Изобретение относится к области автоматического управления многоприводными подъемно-транспортными установками.
Целью изобретения является расширение функциональных возможностей при управлении многоприводной уст.а. новкой с числом приводов более двух ().
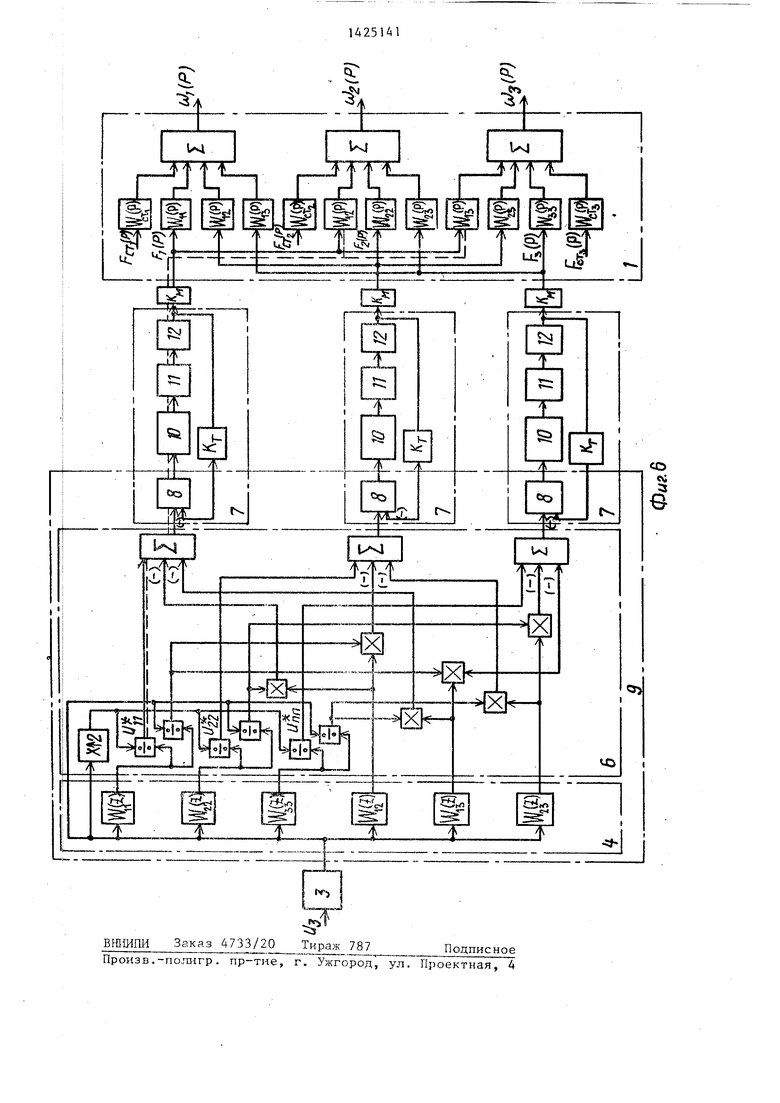
На Фиг1 представлена структурная схема многоприводной подъемно-транспортной установки; на фиг.2 - функци- ональная схема устройства; на фиг.З - структурная схема цифрового корректи |5 рующего устройства (ЦКУ); на фиг.4 - функциональная схема блока одновременного формирования передаточньк функций; на фиг.З - функциональная схема блока формирования сигналов за-20 Дания контуров регулирования тока; на фиг.6 - структурная схема устройства.
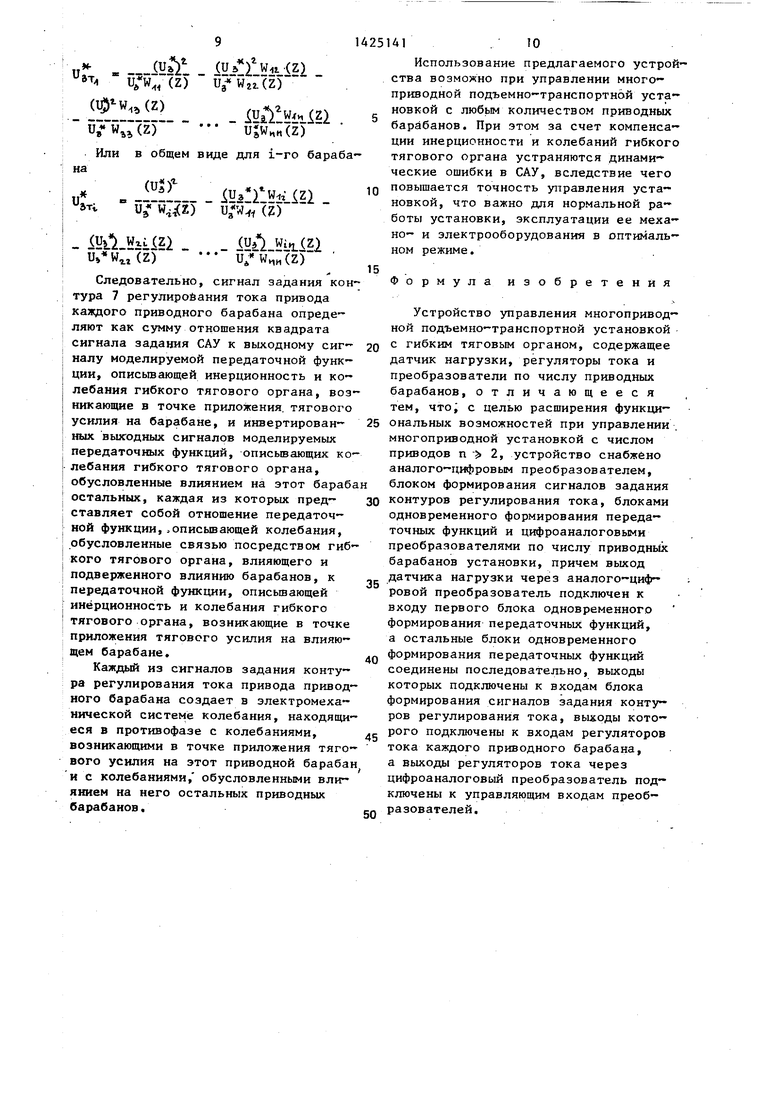
На фиг.1 обозначены: F(P),Fi(P) и Fj (Р) - приложенные тяговые усилия 25 со стороны приводных двигателей; FCT (Р), FCT (Р) и РСТ„ (Р) статические усилия со стороны нагрузки на приводных барабанах; WCT(P), WCT (Р) и WCT СР) передаточные функции, опи- ЗО сывающие колебания гибкого тягового органа при .ступенчатом приложении статической нагрузки; W(P), (Р) и W(Р) - передаточные функции, опи- сьюающие инерционность установки и колебания гибкого тягового органа, возникающие р точках приложения тяговых усилий на приводные барабаны; (Р), Ч,„ (Р) и ) - передаточ- ные функции, описывающие колебания, Q обусловленные взаимовлиянием приводных барабанов.
Частота вращения каждого приводного барабана многоприводной подъемно- д транспортной установки с гибким тяговым органом определяется путем решения системы уравнений, составленных для . каждой из соответствующих координат
50
по общей схеме Лангранжа
О,
d ЭТ ОП ЭА dt ОХ ЭХ ОХ
и имеет вид
J(P)PXj(P)F,(P)-g-----..
.
+ F, (P)
VH--V
V . я
s: У V
- FjP), + F,,(P)™--.
Следовательно, передаточнЬге функции структурной схемы конвейера могут быть представлены в общем виде
Wji;()
t-o
(--t
где W-i, и - коэффициенты, определяемые параметрами упругой механической системы.
Или после Z-преобразования
S: Kiz-
«,ч W :
Поэтому .
W(P) F, (P)W,,(P)F(P).W,(P) + ...- + F(P)W,(P) + FC (P)WeKv,/P) W(P) Fi(P)W.., (P) + F (P)W (P) + ... F« (P)(P) + F (P)WcK,JP) W(P) 7(P) (P) + F (P)W, (P) +
+ F (P)W2(P) + .. .+Fcvn(P)W5,vt,(P)
) Хг(Р) и X(P) - перемещения в соответствующих точках.
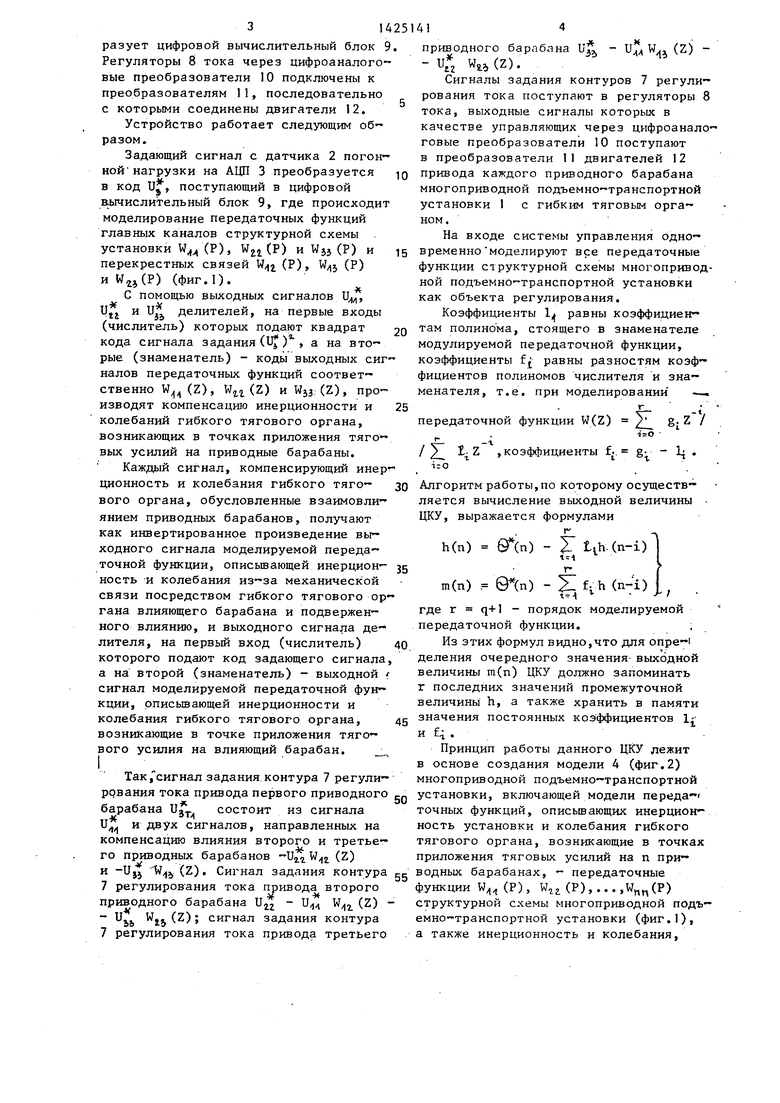
Устройство управления многопривод- ной подъемно-транспортной установкой 1 с гибким тяговым органом (фиг.2) содержит датчик 2 нагрузки, подсоединенный через аналого-цифровой преобра зователь (АЦП) 3 к модели 4 многоприводной подъемно-транспортной установки как объекта регулирования, состоящей из последовательно соединенных блоков 5 одновременного формирования передаточных функций структурной схемы (фиг.1) установки. Количество блоков 5 равно порядку полиномов моделируемых передаточных функций. Выходы блоков 5 соединены с узлом 6 формирования сигналов задания контуров 7 pef гулирования тока, который вместе с моделью 4 и регуляторами 8 тока, подключёнными на его выходе в количестве равном числу приводных барабанов, образует цифровой вычислительный блок 9 Регуляторы 8 тока через цифроаналого- вые преобразователи 10 подключены к преобразователям 11, последовательно с которыми соединены двигатели 12.
Устройство работает следующим об разом.
Задающий сигнал с датчика 2 погон ной нагрузки на АЦП 3 преобразуется в код и, поступающий в цифровой вычислительный блок 9, где происходит моделирование передаточных функций главных каналов структурной схемы установки ), () и Wjj (Р) и перекрестных связей W (Р), (Р) и (P) (фиг.1).
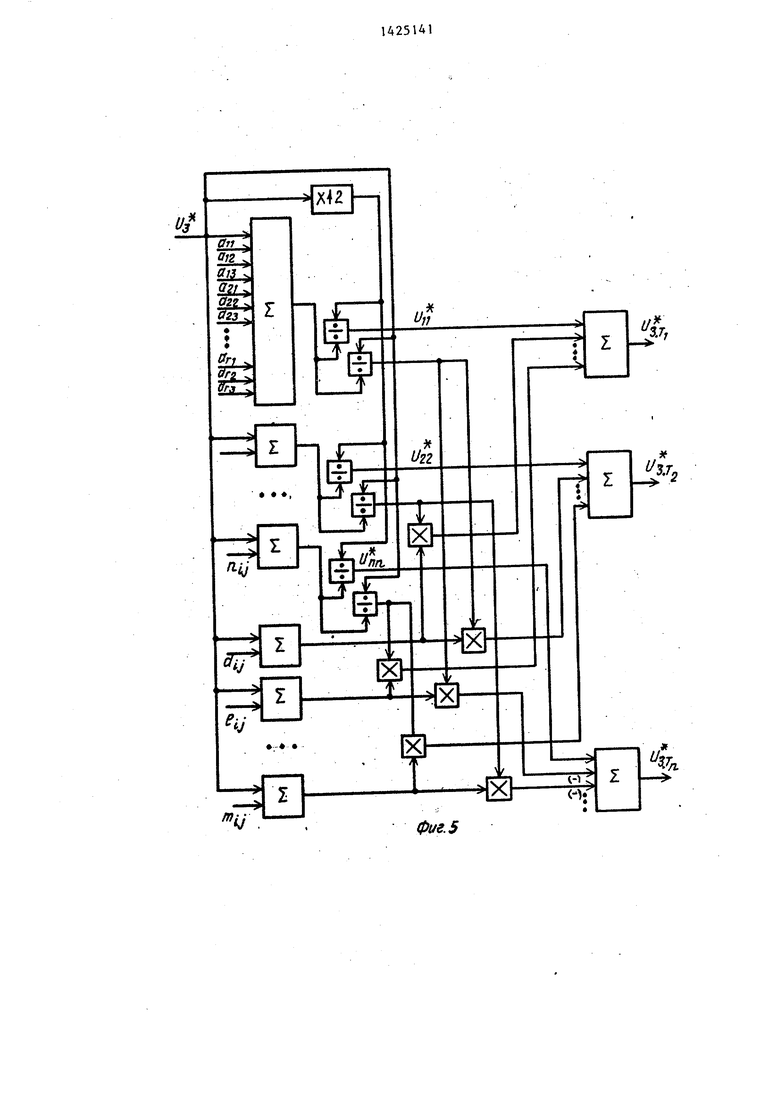
С помощью выходных сигналов Ц, Ujj и и делителей, на первые входы (числитель) которых подают квадрат кода сигнала задания (Ч ), а на вторые (знаменатель) - коды выходных сиг налов передаточных функций соответственно W(Z), . (Z) и W}3:(Z), производят компенсацию инерционности и колебаний гибкого тягового органа, возникающих в точках приложения тяговых усилий на приводные барабаны.
Каждый сигнал, компенсирующий инер ционность и колебания гибкого тяго- вого органа, обусловленные взаимовлиянием приводных барабанов, получают как инвертированное произведение выходного сигнала моделируемой передаточной функции, описывающей инерцион- ность и колебания из-за механической связи посредством гибкого тягового органа влияющего барабана и подверженного влиянию, и выходного сигнала делителя, на первьм вход (числитель) которого подают код задающего сигнала а на второй (знаменатель) - выходной сигнал моделируемой передаточной функции, рписьшающей инерционности и колебания гибкого тягового органа, возникающие в точке приложения тягового усилия на влияющий барабан.
I
Так,сигнал задания контура 7 регулирования тока привода первого приводного барабана U|L состоит из сигнала и. и двух сигналов, направленных на компенсацию влияния второго и третьего приводньк барабанов U . (Z) и -Ujj (Z). Сигнал задания контура 7 регулиров ания тока привода второго приводного барабана U - U W (Z) - Ujj Wjj (Z) ; сигнал задания контура 7 регулирования тока привода третьего
приводного барабана UJ - W, (Z) - 1г Ww(Z).
Сигналы задания контуров 7 регулирования тока поступают в регуляторы 8 тока, выходные сигналы которых в качестве управляющих через цифроанало- говые преобразователи 10 поступают в преобразователи 11 двигателей 12 привода каждого приводного барабана многоприводной подъемно-транспортной установки 1 с гибким тяговым органом.
На входе системы управления одновременно моделируют все передаточные функции структурной схемы многоприводной подъемно-транспортной установки как объекта регулирования.
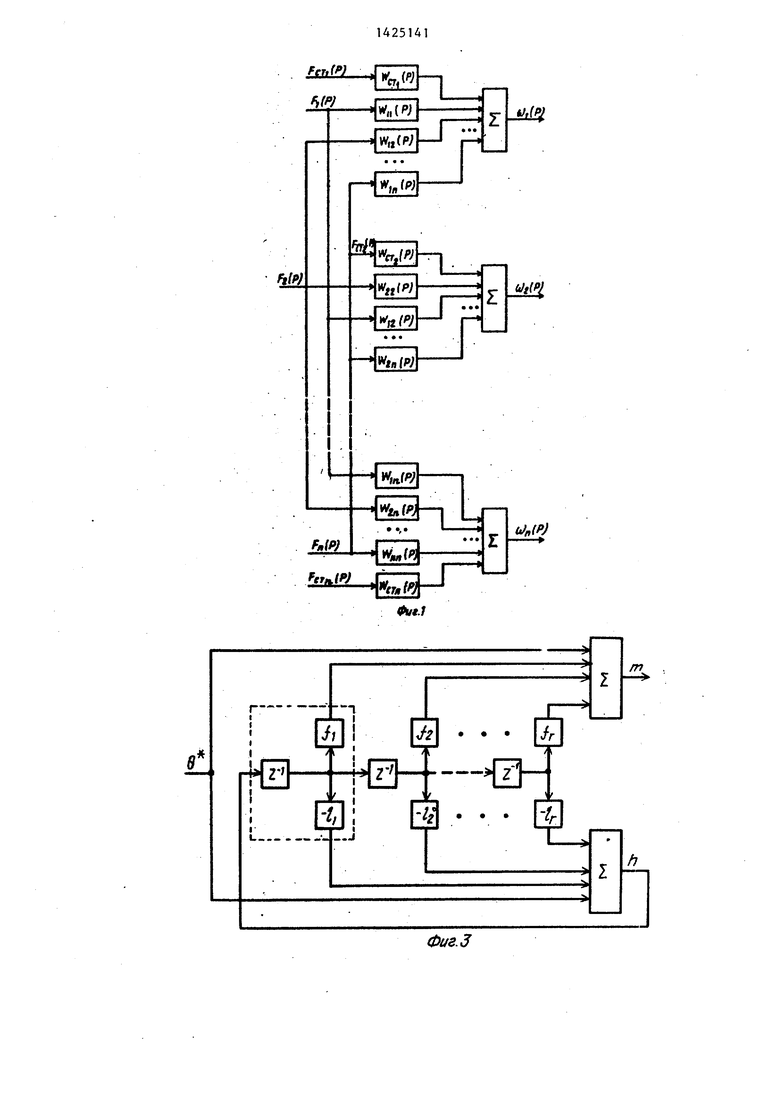
Коэффициенты 1 равны коэффи1;иен- там полинома, стоящего в знаменателе модулируемой передаточной функции, коэффициенты fj равны разностям коэффициентов полиномов числителя и знаменателя, т.е. при моделировании --.
передаточной функции W(Z) 2 §Z /
-
/2 1 Z , коэффициенты f, g- - 1 .
Алгоритм работы,по которому осуществляется вычисление выходной величины ЦКУ, выражается формулами
г h(n) 0(п) - г (n-i)
л
m
(n) . 0(n) - g;f.h(n-i)|
где г q+1 - порядок моделируемой передаточной функции.
Из этих формул видно,что для опре-I деления очередного значения- выходной величины га(п) ЦКУ должно запоминать г последних значений промежуточной величины h, а также хранить в памяти значения постоянных коэффициентов и f .
Принцип работы данного ЦКУ лежит в основе создания модели 4 (фиг.2) многоприводной подъемно-транспортной установки, включающей модели переда- точных функций, описьшающих инерцион- ность установки и колебания гибкого тягового органа, возникающие в точках приложения тяговых усилий на n приводных барабанах, передаточные функции W (Р), W(Р),...,У„„(Р) структурной схемы многоприводной подъемно-транспортной установки (фиг.1), а также инерционность и колебания.
обусловленные взаимовлиянием приводных барабанов, - передаточные функции
W-li (Р). W,5 (Р),
) г(Р),
в точках приложения тяговых усилий, равно количеству п приводных барабанов, а количество передаточных функ
24 (Р) 2 (Р) ,... ,Wj..(P) . Пере- g ций, описьшающих инерционность устадаточные функции (P), ,.(), (P) характеризуют колебания тягового органа при ступенчатом приложении статической нагрузки. В реальных условиях статическая нагрузка 10 прикладывается до начала движения, поэтому колебания тягового органа, вызванные приложением статической нагрузки, затухают до начала переходного процесса, и в дальнейшем в.процессе движения статическая нагрузка подъемного механизма практически не изменяется, а изменение статической нагрузки конвейера происходит плавно, и ступенчатое изменение невозможно, Статическое усилие определяется по
новки и колебания, обусловленные взаимовлиянием приводных барабанов, равно числу сочетаний из п по 2, т.е. п(п-)/2, так как влияние, например, первого барабана на второй равно влиянию второго на первый и описывается одной передаточной функцией W (Р) структурной схемы многоприводной подъемно-транспортной установки (фиг.1). Следовательно, выходной L сигнал смоделированной дискретной передаточной функции W(Z) используется дляформирования корректирующих сигналов как для системы управления при 20 водом первого приводного барабана,так и для системы управления приводом второго барабана.
15
интегралу скользящего ,k -C.yY
а +
iP
t где а и К - постоянные коэффициенты; t - фиксированный момент вре мени;
длина пути транспортирования груза;
V - средняя скорость транспортирования;погонная нагрузка.
Погонная нагрузка конвейера q. 25 непостоянна, так как поступающий на конвейер грузопоток во времени изменяется. Поэтому погонная нагрузка представляется как произведение номинального значения погонной нагрузки
30 и кратности нагрузки Л., равной отнощению текущего значения погонной - нагрузки конвейера q к номинальному Чгр Л гри Значение погонной нагрузки и его квадрат входят в состав
.(P), (P),...,W,,.(P) при on- 35 коэффициентов полиномов числителя и тимизации динамических режимов не учи- знаменателя передаточных функций .
структурной схемы конвейера (фиг,1). С учетом кратности нагрузки Я указанные коэффициенты полиномов могут i
Игр
Поэтому передаточные функции
тьюаются.
Моделируемые передаточные функции.
Ml имеют общий знаменатель2Гс 2 . Сле- 40 быть выражены следующим образом:
-1 0JW-1 Я-гД - - it.X + JWij ;
довательно, представляется возможным
моделировать все передаточные функции i f ,с помощью одного ЦКУ, в котором в от- I
личие от ЦКУ, моделирующего одну пере- Поэтому, в случае использования
даточную функцию (фиг.З), вместо ко- данного устройства при управлении
эффициентов f вводится последовательность коэффициентов, равных разностям коэффициентов полиномов числителей модулируемых передаточных функций, и соответствующих коэффициентов полинома общего знаменателя этих функций. Количество кобффициен- тов, вводимых вместо каждого коэффициента равно количеству моделируемых передаточных функций. Количество передаточных функций, описьшающих инерционность установки и колебания гибкого тягового органа, возникающие
50
55
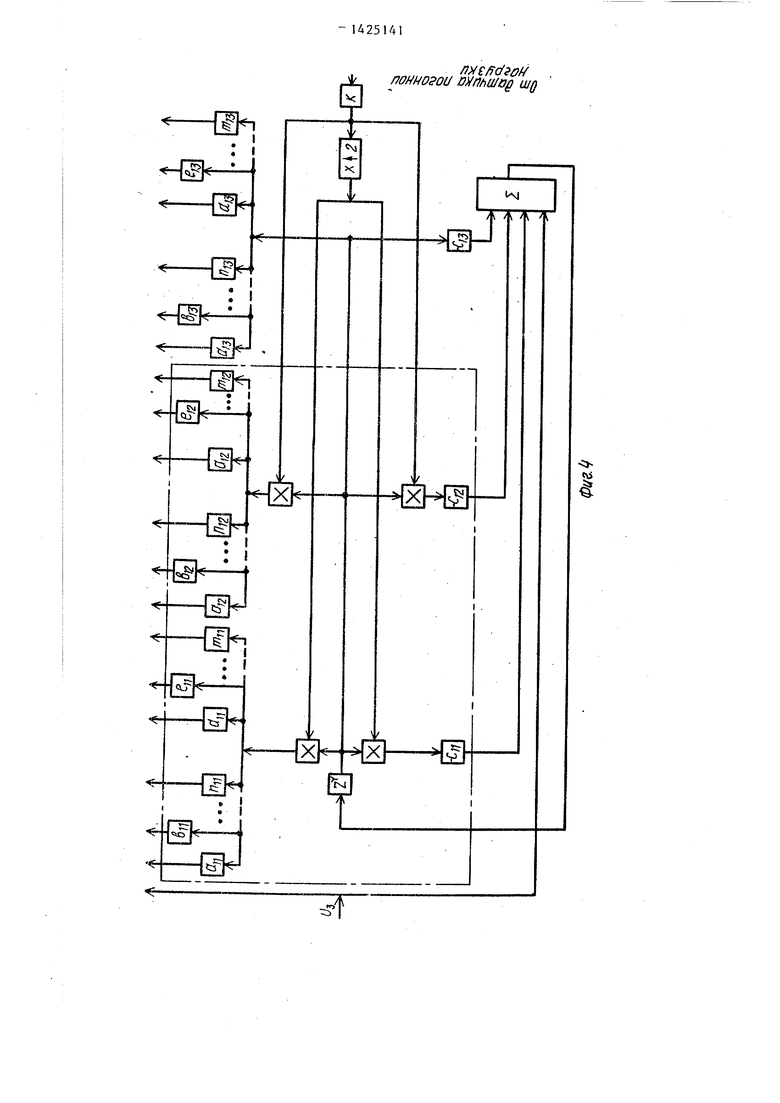
конвейерной установкой для максимальной идентификации модели объекту регулирования параметры моделируемых передаточных функций формируют адаптивными к изменению погонной нагруз- ки. Для этого блок 5 одновременного формирования моделируемых передаточных функций структурной схемы (фиг.1) установки содержит узел, обеспечивающий адаптацию моделируемых передаточных функций к изменению погонной нагрузки конвейерной установки (фиг.4).
в точках приложения тяговых усилий, равно количеству п приводных барабанов, а количество передаточных функ
ций, описьшающих инерционность уста
новки и колебания, обусловленные взаимовлиянием приводных барабанов, равно числу сочетаний из п по 2, т.е. п(п-)/2, так как влияние, например, первого барабана на второй равно влиянию второго на первый и описывается одной передаточной функцией W (Р) структурной схемы многоприводной подъемно-транспортной установки (фиг.1). Следовательно, выходной L сигнал смоделированной дискретной передаточной функции W(Z) используется дляформирования корректирующих сигналов как для системы управления при водом первого приводного барабана,так и для системы управления приводом второго барабана.
Погонная нагрузка конвейера q. непостоянна, так как поступающий на конвейер грузопоток во времени изменяется. Поэтому погонная нагрузка представляется как произведение номинального значения погонной нагрузки
данного устройства при управлении
конвейерной установкой для максимальной идентификации модели объекту регулирования параметры моделируемых передаточных функций формируют адаптивными к изменению погонной нагруз- ки. Для этого блок 5 одновременного формирования моделируемых передаточных функций структурной схемы (фиг.1) установки содержит узел, обеспечивающий адаптацию моделируемых передаточных функций к изменению погонной нагрузки конвейерной установки (фиг.4).
714251418
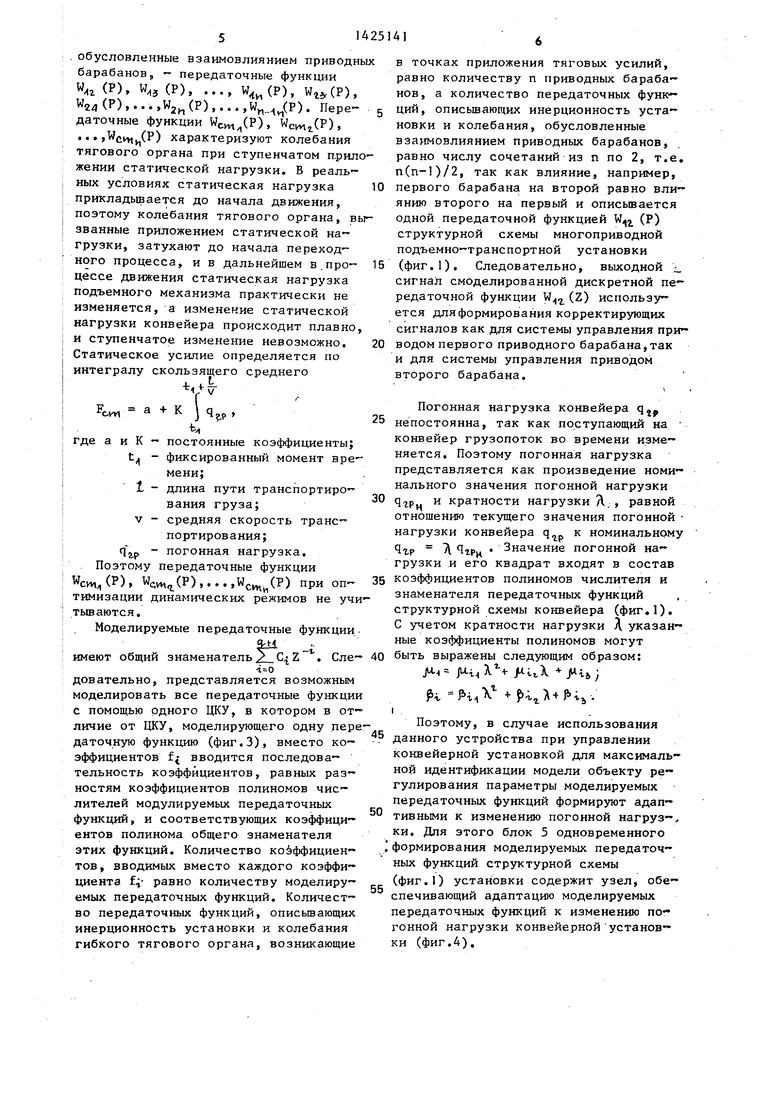
Коэффициенты моделируемых переда- ся в виду передаточные функции W (Р) точных функций в общем виде К (Р),...,W(P) (фиг.1). Будучи + + К J и С, f соединенными последовательно, пере- + С;,7 + C li рассчитьшают-из условия даточная функция структурной схемы номинальной загрузки конвейерного объекта регулирования и соответствую- полотна СХ 1) и заносят в память щая ей моделируемая передаточная функ- блока одновременного формирования ция взаимно компенсирует друг друга, моделируемых передаточных функций Но так как на входе системы управле- структурной схемы установки номиналь ю ния для сохранения одного знаменателя ные значения коэффициентов Kj , К , всех моделируемых передаточных функ KI,, , С , С и . Сигнал с датчи - ций, что значительно упрощает техниче- ка погонной нагрузки через аналого- скую реализацию способа, а именно: цифровой преобразователь, поступает позволяет моделировать все передаточ-- в блок 5 одновременного формирования 15 ные функции с помощью одного цифрового моделируемых передаточных функций, корректирующего устройства, моделируют где код этого сигнала умножается на передаточные функции не обратные коэффициент К, равный обратной передаточным функциям объекта регули- чине кода сигнала, соответствующего рования (Р) , а равные им, то для номинальной погонной нагрузке, за получения выходного сигнала обрат- чего становится численно равным крат- ной передаточной функции, т.е. 1/ ности нагрузки Л . Полученная таким (Z), выходной сигнал (Z) образом кратность нагрузки умножается моделируемой передаточной функции на коэффициенты для формиро- (Z) подают на второй вход (знаме- . вания передаточной функции W.(Z); 25 натель) делителя, на первый вход Ь - для формирования (Z); п - (числитель) которого подают квадрат для формирования W (Z) ; d - для кода задающего сигнала (U, ) . .формирования передаточной функции взаимовлияния приводных бара- W (Z) ; 1 - для формирования (Z) ; банов, выраженного передаточными т - для формирования (2), Квад- 30 функциями (Р) , W,, (Р) ,... ,W(P) , рат кратности нагрузки умножается на W2.,(P) ,... ,Wj| (Р) перекрестных коэффициенты К{.,связей структурной схемы многоприводТакие же операции производят с ког ной подъемно-транспортной установки эффициентами знаменателя моделируемых (фиг.1), передаточная функция, моде передаточных функций С. лирующая инерционность и колебания
Блок 5 одновременного формирования гибкого тягового органа в точке при- моделируемых передаточных функций ложения тягового усилия на барабан, соответствует выделенной пунктирной оказьшается последовательно соединен- линией части ЦКУ, моделирующего одну ной с.каждой из передаточных функций, передаточную функцию (фиг.З). Порядок до выражающих механическое влияние этого моделируемой передаточной функции барабана на остальные (фиг.6), На определяет количество таких блоков. каждом приводном барабане влияние ос- Сигналы К| и С поступают в узел 6 тальных (механическое и вызванное формирования сигналов задания U введением моделей) передаточных функ- для контура 7 регулирования тока ций, компенсирующих инерционность и вода каждого приводного барабана колебания гибкого тягового органа, (звездочкой отмечен дискретный харак- возникающие в точках приложения тяго- тер величины).вых усилий на приводные барабаны.
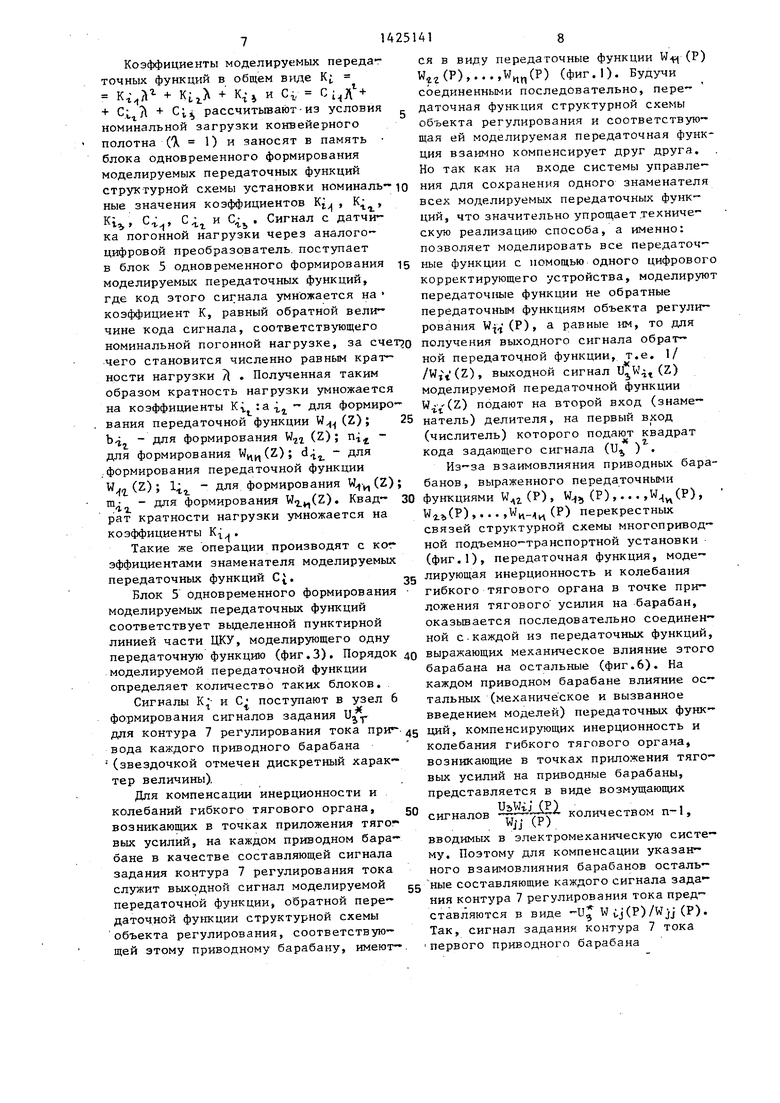
Для компенсации инерционности и представляется в виде возмущающих колебаний гибкого тягового органа, с/ч UbWij (Р),
возникающих в точках приложения тяго- сигналов количеством п-1,
вых усилий, на каждом приводном бара- вводимых в электромеханическую систе- бане в качестве составляющей сигналаму. Поэтому для компенсации указан- задания контура 7 регулирования токаного взаимовлияния барабанов осталь- служит выходной сигнал моделируемой gg ные составляющие каждого сигнала зада передаточной функции, обратной пере-ння контура 7 регулирования тока пред- даточной фуьжции структурной схемыставляются в виде -U W vj(P)/Wjj (Р). объекта регулирования, соответствую-Так, сигнал задания контура 7 тока щей этому приводному барабану, имеют-, первого приводного барабана
(UiYwiiCzi
VW22.(Z)
ufwH«(z)
иде для i-ro бараба-
(2)
I - yu.Wi (22 ( WtT.(z2 I u,w«(z) )
Следовательно, сигнал задания контура 7 регулиройания тока привода ; каждого приводного барабана опредв ляют как сумму отношения квадрата I сигнала задания САУ к выходному сиг- I налу моделируемой передаточной функ I ции, описьшающей инерционность и ко лебания гибкого тягового органа, воз никающие в точке приложения, тягового усилия на барабане, и инвертирован 1 ных выххэдных сигналов моделируемых ; передаточных функций, описьшающих лебания гибкого тягового органа, i обусловленные влиянием на этот бараба i остальных, каждая из которых пред- ; ставляет собой отношение передаточ- I ной функции,.описывающей колебания, обусловленные связью посредством гиб- I кого тягового органа, влияющего и подверженного влиянию барабанов, к передаточной функции, описьшающей j инерционность и колебания гибкого тягового органа, возникающие в точке приложения тягового усилия на влияющем барабане.
Каждый из сигналов задания контура регулирования тока привода приводного барабана создает в электромеханической системе колебания, находящиеся в противофазе с колебаниями.
возникающими в точке приложения тягового усилия на этот приводной барабан и с колебаниями, обусловленными влиянием на него остальных приводных барабанов,
425141 .10
Использование предлагаемого устройства возможно при управлении многоприводной подъемно-транспортной установкой с количеством приводных барабанов. При этом за счет компенсации инерционности и колебаний гибкого тягового органа устраняются динамические ошибки в САУ, вследствие чего Q повышается точность управления установкой, что важно для нормальной работы установки, эксплуатации ее меха- но- и электрооборудования в оптимальном режиме.
Формула изобретения
Устройство управления многоприводной подъемно-транспортной установкой с гибким тяговым органом, содержащее датчик нагрузки, регуляторы тока и преобразователи по числу приводных барабанов, отличающееся тем, что; с целью расширения функциональных возможностей при управлении . многоприводной установкой с числом приводов п - 2, устройство снабжено аналого-цифровым преобразователем, блоком формирования сигналов задания контуров регулирования тока, блоками одновременного формирования передаточных функций и цифроаналоговыми преобразователями по числу приводнь1х барабанов установки, причем выход датчика нагрузки через аналого-цифровой преобразователь подключен к входу первого блока одновременного формирования передаточных функций, а остальные блоки одновременного формирования передаточных функций соединены последовательно, вькоды которых подключены к входам блока формирования сигналов задания контуров регулирования тока, выходы которого подключены к входам регуляторов тока каждого приводного барабана, а выходы регуляторов тока через цифроаналоговый преобразователь подключены к управляющим входам преобразователей.
FeT.(f)
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления двухбарабанным ленточным конвейером | 1984 |
|
SU1286474A1 |
| Способ управления многоприводной подъемно-транспортной установкой с гибким тяговым органом | 1981 |
|
SU1089014A1 |
| Устройство для управления много-пРиВОдНОй пОд'ЕМНО-ТРАНСпОРТНОйуСТАНОВКОй C гибКиМ ТягОВыМ ОРгА-HOM | 1979 |
|
SU800052A1 |
| Устройство для управления многобарабанной, подъемно-транспортной установкой | 1977 |
|
SU899426A1 |
| Устройство для управления многоприводной подъемно-транспортной установкой с гибким тяговым органом | 1978 |
|
SU785148A1 |
| ПОДЪЕМНОЕ УСТРОЙСТВО | 2024 |
|
RU2835700C1 |
| Устройство для управления подъемно-транспортной установкой | 1983 |
|
SU1159847A1 |
| Многобарабанный конвейер | 1984 |
|
SU1207927A1 |
| Способ определения рабочих параметров транспортирующих машин | 1968 |
|
SU441209A1 |
| Устройство для управления многоприводной подъемно-транспортной установкой | 1978 |
|
SU781144A1 |
Изобретение относится к автома тическому управлению многоприводными 1 подъемно-транспортными установками. Цель - расширение функциональных возможностей при управлении многопривод- ной установкой 1 с числом приводов более двух. Для этого устр-во снабжено АЦП 3, блоком 6 формирования сигналов задания контуров 7 регулирования тока, блоками 5 одновременного формирования передаточных функций и ЦАП 10 по числу приводных барабанов (ПБ) установки 1. К первому блоку 5 через АЦП 3 подключен выход датчика 2 нагрузки, а остальные блоки 5 соединены последовательно. Их подключены к входам блока 6. Сигналы задания контуров 7 поступают на входы регуляторов 8 тока каждого ПБ. Выходные сигналы регуляторов 8 в качестве управляющих через ЦАП 10 поступают в преобразователи 11 двигателей 12 привода каждого ПБ установки 1 с гибким тяговым органом. Блок 6 вместе с моделью 4 и регуляторами 8 образует цифровой вычислительный блок 9, где происходит моделирование передаточных функций главных каналов структурной схемы установки 1 и перекрестных связей. С помощью выходных сигналов компенсируются инерционность и колебания гибкого тягового органа, возникающие в точках приложения тяговых усилий на ПБ. 6 ил. -.7 Ш (Л 1C сд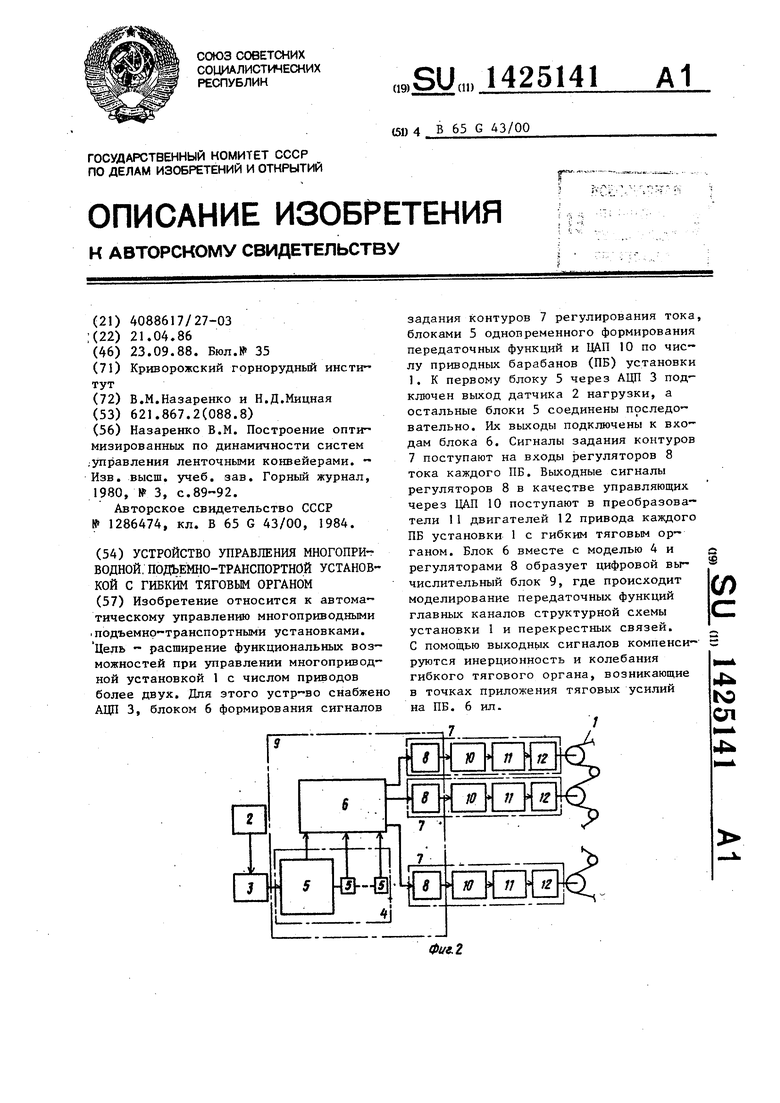
г:1
Фиг-З
n / f}d$O/ nOf HDSOU D)/nhUJOg WQ
/
(fft/e.S
| Назаренко В.М | |||
| Построение опти Мизированных по динамичности систем .управления ленточными конвейерами | |||
| Изв | |||
| высш | |||
| учеб | |||
| зав | |||
| Горный журнал, 1980, № 3, с.89-92 | |||
| Способ управления двухбарабанным ленточным конвейером | 1984 |
|
SU1286474A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
