вижным выходным у 19. Под У 19 шарнирно закреплены посредством оси жестко связанные между собой подпружиненные управляющие рычаги (Р) 24 и поддерживающие Р 21 с опорными роликами 22. Ролики 22 установлены на концах Р 21 и взаимодействуют с У 19. Грузонесущий орган и передающий механизм выполнены в виде приводных кареток 7 и 15 с захватами 8 и 16. Каретка 7 установлена на У 6, а каретка 15 - на У 14 стойки 1. Каретки 7 и 15 пооче1
Изобретение относится к механизмам навески и съема и может быть использовано на производствах, связанных с перемещением цилиндрических грузов с отверстием, например, гидроцилиндров с подвесного толкающего конвейера на грузонесущий, например, окрасочный конвейер.
Цель изобретения - повыщение производительности.
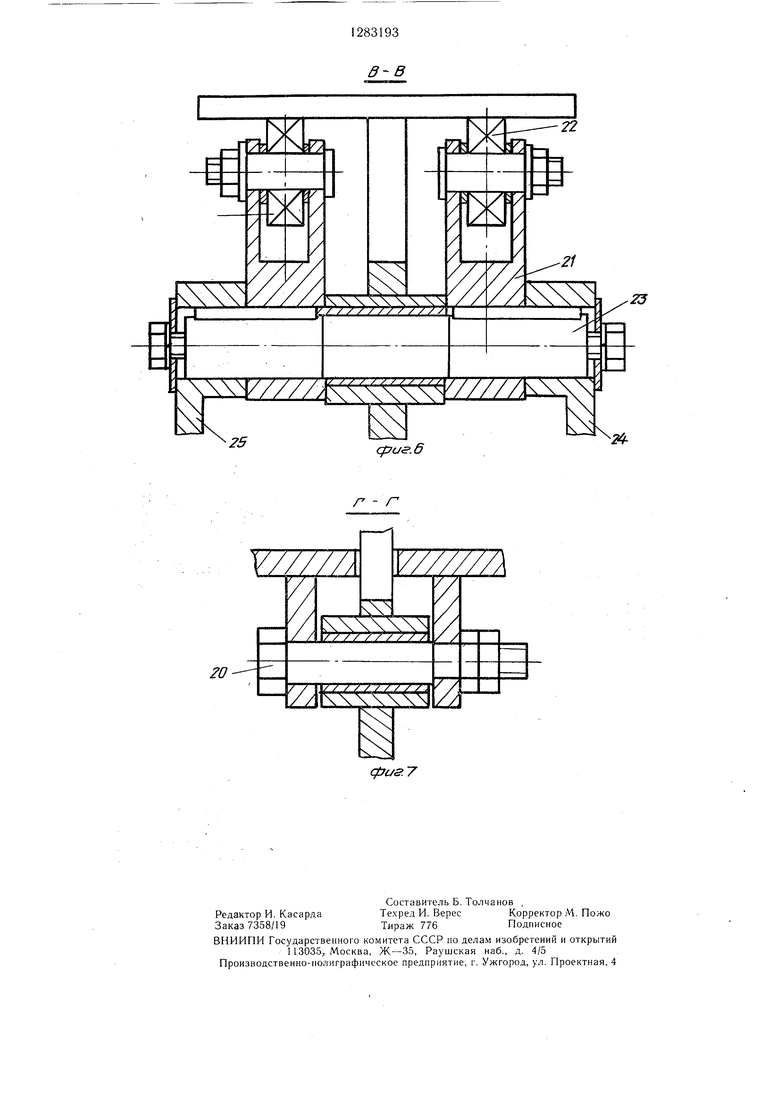
На фиг. 1 изображено устройство, общий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - узел I на фиг. 1; на фиг. 4 - вид Б на фиг. 3; на фиг. 5 - узел II на фиг. 1; на фиг. 6 - разрез В-В на фиг. 5; на фиг. 7 - разрез Г-Г на фиг. 5.
Устройство для навески на подвесной грузонесущий конвейер содержит Г-образную : стойку 1, установленную перпендикулярно движению подвесного конвейера, в верхней части которой щарнирно крепится промежуточный грузонесущий орган, выполненный в виде крюков 2, служащий для удержания изделия 3 на технологическую ось 4 перед навешиванием на подвеску 5 подвесного конвейера. На наклонном участке 6 Г-образной стойки 1 установлен подвижный грузонесущий орган, представляющий собой каретку 7 с захватами 8, служащими, для фиксации изделия 3 за технологическую ось 4. С одной стороны каретка 7 соединяется тросом трособлочной системы 9 с осью блоков полиспастной системы 10. Другая сторона каретки 7 связана тросом с подвещенным контгрузом 11.
Привод трособлочной системы 9 осуществляется пневмоцилиндром 12, щток которого связан с кареткой 13 и блоками полиспастной системы 10. На конце горизонтального участка 14 Г-образной стойки 1 установлен подвижный передающий механизм, представляющий собой каретку 15 с захватами 16, которая соединена с приводом в виде пнев- моцилиндра 17. На конце горизонтального участка 14 Г-образной стойки 1 установлен копир с неподвижным 18 и подвижным 19
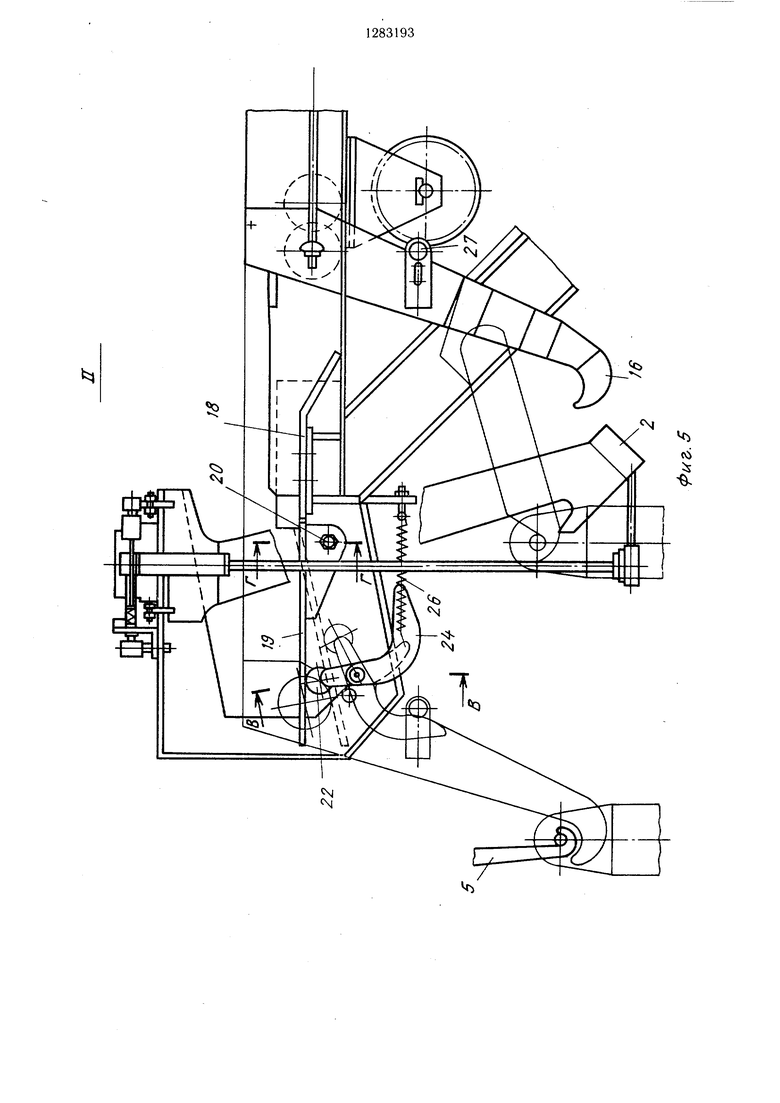
редно подают на крюки 2 и снимают с них изделия 3. Захват 16 имеет управляющий ролик 27, взаимодействующий с одним из Р 24. Изделие 3 поднимается кареткой 7 и навещивается на крюк 2. Каретка 15, накатываясь на У 18, захватывает изделие 3. Далее каретка 15 накатывается на У 19, который поворачивается вокруг шарнира и опускается. Изделие 3 навещивается на подвеску 5 подвесного конвейера. 7 ил.
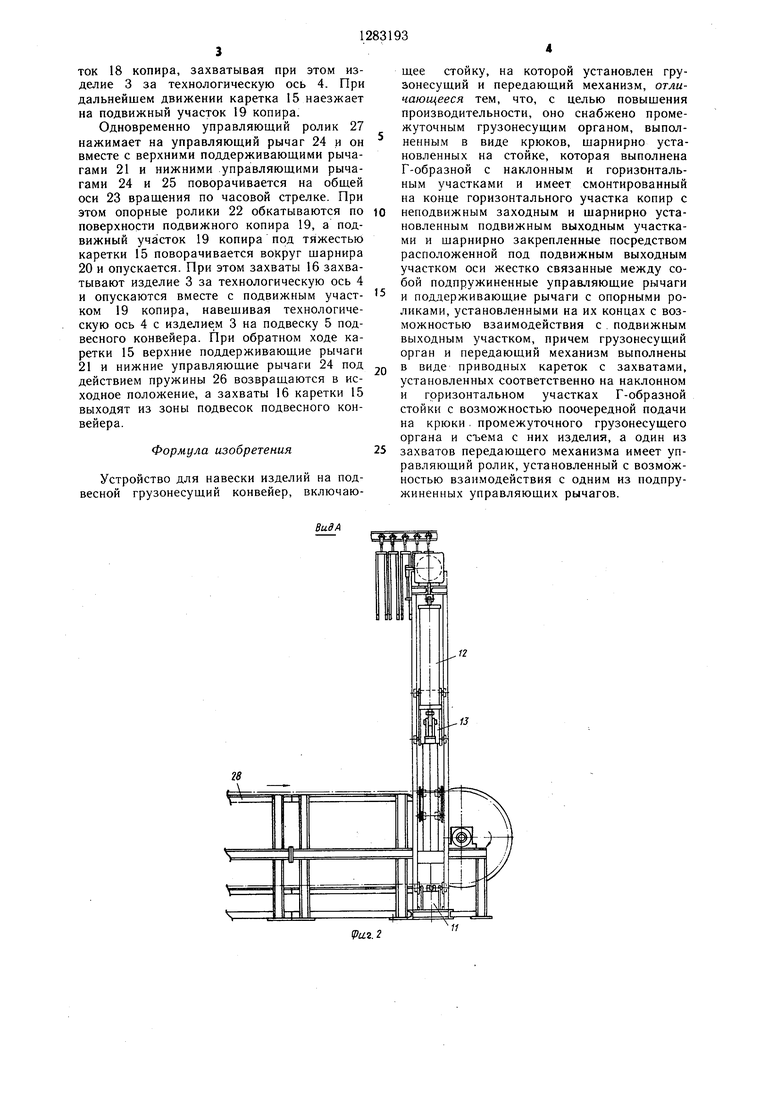
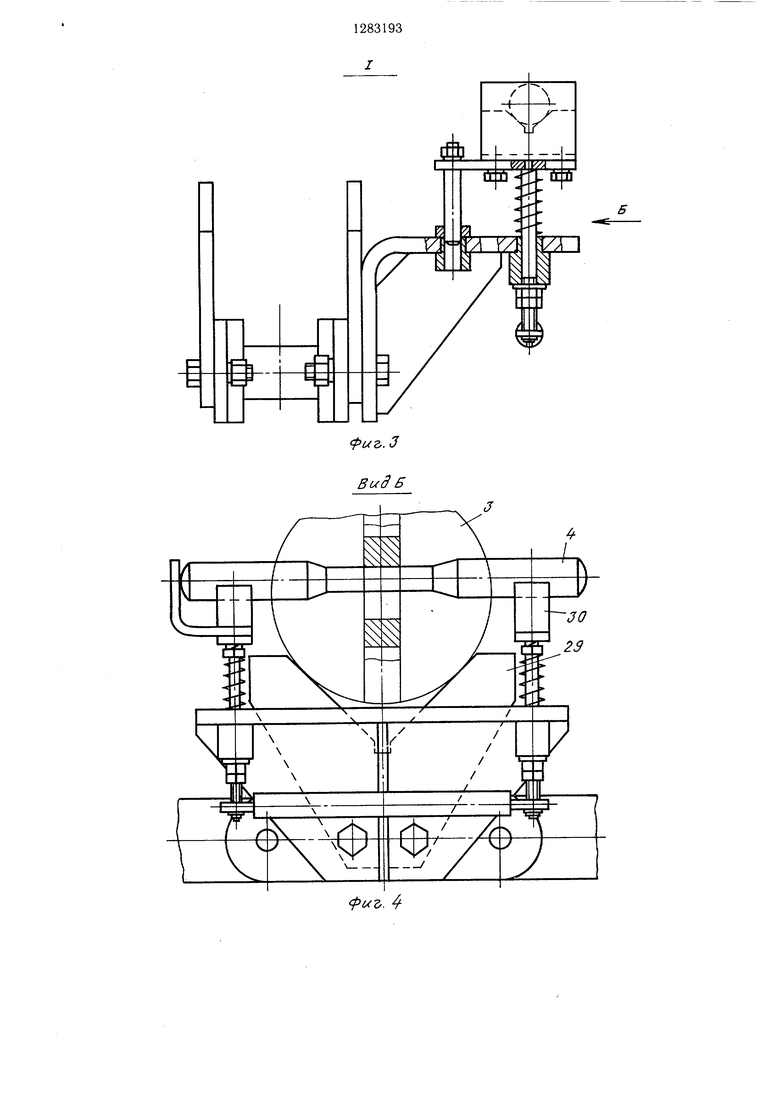
участками, с щарниром 20, удерживаемый в горизонтальном положении двумя поддерживающими верхними рычагами 21, на которых щарнирно закреплены опорные ролики 22. При этом рычаги 21 жестко соединены на размещенной под подвижным участком 19 общей оси 23 вращения с нижними управляющими рычагами 24 и 25 и пружиной 26. На захвате 16 каретки 15 закреплен управляющий ролик 27. Изделие 3 к
устройству для навески на подвесной грузонесущий конвейер подается промежуточным щаговым цепным конвейером 28. Изделие 3 укладывается в призмы 29 конвейера 28. В отверстие изделия 3 вставляется технологическая ось 4, которая поджимается к стенке отверстия подпружиненными призмами 30. Устройство для навески изделий на подвесной грузонесущий конвейер работает следующим образом.
В исходном положении каретка 7 занимает нижнее крайнее положение. После остановки щагового цепного конвейера 28 с изделием 3 на призмах 29 подается сигнал пневмоцилиндру 12 на опускание каретки 13 с блоками полиспастной системы 10. При этом каретка 7 перемещается по
наклонному участку 6 Г-образной стойки 1 и захватами 8 за технологическую ось 4, поджатую призмами 30 к стенке отверстия изделия 3, поднимает изделие 3 и навешивает его на промежуточный грузонесущий орган, выполненный в виде крюков 2.
Каретка 7 при обратном ходе порщня пневмоцилиндра 12 через трособлочную систему 9 и под действием контргруза 11 возвращается в исходное нижнее положение. Снятие изделия 3 за технологическую ось 4 промежуточного грузонесущего органа, выполненного в виде крюков 2, и навешивание на подвеску 5 подвесного конвейера происходит при движении каретки 15 от пневмоцилиндра, 17- Каретка 15, перемещаясь по горизонтальному участку 14 Г-образной стойки 1, накатывается на неподвижный учас
ток 18 копира, захватывая при этом изделие 3 за технологическую ось 4. При дальнейшем движении каретка 15 наезжает на подвижный участок 19 копира.
Одновременно управляющий ролик 27 нажимает на управляющий рычаг 24 и он вместе с верхними поддерживающими рычагами 21 и нижними управляющими рычагами 24 и 25 поворачивается на общей оси 23 вращения по часовой стрелке. При этом опорные ролики 22 обкатываются по поверхности подвижного копира 19, а подвижный уча сток 19 копира под тяжестью каретки 15 поворачивается вокруг щарнира
20и опускается. При этом захваты 16 захватывают изделие 3 за технологическую ось 4 и опускаются вместе с подвижным участком 19 копира, навещивая технологическую ось 4 с изделием 3 на подвеску 5 подвесного конвейера. При обратном ходе каретки 15 верхние поддерживающие рычаги
21и нижние управляющие рычаги 24 под действием пружины 26 возвращаются в исходное положение, а захваты 16 каретки 15 выходят из зоны подвесок подвесного конвейера.
Формула изобретения
Устройство для навески изделий на подвесной грузонесущий конвейер, включаю
п
5
5
щее стойку, на которой установлен грузонесущий и передающий механизм, отличающееся тем, что, с целью повыщения производительности, оно снабжено промежуточным грузонесущим органом, выполненным в виде крюков, щарнирно установленных на стойке, которая выполнена Г-образной с наклонным и горизонтальным участками и имеет смонтированный на конце горизонтального участка копир с неподвижным заходным и шарнирно установленным подвижным выходным участками и шарнирно закрепленные посредством расположенной под подвижным выходным участком оси жестко связанные между собой подпружиненные управляющие рычаги и поддерживающие рычаги с опорными роликами, установленными на их концах с возможностью взаимодействия с , подвижным выходным участком, причем грузонесущий орган и передающий механизм выполнены в виде приводных кареток с захватами, установленных соответственно на наклонном и горизонтальном участках Г-образной стойки с возможностью поочередной подачи на крюки промежуточного грузонесущего органа и съема с них изделия, а один из захватов передающего механизма имеет управляющий ролик, установленный с возможностью взаимодействия с одним из подпружиненных управляющих рычагов.
ВидА
Риг. 2
фиъ.З
Вид Б
MZ. 4
.б
2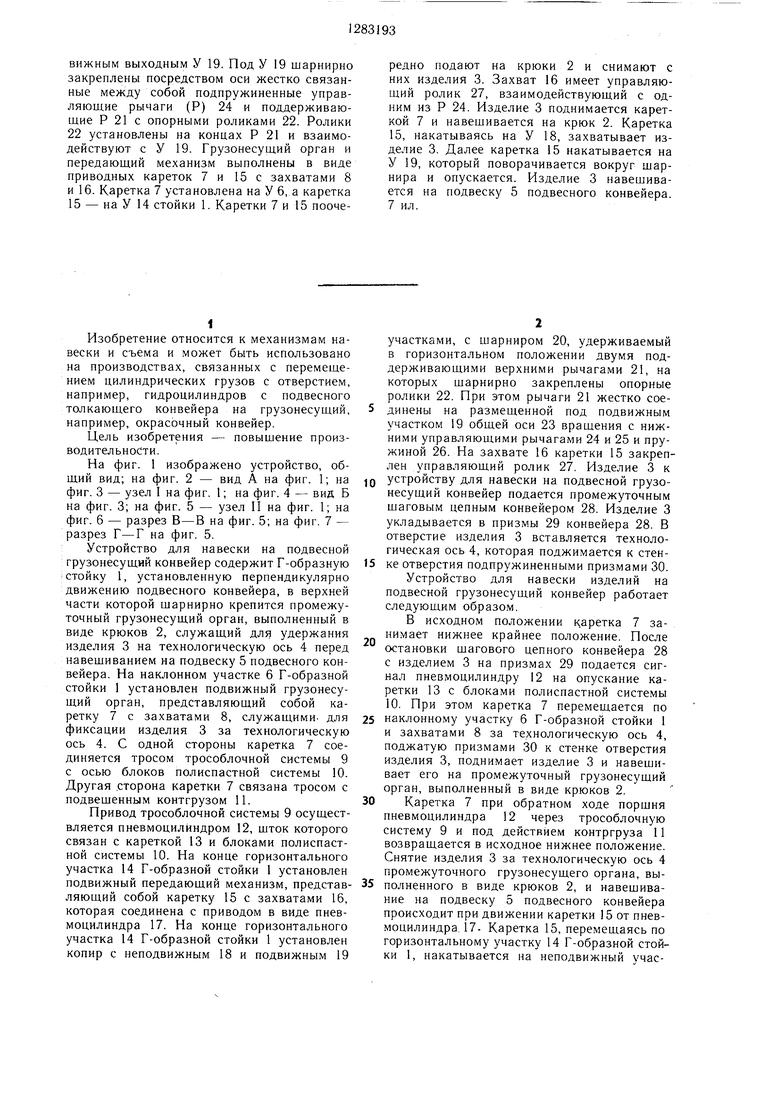
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для навешивания и съемаиздЕлий | 1979 |
|
SU806566A1 |
| Подвесной конвейер | 1959 |
|
SU122067A1 |
| Поворотная подвеска грузонесущегопОдВЕСНОгО КОНВЕйЕРА | 1979 |
|
SU814818A1 |
| Подвесной грузонесущий конвейер | 1975 |
|
SU580147A1 |
| Устройство для перегрузки подвесок с подвесного конвейера | 1978 |
|
SU770951A1 |
| Устройство для навешивания и съема крупногабаритных изделий с грузонесущих подвесок подвесного конвейера | 1980 |
|
SU956385A1 |
| Кран для погрузочно-разгрузочныхОпЕРАций HA пОдВЕСНОМ КОНВЕйЕРЕ | 1979 |
|
SU806587A1 |
| Подвеска подвесного грузонесущего конвейера | 1988 |
|
SU1661089A1 |
| Устройство для перегрузки подвесок с траверс подвесного конвейера | 1981 |
|
SU1004227A1 |
| ПОДВЕСНОЙ ГРУЗОНЕСУЩИЙ КОНВЕЙЕРвсгсо:ЗСНАЯ;;:::;';Е:1ш::^ .'ЕКА | 1970 |
|
SU284700A1 |
Изобретение предназначено для перемещения цилиндрических грузов с отверстиями и позволяет повысить производительность. Для этого устройство снабжено промежуточным грузонесущим органом, выполненным в виде крюков 2. Крюки 2 шарнир- но установлены на Г-образной стойке 1 с наклонным участком (У) 6 и горизонтальным У 14. На конце горизонтального У 14 смонтирован копир с неподвижным заход- ным У 18 и шарнирно установленным под/7 S (Л 2 to СХ) со со со
У/////
//// /7/// /
/ / Ш. / // / // /
//114 1//;
Г - Г
//////А
cpfjs.7
| Перегружатель изделий | 1976 |
|
SU735518A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Перегружатель | 1973 |
|
SU519373A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
