Изобретение относится к общему машиностроению.
Известно устройство для контроля положения груза при его нодъеме, содержаиц,ее двузвенинк, регистрирующий нрнбор н захваты. Сложность измерений известным устройством и низкая нроизБоднтельность труда обусловлены тем, что регистрирующий нрнбор реагирует только на измеиеиие относительных угловых положений тяговых ветвей в плоскости, параллельной нлоскостн двузвенника; захваты устройства жестко связаны с нлечами двузвенника, а плечи двузвеиника вынолнены нерегулируемыми по длине.
Для повышения производительности труда и упрощения измерений в предлагаемом устройстве оба звена вьгполиены регули руемыми по длине, снабжены «а концах шаровыми шаринрами для прИкренления к захватам, а между звеньями встроен соединительный ииарнир с нрисиособлеиием для измерения величины угла между звеньями. Кроме того, захваты, закрепляемые на грузе и на нодъемном устройстве, вынолнены в виде шарнирио соединенных трех элементов, к одному из которых шарнирно прикреплено звено двузвенника, второй выполнен изменяемым но длине, а третий элемент закреплен неподвижно на грузе или иодъемном устройстве.
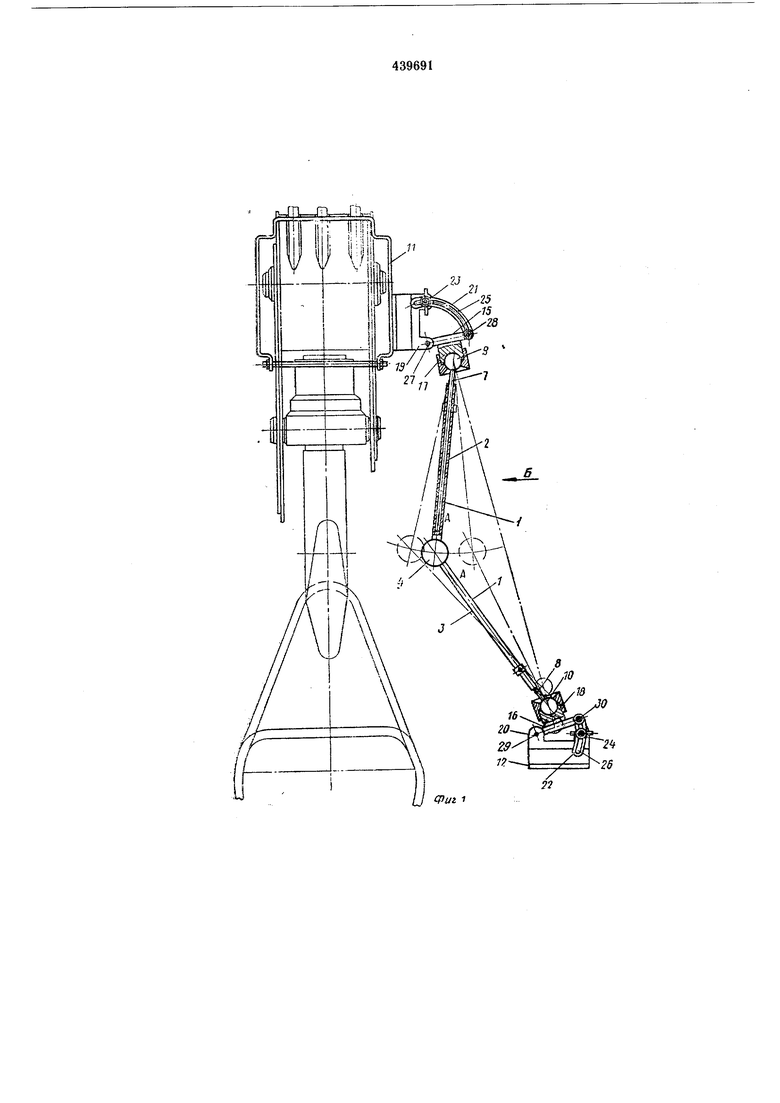
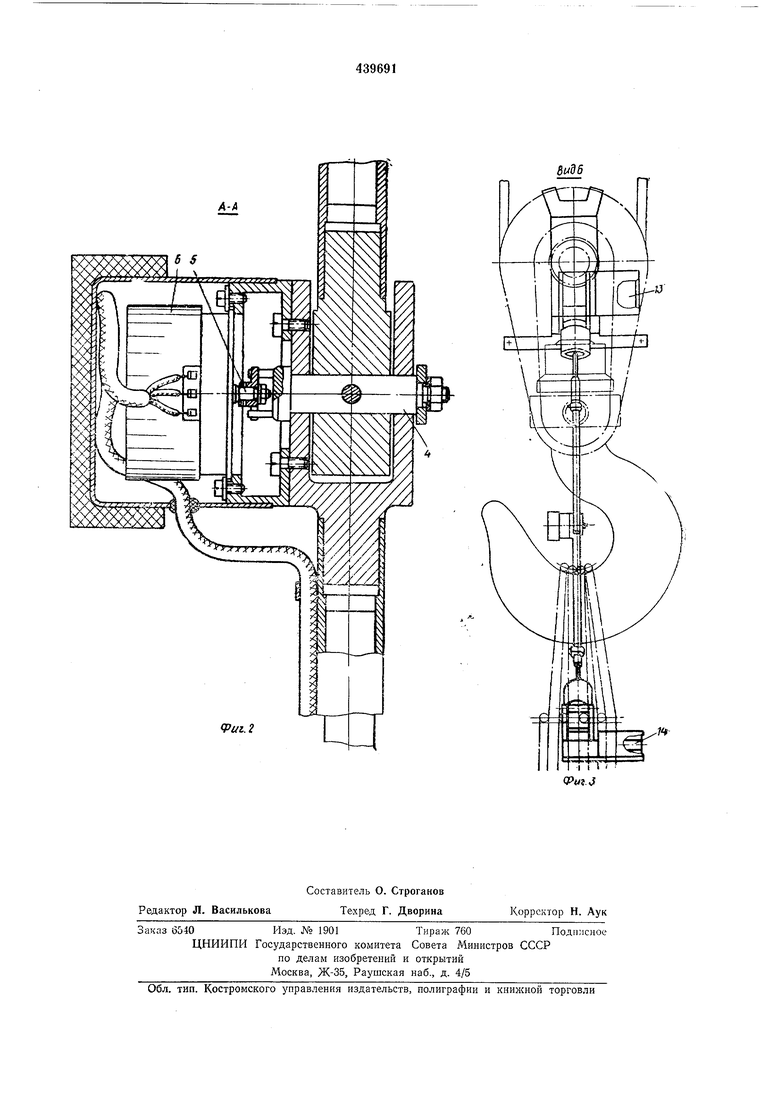
На фнг. 1 изображено предлагаемое устройство, общий .вид; на фиг. 2 - разрез но Л-Л на фиг. 1; на фиг. 3 - вид ио стрелке Б на фиг. 1.
5 Устройство для коитроля положеиия груза нри его нодъеме содержит двузвеин.нк 1, между звеньями 2 и 3 которого встроен соединнтельный шарнир 4, связанный с подвижной частью 5 регистрирующего нрнбор а 6, выпол0 иенного в виде потенщюметрического датчика н указателя (на чертеже не показан), штанги 7 и 8, служащие для регулировання длины звеньев 2 и 5 и соединенные через шаровые шарниры 9 н 10 с захватами 11 н 12, а
5 установленные на захватах электромагнитные расценители 13 и 14.
Захваты 11 и 12 выполнены в виде шарнирио соединенных трех элементов: поворотных платформ 15, 16, жестко соединенных с осно0 ваниямн 17, 18 шаровых шарниров 9, 10, планок 19, 20, закрепленных неподвнжно на грузе и подъемном устройстве, и планок 21, 22, изменяющнхся по длине. Для этого иланки 19, 20 снабжены фиксаторами 23 и 24 соответст5 веиио, из которых фиксатор 23 вставлен в паз 25 планки 21, а фиксатор 24 - в паз 26 планки 22. Пазы 25 и 26 имеют форму дуг окружиостей с радиусами, равными длинам нлатформ 15 и 16, между шарнирами 27 и 28,
0 29 и 30, соответственно.
Предлагаемое устройство работает следующим образом.
Заранее подвешенный к подъемному устройству (на чертеже не показан) с помощью захвата 11 двузвенник 1 прикрепляют затем к грузу захватом 12. Место присоединения захвата 12 к грузу выбирают установкой длины и углового положения звеньев 2 и 3 согласно заданному диапазону измерений. Изменение углового положения и длины звеньев 2, 3 двузвенника производят поворотом платформ 15, 16 вокруг шарниров 27 и 29 соответственно н выдвижением штанг 7 и S. Наличие на захватах 11 II 12 электромагнитных расценителей 13, 14 сокращает время установки н настройки устройства и, кроме того, повышает безопасность отсоединения на больших высотах звена 3 двузвенника от груза.
После окончательного присоединения двузвенника / к грузу оттягивают с помощью подъемного устройства крепежный строп (на чертеже не показан) и показания указателя регистрирующего прибора в этот момент принимают за исходное положение.
В момент отрыва груза от земли, ири новороте его на некоторый угол, лежащий в горизонтальной плоскости, происходит изменение углового положения звеньев 2 и 5 двузвенника, что вызывает поворот шарнира 4, связанного с подвижной частью 5 регистрирующего прибора. Угол поворота груза относительно оси подъемного устройства, а также рассогласование скоростей горизонтального передвижения подъемника измеряют ио указателю регистрирующего прибора. Аналогично измеряют угол поворота груза в вертикальной плоскости. Применение регистрируюш,его прибора 6 в виде потенщюметрического датчика обеспечивает дистанционное измерение контролируемых углов, определяющих относительное положение груза и подъемного устройства.
Предмет изобретения
1.Устройство для контроля положения груза ири его подъеме (одним или несколькими подъемными устройствами), содержащее двузвенник, регистрирующий прибор и захваты, отличающееся тем, что, с целью повышения производительности труда и упрощения измерений, оба эвена вынолиены регулируемыми по длине, снабжены на концах шаровыми шарнирами для прикрепления к захватам; а между звеньями встроен соединительный шарнир с приспособлением для измерения величины угла между звеньями.
2.Устройство ио н. 1, отличающееся тем, что захваты, закрепленные на грузе и на подъемном устройстве, выполнены в виде шарнирно соединенных трех элементов, к одному из которых шарнирно прикреплено звено двузвенника, второй выполнен изменяемым по длине, а третий элемент закреплен неподвижно на грузе или подъемиом устройстве.
Pui.2
5w96
-ГФ
у
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1980 |
|
SU919804A1 |
| УСТРОЙСТВО для ОПРЕДЕЛЕНИЯ УСИЛИЙ В ТАКЕЛАЖНОЙ ОСНАСТКЕ ГРУЗОВОЙ ПОДНОРКИ | 1970 |
|
SU284438A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСИЛИЯ НАТЯЖЕНИЯ КАНАТА ГРУЗОПОДЪЕМНОГО МЕХАНИЗМА (ВАРИАНТЫ) | 2006 |
|
RU2326802C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСИЛИЯ НАТЯЖЕНИЯ ГРУЗОВОГО КАНАТА ГРУЗОПОДЪЕМНОГО МЕХАНИЗМА | 2005 |
|
RU2287478C1 |
| УСТРОЙСТВО ДЛЯ СЪЕМКИ СЕЧЕНИЙ КАМЕРНЫХ ВЫРАБОТОК | 2011 |
|
RU2469268C1 |
| ПРИБОР ДЛЯ ДЕМОНСТРАЦИИ ДЕЙСТВИЯ КОРИОЛИСОВОЙ СИЛЫ ИНЕРЦИИ | 1991 |
|
RU2016420C1 |
| Устройство для проводки троса подо льдом | 1988 |
|
SU1581245A1 |
| Лесозаготовительная машина | 1988 |
|
SU1782465A1 |
| Сочлененное транспортное средство | 1987 |
|
SU1477586A1 |
| ТРАВЕРСА ГОРИЗОНТАЛЬНОЙ СТЫКОВКИ, БЛОК ЗАДАНИЯ НАГРУЗКИ МЕХАНИЗМА БАЛАНСИРОВКИ ТРАВЕРСЫ, БЛОК КОМПЕНСАЦИИ ВЕКТОРА НАГРУЗКИ МЕХАНИЗМА БАЛАНСИРОВКИ ТРАВЕРСЫ, СПОСОБ НАСТРОЙКИ БАЛАНСИРОВКИ ТРАВЕРСЫ | 2008 |
|
RU2374164C1 |