1
Следящий привод относится к системам автоматического регулирования но положению. Он может использоваться во многих отраслях техники, например, для унравлення электромеханическими объектами с унругой связью, наприА1ер для радиотелесконов.
Известны следящие приводы, содержащие последовательно соединенные датчик угла рассогласования, усилитель и двигатель, связанный через редуктор со входом объекта, выход которого соединен с датчиком ускорения, через корректирующий блок - с одним из входов усилителя, а через датчик обратной связи - с одним из входов датчика угла рассогласования, датчики тока и скорости двигателя, соединенные соответственно с входом и выходом двигателя.
Предлагаемый следящий привод отличается от известных тем, что в нем установлены последовательно соединенные сумматор и первый дифференциатор, выход которого подключен к одному из входов усилителя, и второй дифференциатор, вход которого соединен с датчиком скорости двигателя, а выход - с одним из входов сумматора, два других входа которого подключены соответственно к выходам датчика тока и датчика ускорения.
Такое построение следящего привода позволяет увеличить точность его работы при ветровых возмущениях.
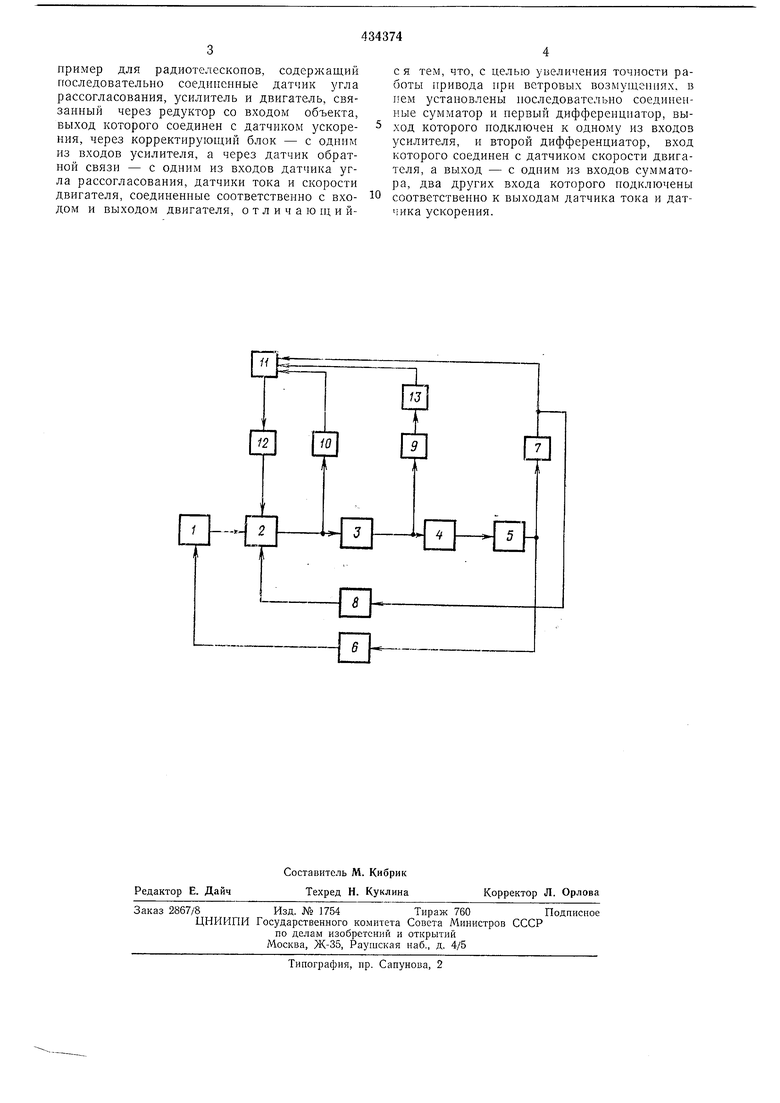
На чертеже приведена блок-схема следящего привода.
Предлагаемый следящий привод содержит датчик угла 1 угла рассогласования, усилитель 2, двигатель 3, редуктор 4, объект 5, датчик 6 обратной связи, датчик 7 ускорения, корректирующий блок 8, датчик 9 скорости двигателя, датчик 10 тока, сумматор 11, первый дифференциатор 12 и второй дифференциатор 13.
Следящий привод работает следующим образом.
Напряжение с датчика 1 угла рассогласования поступает через усилитель 2 на двигатель 3, который разворачивает объект 5 через редуктор 4. Через датчик 6 обратной связи следящий привод замкнут по углу. Для обеспечения устойчивости на усилитель 2 через корректирующий блок 8 подается напряжение
с датчика 7 ускорения, а для увеличения точности работы при ветровых возмущениях - через первый дифференциатор 12 и сумматор 11 - разность напряжений датчика 10 тока, а также датчика 7 ускорения и датчика 9
скорости, предварительно пропущенного через второй дифференциатор 13.
Предмет изобретения
Следящий привод, например, для электромеханических объектов с упругой связью, например для радиотелескопов, содержащий последовательно соедипеппые датчик угла рассогласования, усилитель и двигатель, связанный через редуктор со входом объекта, выход которого соединен с датчиком ускорения, через корректирующий блок - с одним из входов усилителя, а через датчик обратной связи - с одним из входов датчика угла рассогласования, датчики тока и скорости двигателя, соединенные соответственно с входом и выходом двигателя, о т л и ч а о nj. и йс я тем, что, с целью увеличения точности работы привода при ветровых возмущепнях, в установлены последовательно соединенные сумматор и нервый дифференцнатор, выход которого подключен к одному из входов усилителя, и второй дифференциатор, вход которого соединен с датчиком скорости двигателя, а выход - с одним из входов сумматора, два других входа которого подключены соответственно к выходам датчика тока и датчика ускорения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система для управления гелиостатом | 1981 |
|
SU964575A1 |
| Следящая система | 1980 |
|
SU885970A1 |
| Следящий электропривод наведения механической системы | 1988 |
|
SU1562333A2 |
| Следящая система | 1975 |
|
SU742871A1 |
| Нелинейная следящая система | 1989 |
|
SU1615672A1 |
| Следящая система с люфтом | 1981 |
|
SU1012194A1 |
| Следящая система | 1975 |
|
SU608118A1 |
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД | 1990 |
|
RU2015519C1 |
| Следящая система | 1983 |
|
SU1109712A1 |
| Комбинированная следящая система | 1982 |
|
SU1023276A1 |