1
Изобретение может быть при- манено для автоматического регу лйрования работы насадочных аппаратов в интенсивных гидродинамических режимах в различных про- 5 цессах химической технологии.
Известно устройство для автоматического регулирования насадочного абсорбера, состоящее из регулятора возмущающего ю действия и клапана для подачй абсорбента, где в качестве регулятора возмущающего воздействия применен регулятор перепада давления с корректирующими по соот- 15 ношению нагрузок абсорбента и газа блоками динамической компенсации, функционального в сум- мирующего.
Недостатком этого устройства 20 является зависимость его динами- ческих характеристик и параметроБ настроек регулятора от переменных параметров объекта, что
делает неустойчивой его работу. ; 25
Цель изобретения заключается в обеспечении устойчивой работы устройства автоматического регу лйрования насадочных колонн.:неЗависимо от их переменных пара метров.
Для этого предлагаемое устройство снабжено контуром адаптации, состоящим из модели объекта, блока компенсации контура адапта- ций, элемента сравнения, исполнительного элемента адаптации и блока перемножения.
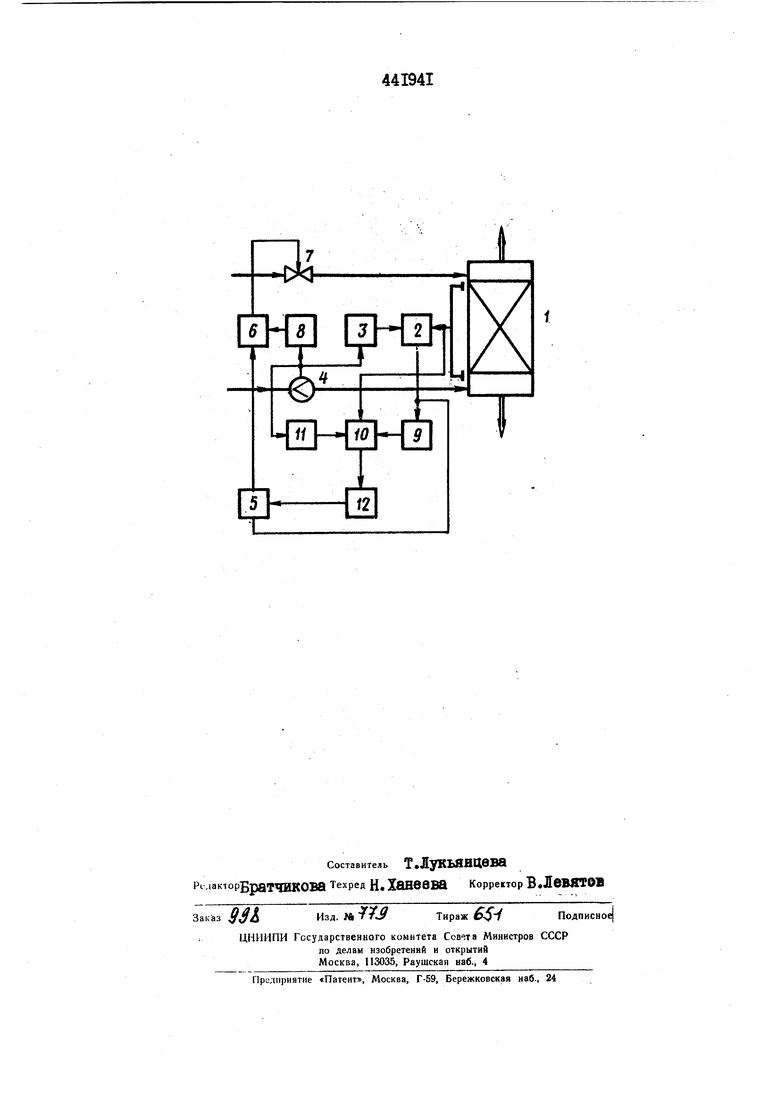
На чертеже изображена схема предложенного устройства.
Основной контур включае в себя насадочную колонну I, регулятор перепада давления 2, функцщональный блок 3, реализующий известную для данного аппарата зависимость перепада давления от в агрузкй по газу, измеряемого датчиком 4, блок перемножения 5, суммирующий блок б, регулирующей клаijiaH 7, изменяющий пода расхвора It блок диваыической коыйвнсёцйи 8. iКонтур адаптации включает модель объекта 9, элемент сравнения 10, блок компенсации изменения нагруз :ки контура адаптации II и исцолни -bj- тельный элемент контура адаптаtn л we. и Т-ТТя о TTOkf АТЗШ НИТТЧЛ л ТТП4 л - ции 12. Устройство работает следующим образом.. ЮМ.., . . . ГТ.Н.М «..г«.v:.«;: v L. изменениинаг|)узки в колонне 1 изменяется перепад давлени на насадке, одновременно ввиду нелинейности объекта изменяются его линейности объекта изменяются его „ динамические характеристики. Сигнал отклонения перепада давления поступает на регулятор перепада давления 2, где он сравнивается с заданным значением, поступающим от функционального блока 3., и вырабатывается управляющее воздействие, поступающее через бло перемножения ь {Л суммирующий блок 6 на регулирующий клепан , изменяющий подачу раствора. Одновременно сигнал отклонения перепада давления поступает на элемент сравнения 10 контура адаптации, в которой его сравнивают с сигналом, поступающим с выхода модели объекта у, далее W .V.UU MiVy WiUJCJ WWXfWXbJ.U f сигнал рассогласования поступает н исполнительный элемент контура адаптации 12 и блок перемножения 5 в котором перестраиваемся коаффий1иент усиления осн15:вя6Тд кЬнту ра в соответствии с изменившимися динамическими характеристиками объекта. Одновременно при изменении нагруз,ки сигнал от датчика нагрузки 4 по--- ,4uj.-ijuuM 4Qi. ujа&а ч- ii jступает на блок динамической комI ЛФЛТПОвП но Лтгчт -„г.,, ,пенсации S, оказывающий опережаюре воздействие через суммирующий lOaoK 6 на регулирующий клапан у. i Q гт пттугт м. . также поступает на блок компенсации контура адаптации II, сигнал которого суммируется в элементе сравнения Ю с сигналом модели объекта 9 и сравнивается с текущим значением перепада давления. ПРЕДМЕТ ИЗОБРЙТКНйЯ Устройство для автоматического регулирования насадочных колонн, содержащее регулятор перепада давления, функциональный и суммирующий блоки,блок динамической компенсвг ции, клапан подачи раствора, отличающееся тем,что, с целью обеспечения устойчивой работы-, оно снабжено контуром адаптации, состоящим из модели объекта. ФЯТТИИГ ЛО ГПЛСТПТ ГД1 ГЖП «««ч-п ъ. блока ком1шнс ™икпн п2 Йп® блока КОМПЙНПЯПИИ wnnmwno о-ппт ™ пии ялй1 S ° nf и блока аеремн жеай 
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления колонной с подвижной насадкой | 1979 |
|
SU975026A1 |
| Устройство управления абсорбером с псевдоожиженной насадкой | 1988 |
|
SU1699483A1 |
| Адаптивная система управления для объектов с изменяющимся запаздыванием | 1984 |
|
SU1191884A1 |
| Система автоматического регулирования | 1982 |
|
SU1084735A1 |
| Самонастраивающаяся система управления | 1983 |
|
SU1153314A1 |
| Адаптивная система управления с нестационарным упругим механическим объектом | 1984 |
|
SU1188697A1 |
| Устройство управления многоприводной подъемно-транспортной установкой с гибким тяговым органом | 1986 |
|
SU1425141A1 |
| Устройство для определения частотных характеристик динамических объектов | 1977 |
|
SU744474A1 |
| Самонастраивающаяся система управления с эталонной моделью | 1980 |
|
SU877471A1 |
| Самонастраивающаяся система управления | 1983 |
|
SU1158974A1 |