1
Изобретение относится к области автоматического управления и может быть применено при синтезе систем автоматического управления различного рода объектами.
Известен способ управления, при котором управляющий сигнал принимает два постоянных заранее заданных значения (положительное и отрицательное). Причем формирование управляющего воздействия (смена его полярности) осуществляется в моменты равенства нулю линейной комбинации величины и скорости рассогласования.
Однако при использовании этого способа в системе управления устанавливается скользящий режим, приводящий к затягиванию inepeходного процесса.
Цель изобретения состоит в уменьщевии длительности переходных процессов, возникающих при автоматическом управлении.
В предлагаемом способе эта цель достигается благодаря тому, -что в моменты равенства нулю линейной комбинации величины и скорости рассогласования запоминают величину рассогласования, зафиксированное значение рассогласования .используют в качестве управляющего воздействия, инвертируют управляющее воздействие в моменты равенства текущего рассогласования и заданной части зафиксированной величины рассогласования. Такое управление дает возможность получать
переходные процессы из произвольного состояния объекта в заданное, длительность которых меньше, чем при использовании указанного выше известного способа управления.
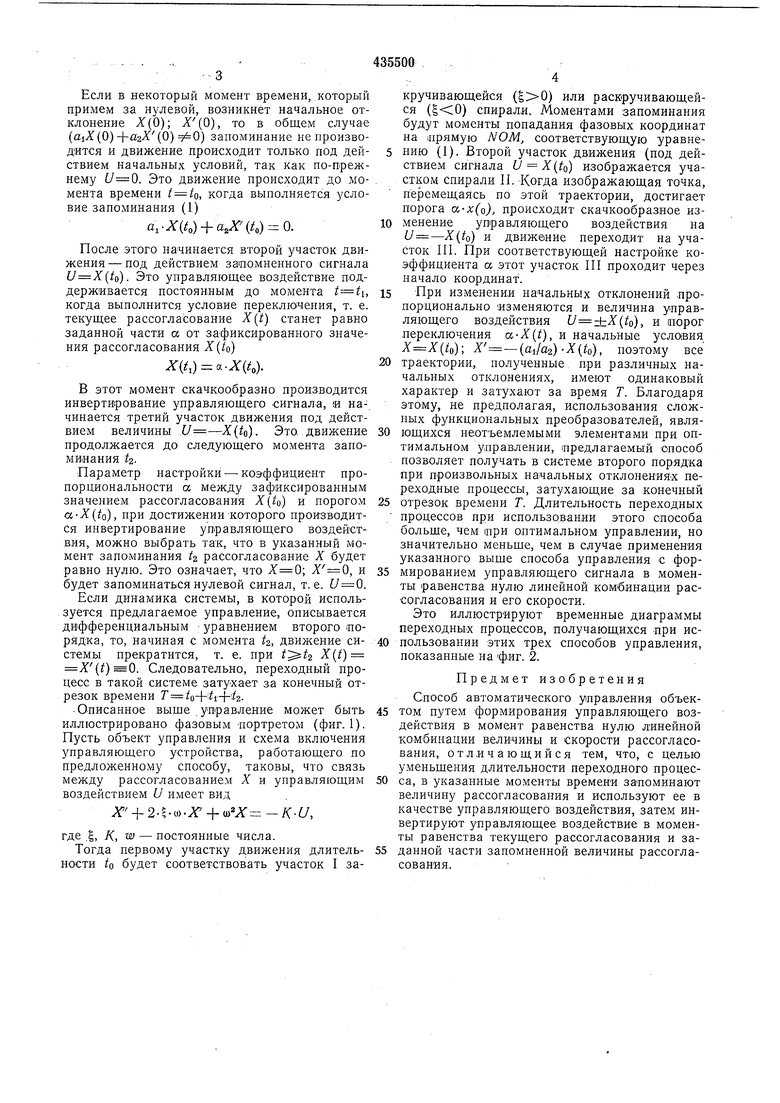
На фиг. 1 показан фазовый портрет системы, формируюшей управление по предлагаемому способу; на фиг. 2 - переходные процессы, получающиеся при использовании известного способа управления с формированием управляющего воздействия в моменты равенства нулю линейной комбинации величины и скорости рассогласования (кривая 1), предлагаемого способа (кривая 2) и оптимального по быстродействию управления (кривая 3).
Управление по предлагаемому способу осуществляется следующим образом.
Предположим, что система находилась в состоянии покоя
X dXldt,
где X - рассогласование системы,
тогда линейная комбинация рассогласования и его скорости равна нулю
a,,,(1)
поэтому производится запоминание нулевого рассогласования и управляющий сигнал U также равен нулю.
Если в некоторый момент времени, который примем за нулевой, возникнет начальное отклонение (0); (0), то в общем случае {aiX(0)+a2X(Q)0) запоминание не производится и движение происходит только под действием начальных условий, так как по-прежнему . Это дв.ижение происходит до момента времени , когда выполняется условие запоминания (1)
a,-X(Q + a,X(,} Q.
После этого начинается второй участок движения - под действием запомненного сигнала (tu). Это управляющее воздействие поддерживается постоянным до момента , когда выполнится условие переключения, т. е. текущее рассогласование X(t) станет равно заданной части а от зафиксированного значения рассогласования X(to)
X(t,) a.-X(,}.
В этот момент скачкообразно производится инвертирование управляющего сигнала, и начинается третий участок движения под действием величины (о). Это. движение продолжается до следующего момента запоминания 2.
Параметр настройки - коэффициент пропорциональности а между зафиксированным значением рассогласования X(tij) и порогом a-X(to), при достижении которого производится инвертирование управляющего воздействия, можно выбрать так, что в указанный момент запоминания tz рассогласование X будет равно нулю. Это означает, что , и будет заиоминаться нулевой сигнал, т.е. t/ 0.
Если динамика системы, в которой используется предлагаемое управление, описывается дифференциальным уравнением второго порядка, то, начиная с момента fe, движение системы прекратится, т. е. при X(t) X(t)Q. Следовательно, переходный процесс в такой системе затухает за конечный отрезок времени Оцисанное выще .управление может быть иллюстрировано фазовым -портретом (фиг. 1). Пусть объект управления и схема включения управляющего устройства, работающего по предложенному способу, таковы, что связь между рассогласованием X и управляющим воздействием U имеет вид
Х + 2-. + ш Х :-К-и,
где ,1, К., W - постоянные числа.
Тогда первому участку движения длительности 0 будет соответствовать участок I закручивающейся () или раскручивающейся (КО) спирали. Моментами запоминания будут моменты попадания фазовых координат на ярямую NOM, соответствующую уравнению (1). Второй участок движения (под действием сигнала U X(tQ) изображается участком спирали II. Когда изображающая точка, перемещаясь по этой траектории, достигает порога а-х(о), происходит скачкообразное изменение управляющего воздействия на (to) и движение переходит на участок in. При соответствующей настройке коэффициента а этот участок П1 проходит через начало координат.
При изменении начальных отклонений лропорционально изменяются и величина управляющего воздействия (to), и порог переключения a-X(t), и начальные условия (ti)); (fli./a2)-(о), поэтому все
траектории, полученные при различных начальных отклонениях, имеют одинаковый характер и затухают за время Т. Благодаря этому, не предполагая, использования сложных функциональных преобразователей, являющихся неотъемлемыми элементами при оптимальном управлении, предлагаемый опособ позволяет получать в системе второго порядка при произвольных начальных отклонениях переходные процессы, затухающие за конечный
отрезок времени Т. Длительность переходных
процессов при использовании этого способа
больше, чем при оптимальном управлении, но
значительно меньще, чем в случае применения
указанного выще способа управления с формированием управляющего сигнала в моменты равенства нулю линейной комбинации рассогласования и его скорости.
Это иллюстрируют временные диаграммы переходных процессов, получающихся при использовании этих трех способов управления, показанные на ф,иг. 2.
Предмет изобретения
Способ автоматического управления объектом путем формирования управляющего воздействия в момент равенства нулю линейной комбинации величины и скорости рассогласования, отличающийся тем, что, с целью уменьщения длительности переходного процесса, в указанные моменты времени запоминают величину рассогласования и используют ее в качестве управляющего воздействия, затем инвертируют управляющее воздействие в моменты равенства текущего рассогласования и заданной части запомненной величины рассогласования.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ОБЪЕКТОМ | 1988 |
|
SU1568765A1 |
| Система автоматического регулирования | 1972 |
|
SU437046A1 |
| Способ управления объектом | 1981 |
|
SU964573A2 |
| Способ автоматического управления в системе с люфтом | 1975 |
|
SU728111A1 |
| Корректирующее устройство | 1983 |
|
SU1145320A1 |
| КОРРЕКТИРУЮЩЕЕ УСТРОЙСТВО С РЕЛЕЙНОЙ ХАРАКТЕРИСТИКОЙ | 1972 |
|
SU435499A1 |
| СПОСОБ СТАБИЛИЗАЦИИ СИСТЕМЫ УПРАВЛЕНИЯ ИНЕРЦИОННЫМ ОБЪЕКТОМ | 1970 |
|
SU283353A1 |
| Трехпозиционный регулятор | 1984 |
|
SU1259208A1 |
| Способ управления объектом | 1976 |
|
SU703773A1 |
| Способ релейного управления объектом с астатизмом второго порядка | 1971 |
|
SU894671A1 |
- -/
