1
Изобретение относится « области лодъемнотранспортного о-борудования.
Известны навесные устройства к «ранам для установки груза в труднодоступные места, включающие грузонесущий рычаг с захватным органом, закрепленным на грузовой подвеске, навешиваемой при помощи поддерживающего каната на крюк грузоподъемного механизма.
Предлагаемое устройство отличается тем, что грузовая подвеска выполнена в виде кронштейна Г-образной формы, шарнирно соединенного с грузонесущИМ рычагом и связанного с ним полиспастом, образованным поддерживающим канатом. Причем кронштейн выполнен с двумя точками олоры, а грузонесущий рычаг снабжен упорами, взаимодействующи.ми с кронштейно.м.
Эти отличия повышают производительность устройства и улучшают условия труда при установке грузов в труднодоступные Места за счет автоматизации процессов захвата и освобождения груза, а также расширяют техно.тогию применения устройства.
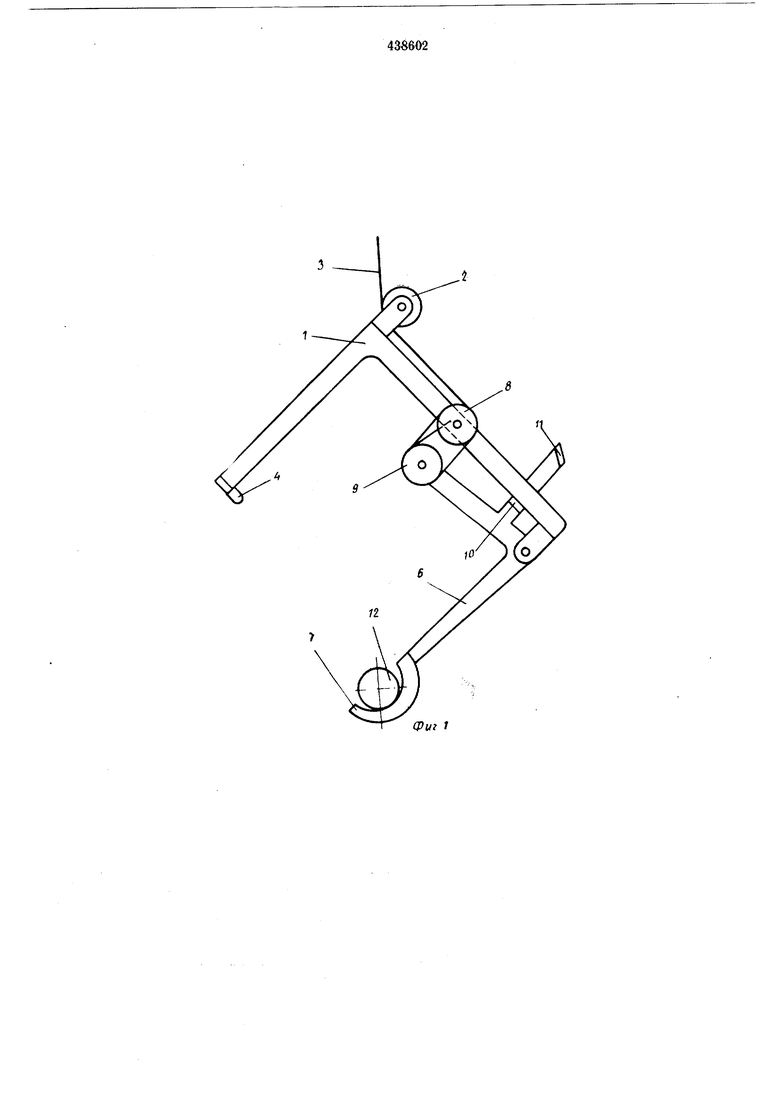
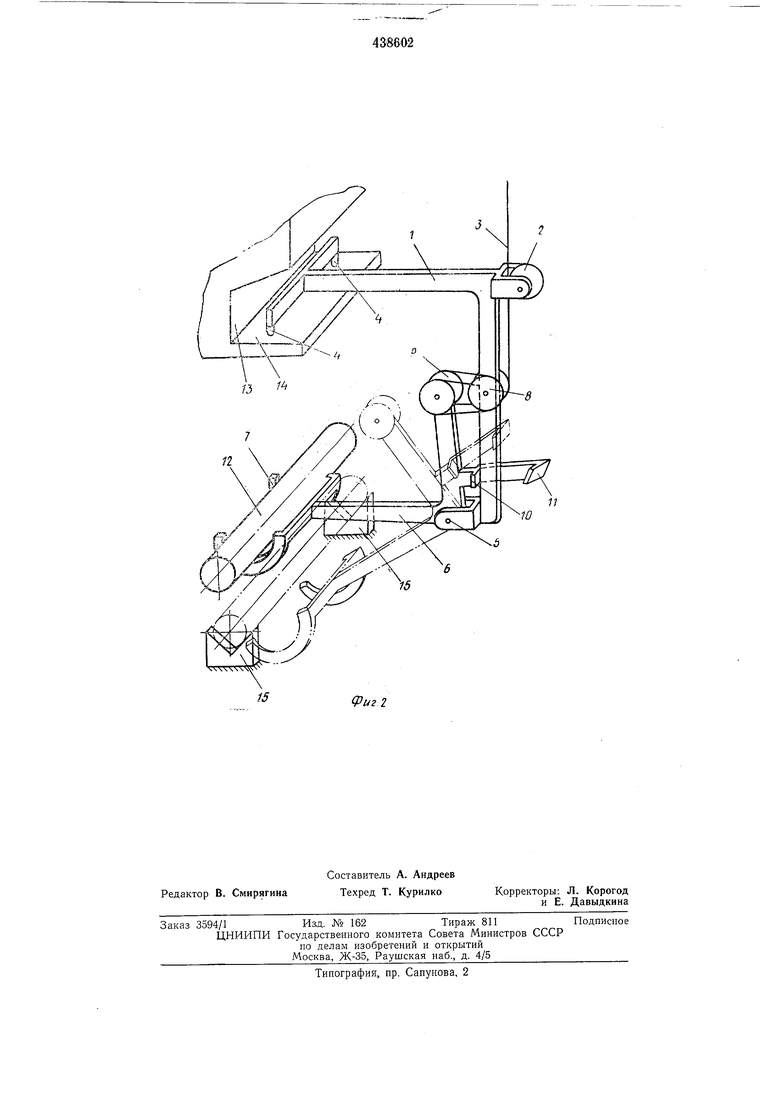
На фиг. 1 показано предлагае.мое навесное устройство при транспортировании груза; на фиг. 2 - то же, ири выполнении погрузочноразгрузочных работ.
Навесное устройство состоит из «ронштейна 1 Г-образной формы, через блок 2 -которого
пропущен поддерживающий канат 3, навешиваемый яа крюк крапа. Одна сторона Г-образного кронштейна оканчивается двумя сферическими онорами 4. С другой стороны кронштейн 1 при помощи шарнира 5 соединен с грузонесущим рычагом 6, снабженным захватным органом 7, форма которого зависит от формы изделия. Кроме того, грузонесущий рычаг связан с кронштейном 1 блоками 8 и 9 полиспаста. Гибким органом полиспаста служит поддерживающий канат 3.
На грузонесущем рычаге расположены улоры 10 и 11.
Навесное устройство работает следующим Образом.
При транспортировании изделия 12 (например, (Вала) центр тяжести захвата с изделием располагается но оси поддерживающего- каната. При этом захватный орган 7 находится в крайнел верхнем положении, а упор 10 упирается в .кронштейн 1 (см. фиг. I).
Для выполнения погрузочно-разгрузочных работ в труднодоступном .месте, налример в закрытой сверху зоне, необходимо иметь над ней какую-либо полку или (см. фиг. и) нишу 13 с дном 14. Сферические олоры 4 устройства заводятся в нишу il3. Наличие двух сферических опор необходимо для придания кронштейну устойчивого положения при работе. Кран включается на опускание поддерживающего .каната 3 с кронштейном 1, и последний садится сферическими опорами 4 на дно 14 ниши. ДальнейШбе онускание ноддерживающего каната 3 автоматически обеспечивает поворот кронштейна на сферических опорах и, следовательно, введение изделия 12 в закрытую сверху зону. При дальнейшем опуска нии поддерживающего каната обеспечивается поворот грузонесущего рычага б относительно кроншт-ейна 1 (фиг. 2) до упора 11, благодаря чему опускается захватный орган 7, и изделие 12 устанавливается на призмы 15. После освобождения захватного органа 7 от изделия 12 кра-н включается на подъем. Автоматически сначала поднимается захватный орган 7 гв свое верхнее положение, грузонесущий рычаг 6 поворачивается по часовой стрелке (фиг. 2), пока упор 10 не косн-ется кронштейна 1, а затем .поворачивается и само устройство на сферических опорах 4, пока центр тяжести его не совпадет с осью поддерживающего каната 3. В этом положении устройства его сферические опоры 4 отходят от дна .14 ниши 13. Перед подъемом устройство вручную несколько отклоняется, чтобы поднимающийся захватный орган 7 дрошел .мимо изделия 12, лежащего на призмах Г5. Аналогичные операции проводятся и с пустым захватом при необходимости снятия изделия 12 с .призм 15. В этом случае, наоборот, кронштейн вручную неоко-лько отклоняется в противоположную сторону, чтобы .поднимающийся захватный орган 7 подхватил изделие 12. Навесное устройство поворачивается .на сферических опорах 4 при опускании поддерживающего каната 3 до тех пор, пока усилие на поддерживающем .канате 3 не уменьшится до величины натяжения ветви .каната полиспаста от веса изделия 12 и грузонесущего рычага 6. При этом центр тяжести устройства и изделия располагается между блоком 2 и сферическими опорами 4, ближе к последним. Причем угол поворота кронштейна при опусканий захватного органа 7 (грузонесущий рычаг 6 поворачивается против часовой стрелки в соответствии с фиг. 2) будет больше, чем при подъеме его (грузонесущий рычаг 6 поворачивается по часовой стрелке в соответствии с фиг. 2) за счет равного направления силы трения между поддерживающим канатом 3 и блоками 2 и 8 на .кронштейне 1. Чем больше кратность полиспаста, тем меньше будет усилие на поддерживаюшем канате 3 от веса изделия 12 и грузо.несущего рычага 6 и тем меньше будет разность указанных углов поворота кронштейна. Но с увеличением кратности полиспаста возрастает длина ветвей каната его и, следовательно, время срабатывания зах)ватного органа. Предмет изобретения 1.Навесное устройство к крану для установки груза в труднодоступные места, включающее грузонесущий рычаг с захватным органом, закрепленный на грузовой подвеске, навешиваемой при помощи поддерживающего каната на крюк грузоподъемного -механизма, отличающееся тем, что, с целью повышения производительности, улучшения условий труда, и расширения технологии применения устройства, грузовая подвеска выполнена в виде кронштейна Г-образной формы, шарнирно соединенного с грузонесущим рычагом и связанного с ним .полиспастом, образованным поддерживающим канатом. 2.Устройство по п. 1, отличающ.ееся тем, что, с целью обеспечения -его устойчивости при работе, .кронштейн выполнен с двумя точками опоры. 3.Устройство по п. 1, отличающееся тем, что, с целью обеспечения возможности фиксации захватного органа в крайних положениях, грузонесущий рычаг снабжен упорами, взаимодействующими с кронштейном.
CPui J
(Риг 2
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство | 1986 |
|
SU1341142A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 1990 |
|
RU2009978C1 |
| ГРУЗОПОДЪЕМНОЕ УСТРОЙСТВО ПРЕИМУЩЕСТВЕННО ДЛЯ МОНТАЖА МОБИЛЬНОГО ОБЪЕКТА | 1996 |
|
RU2097312C1 |
| ТРАВЕРСА | 2008 |
|
RU2385282C1 |
| Грузозахватное устройство | 1980 |
|
SU931656A1 |
| Устройство для навески изделий на подвесной грузонесущий конвейер | 1985 |
|
SU1283193A1 |
| Грузозахватное устройство | 1990 |
|
SU1736904A1 |
| Захватное устройство для ступенчатых цилиндрических грузов | 1990 |
|
SU1766823A1 |
| Устройство для подачи объектов на сооружение | 1979 |
|
SU856969A1 |
| Строительный подъемник | 1982 |
|
SU1104088A1 |