ел
со со Изобретение относится к автомати ческому управлению и может быть использовано для згправления объектами в которых в процессе функционирования имеют место параметрические и сигнальные возмущения, например в роботостроении в системах автоматич кого управления приводами рабочих органов манипуляционньк роботов, в станкостроении в системах автс)атичеСКОРО упрёвл;енйя. приводами главного движения металлорежущих, станков, в металлэт)гии в- cHCTeMaix автомат| еского управлерия приводами пр катных станов.. Известна самонастраивающая систе ма управления, содержащая йоследовательно соединенные настраиваемый регулятор и объект, выход которого соединен с входом регулятора, а также устройство одентификахщи пе.ременньк параметров объекта, выходы которых воздействуют на настр.аиваеMbie входы регулятора 0J . Однако данная самонастраивающая система обеспечивает стабилизацию динамических свойств при управлении объектом с нестационарньшй пара метрами только при отсутствии н&чз меряемых внешних возмуиений а|ДДИтиэ ного характера, поскольку используе мые в ней устройства идентификаш рассчитаны только на объекты, не по верженные неизмеряемым в.нешним возмущениям аддитивного характера. Известна система управления переменной структуры с эталонной моделью, содержащая последовательно соединенные сумматор и объект регулирования , выход которого под-. Клночен к первсшу входу устройст ва сравнения, к второму входу которого подключен выход эталонной модеш, а выход соединен с входом первого релейного элемента и с входом блока вычисления гиперплоскости скольжения, причем выход перзвого релейного элемента подключен на первый вход первого умножителя, выход блока вь1числения гиперплоскости скольжения соединен с входом второго релейного элемента, выход которого подключен к первому входу второго блока умножения. При этом система дополнительно снабжена третьим блоком умножения, третьим и четвертым релейным элементом и тремя переключающими блоками: блоком переключе3142ния входного сигнала, блоком переключения .сигнала ошибки и блоком переключения выходного сигнала, при--чем их выходы включены .насоответствукшше входы сумматора, -а входы соответственно к входу системы, к выходу устройства сравнения и выходу объекта регулирования, причем сигнал на переключение входного сигнала поступает с выхода третьего блока умножения, на первый и второй входа KotOporo поступают сигналы с выходом второго и третьего блока реле, соответственно, причем вход третьего блока рёле подключен к-входу сястеюл сигнал на переключение ошбкк рассогласования с выхода устройства сравнения поступает с выхода BTofKjro блока умножения, на перв|йй и второй входы которого поступают с с выходов второго и четвертого блоков реле соответственно, причем вход первого блока реле подключен к выходу объекта регулирования 2J . Однако система управления переменной структуры с эталонной моделью оказывается неработоспособной при наличии иэменяюпщхся внешних возмущенйй аддитивного характера, Действующйх на объект, и при существенно нелинейных характеристиках объекта, так как она принципиально рассчитана лишь на работу при отсутствии внешних возмущений с линейным объектом. Наиболее близкой к предлагаемому является, самонастраивакщаяся система управления, содержащая последовательно соединенные сумматор и . объект регулирования, выход которого подключен к первому входу устройства сравнения, к второму входу которого подключен выход эталонной модели, а выход соединен с входом первого релейного элемента и с входом блока вычисления гиперплоскости скольжения, причем вход первого реЛейного элемента подключен на первый вход первого умножителя, выход блока вычисления гиперплоскости скольжения соединен с входом второго релейного элемента, выход которого подключен к первому входу второго блока умножения, причем первый вход сумматора является входом системы, блок усиления, вход которого соединен с выходом первого блока умноже3I
ния, .второй вход которого соединен с выходом блока сравнения, а выход блока усиления подключен на второй вход блока умножения, выход которого подключен на второй вход сумматора, первый вход которого соединен с входом эталонной модели з| .
Однако данная система оказывается работоспособной только при линейных характеристиках объекта, так как при существенных нелинейностях нарушаются условия существование скользящих режимов в системе.
Цель изобретения - расширение области применения путем обеспечения работоспособности системы в условиях существенных нелинейностей.
Поставленная цель достигается тем, что в самонастраивающуюся систему управления, содержащую сумматор, подключенный выходом к входу объекта регулирования, устройство сравнения, первый вход которого подклвочен к выходу объекта регулирования, второй вход подключен к выходу , а выход устройства сравнения соединен с входом блока релейных элементов, причем первый вход сумматора является входом системы, введены последовательно соединенные блок фильтров и инвертор, причем выход инвертора подключен к второму входу сумматора, а вход блока фильтров соединен с выходом блока релейных элементов и вторым входом мог дели, первый вход которой подключен
к выходу сумматора.
В предлагаемом устройстве удается локализовать скользящие режиьы на модели (т.е. в контуре: модель, устройство сравнения , блок релейных элементов, модель). На объект подается эквивалентный, получаеьалй с выхода блока фильтров, непрерывный сигнал противоположного знака. f.
Если в объекте есть существенные нелинейности, например, однополупериодный выпрямитель, элемент с ограничением входных сигналов с разной амплитудой для сигналов различной полярности и т.д., то в этом случае эквивалентный непрерывный сигнал свободно проходит в линейной зоне данных элементов, в то время как разрьганой сигнал подвер-, гается нелинейным искажениям н при3314 .4 .
водит систему к потере работоспособности. ,.
На чертеже изображена схема самонастраивающёй системы управления. 5 Самонастраивающая система управления содержит сумматор 1, объект 2 регулирования, устройство 3 сравнения, модель 4, блок 5 релейных элементов, блок 6 фильтров и инвертор 7.
Самонастраивающаяся система управления работает следующим образом.
Задающий сигнал, являющийся управJ5 .ляющнм сигналом для объекта, подается на первый вход сумматора 1, с выхода ксторого сигнал одновременно поступает на вход объекта 2 и модели 4. При совпадении динамических
20 свойств объекта и модели сигналы, поступающие на первый и второй входы сравнивающего устройства, равны и поэтому сигнал с выхода сравнивающего устройства 3 равен нулю.
25 Контур адаптации отключен.
Предположим, что вследствие каких-либо причин (например, сигнальных или параметрических возмущений} выходной сигнал объекта отличается от выходного сигнала модели. При этом на выходе сравнивающего устройства появляется сигнал ошибки. Данный сигнал поступает на вход блока релейных элементов, с выхода которого фор ируется разрывное управление моделью 4 таким образом, чтобы в контуре из блоков: 4,3, 5 н 4 существовал скользявий режим, во время которого выход модели под-
40 гоняется под выход объекта. В результате на втором входе модели формируется некоторое дополнительное разрывное управление, характеризующее отличие модели от объекта.
5 Одновременно вычисленное разрывное управление поступает на вход блока 6 фильтров, с выхода которого вычисляется среднее эквивалентное значение разрьшных сигналов. Далее сигнал инвертируется и через сумматор 1 поступает на вход объекта 2 и пер- . вый вход модели 4. При этом на модели данный сигнал компенсирует среднюю срставлянщую разрывного сигнала,
55 поступающую на второй вход модели, сохраняя заданные эталонные свойства модели. А поступая на объект компенсирует те параметрические или j
S11533146
сигнальные возмущения, которые Рлботоспособность предлагаемого
вызьтают отклонение выхода объёк-регулятора подтверждается исследовата от модели.ниями в промьгашенных условиях на
Использование дополнительнмК бло- 5катного стана.
ков (блока фильтров и инвертора) Технико-экономический эффект
и включение указанным способом выгод-от внедрения прилагаемой самонастно отключает предлагаемое устройствораивакяцейся системы управления обусот известного, так как применениеловлен улучшением динамических
предложенного изобретения в составе 1.0свойств автоматических систем. Кроавтоматических систем расширяет об-ме того, предлагаемое устройство
jiacTb использования самонастраиваю-может быть, например, рассчитано
щихся систем, использующих в своихна работу в системах регулирования
апг.от итмах скользяпше режиму.электропривода прокатных клетей.
электроприводах . непрерывного про
| название | год | авторы | номер документа |
|---|---|---|---|
| Самонастраивающаяся система управления | 1980 |
|
SU935875A1 |
| Самонастраивающаяся система управления | 1986 |
|
SU1312524A2 |
| Самонастраивающаяся система автоматического управления для объектов с запаздыванием | 1981 |
|
SU1173390A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2013 |
|
RU2541848C1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМ ОБЪЕКТОМ | 2002 |
|
RU2230350C2 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1990 |
|
RU2011286C1 |
| Бинарная система управления вынужденным движением | 1983 |
|
SU1117587A1 |
| Самонастраивающаяся система управления | 1980 |
|
SU962852A2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА | 1996 |
|
RU2111521C1 |
| Самонастраивающаяся система управления | 1983 |
|
SU1158974A1 |
САМОНАСТРАИВАЮ01АЯСЯ СИСТЕМА УПРАВЛЕНИЯ, содержащая сумматор. подключенный выходом к входу объекта регулирования, устройство сравнения, первый вход которого подключен к выходу объекта регулирования, второй вход подключен к выходу модели, а выход устройства сравнения соединен с входом блока релейньрс элементов, причем первый вход сумматора является входом системы, о т л и ч а torn, а я с я тем. что, с целью расширения области применения путем обеспечения работоспособности системы в условиях существенных нелинейностей в нее введены последовательно соединенные блок фильтров и инвертор, причем выход инвертора подключен к второму входу сумматора, а (Л вход блока фильтров соединен с выходом блока релейных элементов и вторым входом модели, первый вход которой подключен к выходу сумматора.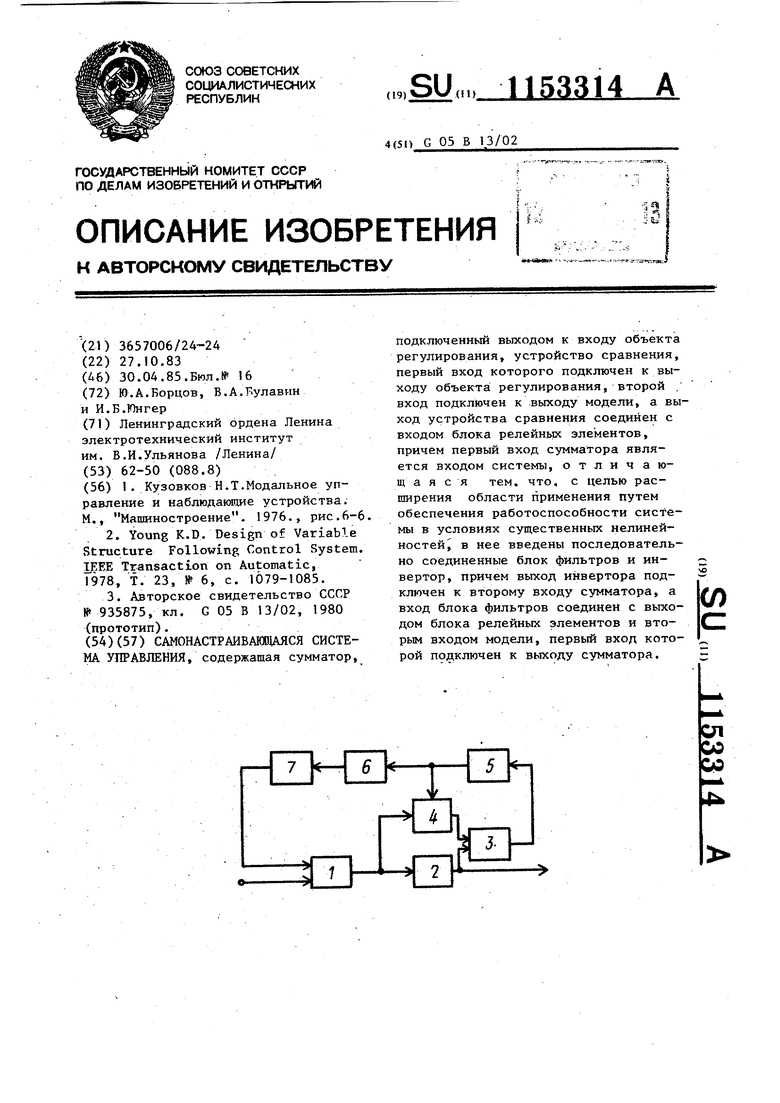
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Кузовков Н.Т.Модальное управление и наблюдающие устройства | |||
| М., Машиностроение | |||
| Планшайба для точной расточки лекал и выработок | 1922 |
|
SU1976A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Design of Variable Structure Following Control System | |||
| IEEE Transaction on Automatic, 1978, T | |||
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ ДУТЬЯ ПАРАМИ ИЛИ ГАЗАМИ В ДУГОВОМ ГЕНЕРАТОРЕ НЕЗАТУХАЮЩИХ КОЛЕБАНИЙ | 1921 |
|
SU1079A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
