1
Изобретение относится к автоматическому управлению и предназначено для использования в прецезионных системах автоматического регулирования различных технологических параметров.
Известны автоматические регуляторы параметров производственных процессов, содержащие датчик, выход которого подсоединен к измерительному преобразователю через блок программируемого подавителя и задатчика, выполненного в виде шаговых двигателей, связанных с движками последовательно соединенных потенциометров, регулирующий и исполнительный блок, подключенный к выходу измерительного преобразователя через блок программируемого вторичного задатчика, выполненного в виде шагового двигателя,, соединенного с движком потенциометра, и программный блок управления, включающий схему задания программы, формирователь выходных импульсов и коммутатор двигателей, посредством которого один выход схемы задания программы соединен со средними точками обмоток шаговых двигателей блоков программируемого подавителя и задатчика и 7рограммируемого вторичного задатчика.
Для упрощения и повышения надежности работы устройства его программный блок управления содержит схему управления шаговыми двигателями, вход которой через формирователь выходных импульсов соединен с другим выходом схемы задания программы, а выход- с концами параллельно включенных обмоток шаговых двигателей блоков программируемых подавителя и задатчика и программируемого вторичного задатчика.
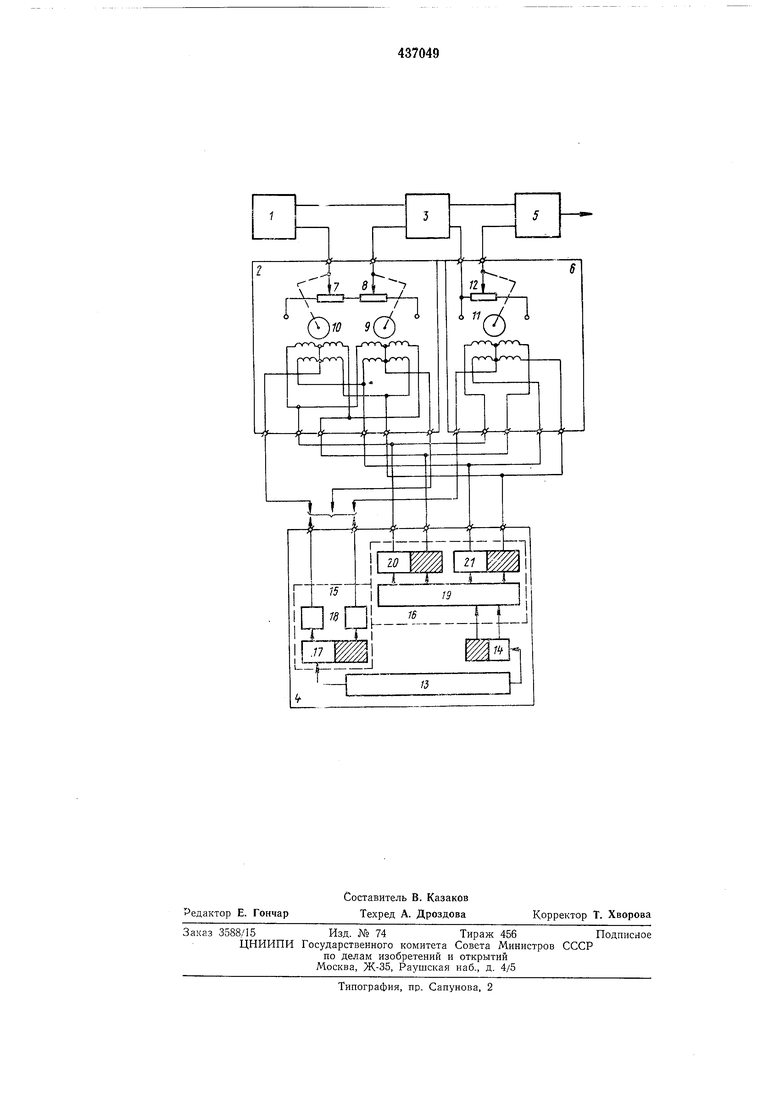
На чертеже показана функциональная схема описываемого устройства. Она содержит датчик 1, блок программируемого подавителя и задатчика 2, измерительный преобразователь 3, программный блок управления 4, регулирующий и исполнительный блок 5, блок программируемого вторичного задатчика 6, потенциометры подавителя
и задатчика 7 и 8, шаговые двигатели подавителя и задатчика 9 и 10, шаговый двигатель вторичного задатчика 11, потенциометр вторичного задатчика 12, схему задания программы 13, формирователь выходных импульсов 14, коммутатор двигателей 15, схему управления шаговыми двигателями 16, выходной триггер 17, ключи 18, спусковую схему 19, триггеры 20 и 21 и обмотки шаговых двигателей 22.
Автоматический регулятор работает следующим образом. Датчик 1, установленный на объекте, воспринимает и замеряет сигнал, пропорциональный регулируемому параметру, который подается на вход измерительного
устройства 3. Последовательно с сигналом
датчика 1 на вход подаются и сигналы, пропорциональные уровню подавления и задания параметра, снимаемые с движков 7 и 8 потенциометров подавления и задания блока подавителя э.д.с. 2. Движки потенциометров 7 и 8 соответственно связаны и перемещаются вручную или автоматически по программе от двигателей 9 и 10, при этом через средние точки управляющих обмоток 22 проходит ток в соответствии с командами, поступающими со схемы задания программы. Программное управление может осуществляться на одном (любом) или обоих потенциометрах 7 и 8 в зависимости от требований эксплуатации. При автоматическом (программном) или дистанционном ручном управлении командная информация подается с программного блока управления 4. В случае программирования поддиапазона задания на входе измерительного блока в соответствии с уровнем, скоростью и знаком изменения задаваемого параметра, времени выдержки, направления наклона и номера участка, порядком переключения участков и поддиапазонов сигнала в виде импульсов с выходных триггеров 14 канала формирования выходных импульсов через схему управления 16 (состоящую из спусковой схемы 19 и триггеров 20, 21) постоянно поступает на концы всех обмоток шагового электродвигателя. Сигналы при программировании поддиапазонов подавления подаются точно также. Сигналы подключения поддиапазонов подавления или задания и включения электродвигателей в рабочее состояние (работу) снимаются с выходного триггера 17 и ключей 18 канала коммутатора 15 и подаются на среднюю точку обмоток 22 двигателя 9 или 10 каналов подавлепия или задания, замыкая всю цепь управления и возбуждая щаговый двигатель. В зависимости от числа следования импульсов, прощедщих на тот или иной двигатель, он отрабатывает перемещение вала и движка потенциометра на определенный угол со скоростью в зависимости от частоты поступления импульсов, изменяя тем самым величину сигнала подавления или задания на входе измерительного устройства 3. Диапазоны задания обычно составляют Vi6, /20, реже /4 и т. д. от шкалы подавления. В случае необходимости программирования задания на выходе измерительного блока 3, т. е. программирование задания в еще более узких пределах, например /iss, i/256 и
т. д. (зависит от типа и щкалы датчика и пределов входа измерительного блока, т. е. в зависимости от величины коэффициента подавления параметра), к выходным клеммам
программного блока управления 4 вместо одного из каналов подавителя э.д.с. 2 подсоединяется программируемый вторичный задатчик 6. Тогда роль программируемого подавителя может играть либо канал подавления
«грубо, либо канал задания «точно на входе измерительного блока. Непрограммируемый канал на входе может управляться вручную, или же ноставлен на постоянное неизменяемое значение или вообще отключен (в
этом случае может быть использована модификация одноканального программируемого подавителя или задатчика). Процесс программирования аналогичен предыдущим случаям.
Предмет изобретения
Автоматический регулятор параметров производственных процессов, содержащий датчик,
выход которого подсоединен к измерительному преобразователю через блок программируемого подавителя и задатчика, выполненного в виде двух шаговых двигателей, связанных с движками последовательно соединенных потенциометров, регулирующий и исполнительный блок, подключенные к выходу измерительного преобразователя через блок программируемого вторичного задатчика, выполненного в виде шагового двигателя, соединенного с движком потенциометра и программный блок управления, включающий схему задания программы, формирователь выходных импульсов и коммутатор двигателей, посредством которого один выход схемы задания
программы соединен со средними точками обмоток щаговых двигателей блоков программируемого подавителя и задатчика и программируемого вторичного задатчика, отличающийся тем, что, с целью упрощения и повышения надежности работы, программный блок управления содержит схему управления шаговыми двигателями, вход которой через формирователь выходных импульсов соединен с другим выходом схемы задания программы,
а выход - с концами параллельно включенных обмоток щаговых двигателей блоков программируемого подавителя и задатчика и программируемого вторичного задатчика.
10 9
Xi
I г
7
i ff/-/ i
«.
/3
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКИЙ РЕГУЛЯТОР ПАРАМЕТРОВ ПРОИЗВОДСТВЕННЫХ ПРОЦЕССОВ | 1972 |
|
SU432460A1 |
| —I БИБЛИОТЕКА I | 1973 |
|
SU392460A1 |
| УСТРОЙСТВО для ЗАМЕРА УГЛОВ | 1973 |
|
SU399719A1 |
| Программный регулятор температуры | 1978 |
|
SU809106A1 |
| Пружинонавивочное устройство | 1973 |
|
SU478656A1 |
| Устройство для программного управления | 1976 |
|
SU566241A1 |
| Устройство программного управления режимом тепловлажностной обработки бетонных и железобетонных изделий | 1983 |
|
SU1102791A1 |
| Устройство для дозирования | 1979 |
|
SU809079A1 |
| Система контурного управления промышленного робота | 1986 |
|
SU1430256A1 |
| Устройство для автоматизированного поворота тракторного агрегата | 1979 |
|
SU988212A1 |