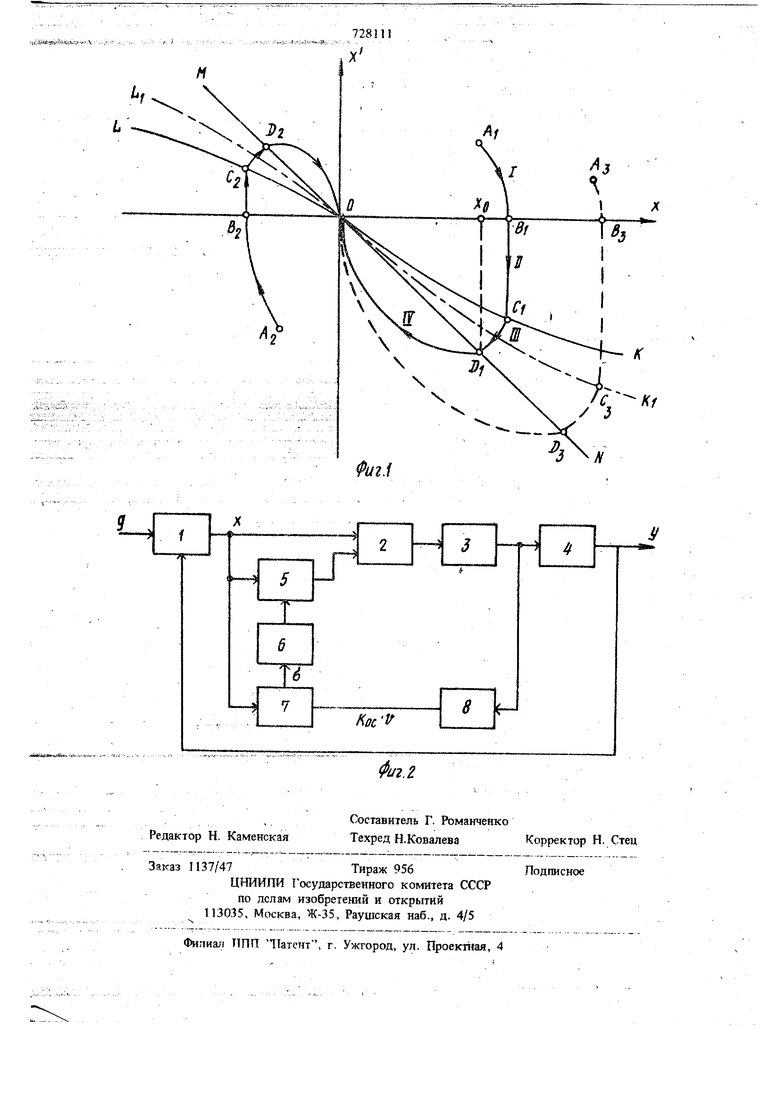
Изобретение относится, к области автоматического управления и может быть использовано при создании автоматических систем с люфтом. - -Известны способы автоматического управления в системах с люфтом, использующие линей ное преобразование основного сигнала управления (рассогласования)11,2. Однако эти способы либо не позволяют устранить автоколебаний , присущих указанным системам, либо устраняют их лишь 1фи весьма ограниченном диапазоне изменения параметров системы. Наиболее близким по технической сущности к предлагаемому является способ автоматического управления, заключающийся в суммировании основного сигнра у1фавления и дополнительного кусочно-постоянного сигнала 3. Причем в этом способе абсолютная величина дополнительного сипала равна половине зоны люфта редуктора исполнительного устройства, а знак совпадает со знаком производной основного сигнала. При использовании этого способа компенсируется влияние люфта, благодаря чему в системе устраняются автоколебания. Недостатком такого способа является значнтельное перерегулирование и время затухания переходных процессов в слабодемпфированных системах. Кроме того, этот способ предусматривает точное соответствие величины дополнительного сигнала величине зоны люфта. Поэтому Щ)И изменении по какой-либо причине величины люфта (например вследствие износа редуктора) в системе Morjnr возникнуть автоколебания. Цель изобретения заключается в повыщении точности управления. Эта цель достигается благодаря тому, что в момент равенства нулю линейной комбинации основного сигнала уг завления и сигнала обратной связи по скорости, запоминают основной сигнал и формируют из него дополнительный постоянный сигнал, определяемый коэффициентом передачи и постоянными времени системы. На фиг. 1 представлен фазовый портрет автоматической сисгемы с люфтом, скорректированной по предлагаемому способу; на фиг. 2 - пример конкретного выполнения автоматической системы с люфтом, реализующий предлагаемый способ. ; 3 7 в описании принять следующие обозначения X - основной сигнал; V - сигнал обратной свяЗй rfo сйорвстй; G - линейная комбинация основного сигнала управления и сигнала обратной связи по скорости; Кос- коэффициент обратной связи; и - дополнительный корректирующий сигнал; . XQ- запомненный основной сигнал; KH- коэффициент пропорвдональности; , R - коэффициент передачи; Т - постоянная време1ш. Система, реализующая предложенный способ (фиг. 2), содержит датчик рассогласования 1, усилительно-преобразовательное устройство 2 исполнительный двигатель 3, редуктор 4, запоминающий элемент 5, нуль-орган 6, элемент сравнения 7, устройство 8 обратной связи. Работает система следующим образом. Предположим, что динамика системы может быть описана дифференциальным уравнением второго порядка. Для исследования процессов в этом случае воспользуемся методом фазовой плоскости (фиГ.1).-угет™ --Равенство нулю линейной комбинации основ ного сигнала управления (рассогласования) X и сигнала обратной связи по скорости V G X + KocV 0,(1) где Кос - постоянное число, на этой плоскости будет соответствовать попаданию изображающей точки на прямую NM (фиг.1). предположим, 4to систеШ йахйдалась в по ложении равновесия. В этом случае линейная комбинация G основного сигнала у1фавленкя и сигнала обратной связи по скорости будет равна нулю, шэтому производится фикс;щия основного сигнала Х р. После этого дополнительный корр ектирующий сигнал U будет поддерживаться равньпй нулю. Пусть в некоторый момент времени в системе вданикает начальное отклонение Х(0): ---- - - -i -.--..-.-------- I X (0) (точка Aj.Ha фиг.1). Если точка Aj Не попадает на прямую NM (то есть линейтая комбинация G начального отклон гния и началь ной скорости не равна нулю), то движение бу дет гфоисходить при нулевом корректирующем Сигнале по траектории 1. В точке Bj, когда скорость X 0, происхо1дат расцепление ведуще го и ведомого Т5яла редуктора, после чего ведр мый вал в течение некоторого временя остаетс неподвижным, в то время как ведущий вал движется в обратном направлении. Отрезок: BiCj фазовой траектории 1J соответствует уравниванию скоростей :вещацего и ведомого валов редуктора, после чего из точки С| по траектории Ijj происходит движение систело. с зацепленными валами редуктора. Это движение происходит до тех пор, пока изображающая точка не попадает на прямую NM (точка Д1 на фиг.1). При этом линейная комбинация (1) становится равной нулю. В этот момент осуществляется фиксация значения основного сигнала XQ (фиг. 1), после чего к ocHOBHOiviy сигналу добавляется дополнительный постоянный сигнал, равный части зафиксированного рассогласования и -КдХо. Под действием его движение системы д)оисходит по траектории IV (фиг. 1). Коэффициент пропорциональности Кц можно выбрать так, что фазовая траектория IY попадает прямо в начало координат О. При этом линейная комбинация G О, позтому в точке О фиксируется значение основного сигнала и дополнительный сигнал скачком становится равным нулю. Таким образом, за конечное время система из произвольного начального состояния переходат точно в положение равновесия и остается в нем. Если в системе возникает новое отклонение (точка АЗ на фиг. 1), то процессы протекают анадогично (траектория АзВзСзДаО на фигЛ) Для обеспечения бписанного режима работы системы необходимо выбрать настроечный параметр KOC в выражении (1) так, чтобы прямая NWI имела шклон не меньще, чем наклон касательной к линии KL, точки которой соответствуют выравниванию скоростей валов редуктора..; Ес. в системе 1фоизойдет увеличение зазора в редукторе, то это приведет к смещению линии KL на фазовой плоскости (см. KjLj на фиг. 1). Однако при этом наклон касательной в начале координат к этбй линии не изменится. Поэтому изменение зазора ,р дуктдра в ходе эксплуатации системы не требует изменения параметров закона управления. На входе устройства 2 к рассогласованию системы X добавляется дополнительный корректирующий сигнал и. Он формируется загоминающим элементом 5, управляющий вход которого связан с нуль-органом 6. Нуль-орган дает сигнал на фиксацию основного сигнала у правлёгая X в тот момент, когда равен нулю сигнал с выхода элемента сравнения 7, йа один вход которого поступает основной сигнал X, а на другой - сигналКос V с выхода устройства 8 обратной связи по скорости. Пусть передаточная функция разомкнутЪй управляемой системы (звеньев 2, 3, 4 на фиг.З). имеет вид Р(ТР + АУ .Покажем, как в этом случае определяются гараметры KQC и KH предлагаемого закона управления по гараметрам управляемой систем В соответствии с траекторией IV наклон касательной к линии KL в начале координат будет равен (-VRT). Из уравнения (1) следует, что угловой коэффициент гфямой NM равен (-l/Koc). Поэтому значение коэффициента KQC огфе-. деляется параметрами системы (коэффициент передачи R и постоянной времени Т) следующим образом Часть КцХо основного сигнала XQ, используема в качестве дополнительного сигнала U, выбирается так, чтобы фазовая траектория (фиг.1) попадала в начало координат. Дифференциальное уравнение, описьгаающее движение системы на этом участке, имеет вид rS -i-P x-R-V o,: (o) ; , X(0).. Решая его, получим уравнение фазовой траектории У в параметрической форме. В случае, .когда корни характеристического уравнения являются комплексно-сопряженными ( f Л:) получим: х(Ч. 4V 1 f-fr4b|-(( 11), где tU |4-4 Чтобы фазовая траектория через время tj после начала движения из точки flj (фиг.1) попала точйо в начало координат, необходимо . . Из условий (4), используя выражение (3), получаем уравнение для определения коэффициента KH CK.(-l) (5) где tj является решением уравнения 1СО,-3,.(,-„.)«,1;(|.П,,„-.,0(С,-, Итак, для реализации предложенного способа управления в системе необходимо значения параметров KH и Кос выбирать в соответствии с соотношениями (2, 5, 6). Таким образом, предложенный спосоо автоматического упраяления, являясь несложным в реализации, в то же время позволяет сушественно улучшить показатели качества системы с люфтом: устранить автоколебания, уменьшить время затухания переходных процессов, устрашать перерегулирование, уменьшить интегральную ошибку системы, обеспечить независимость характера переходных процессов от величины зоны люфта. Формула изобретения Способ автоматического управления в системе с люфтом, заключающийся всуммировании основного сигняга управления и дополнительного кусочно-постоянного сигнала, отличающийся тем, что, с целью повьпиения точности управления, в момент равенства нулю линейной комбинации основного сигнала управления и сигнала обратной связи по .с сорости запоминают основной сигнал и формируют из него дополнительный постоянньш сигнш1, Определяемый коэффициентом передачии постоянными времени системы. Источники информации, принятые во внимание при экспертизе 1. Пальтов И. П. О синтезе линейных корректирующих устройств в йелинейных автомати ческих системах.Анализ и синтез систем автоматического управления. Сборник Наука, 1968. 2.Нелинейные корректирующие устройства в системах автоматического управления под ред Е. П. Попова и Ю. И. Топчеева, Машиностроение, 1971. 3.Авторское сввдетельство СССР № 243010, кл. G 05 В 5/00, 1968.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящий пъезопривод с коррекцией неоднозначной статической характеристики | 1982 |
|
SU1120279A1 |
| Корректирующее устройство | 1983 |
|
SU1145320A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2114455C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2154295C1 |
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД | 1990 |
|
RU2015519C1 |
| Следящая система | 1975 |
|
SU742871A1 |
| Корректирующее устройство | 1985 |
|
SU1278805A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В НЕЛИНЕЙНОЙ СИСТЕМЕ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2149437C1 |
| Способ управления объектом | 1981 |
|
SU964573A2 |
| Следящая система | 1980 |
|
SU885970A1 |