1
Изобретение относится к облас- ти вычислительной техники.
Известны электромеханические моделирущие устройства, содержащие вычислительный блок с двумя щупами, перемещаемыми по цилиндрической по-верхности укрепленных на одной оси барабанов, жестко связанных с ротором первого сельсин-приемника, выходной вал вычислительного блока жестко связан с сельсин-датчиком.
Цель изобретения - повысить точность работы устройства.
Предлагаемое устройство отличается от известных тем, что содержит самоходную тележку, на которой размещены полугирокомпас и второй сельсин-приемник, выход полугирокомпаса подключен через выносной указатель ко входу первого сельсинприемника, а выход сельсин-датчика через репитер вычислительного устройства соединен со входом второго сельсин-приемника.
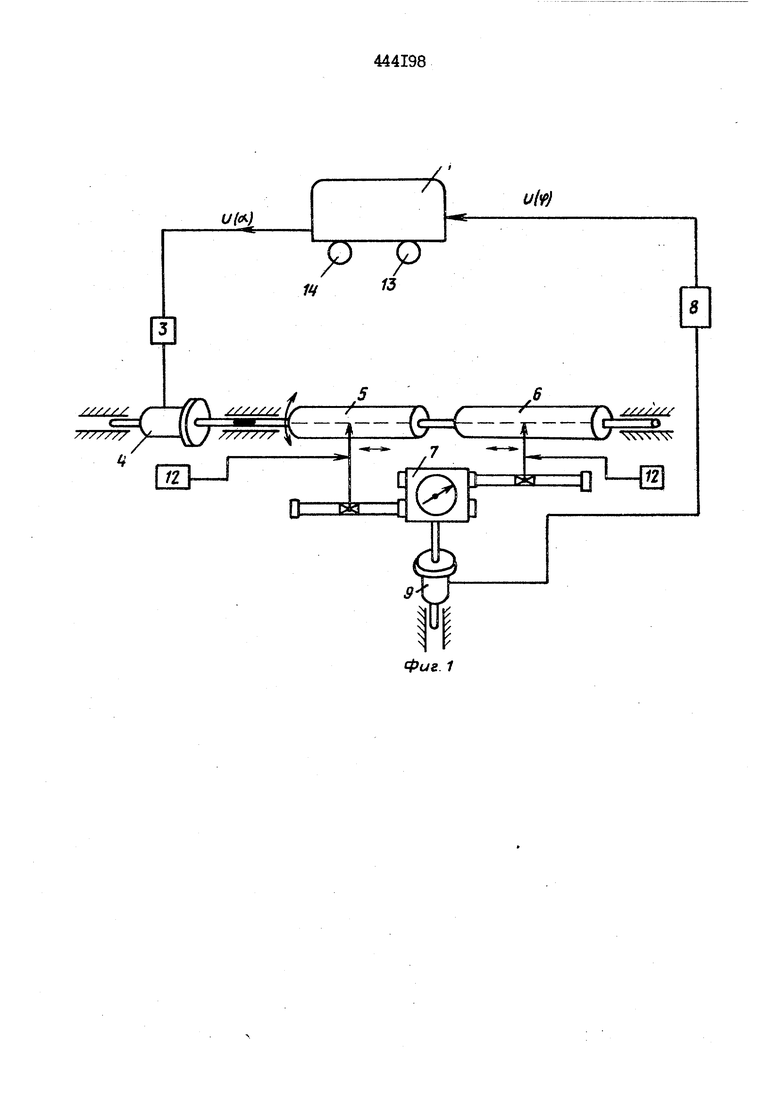
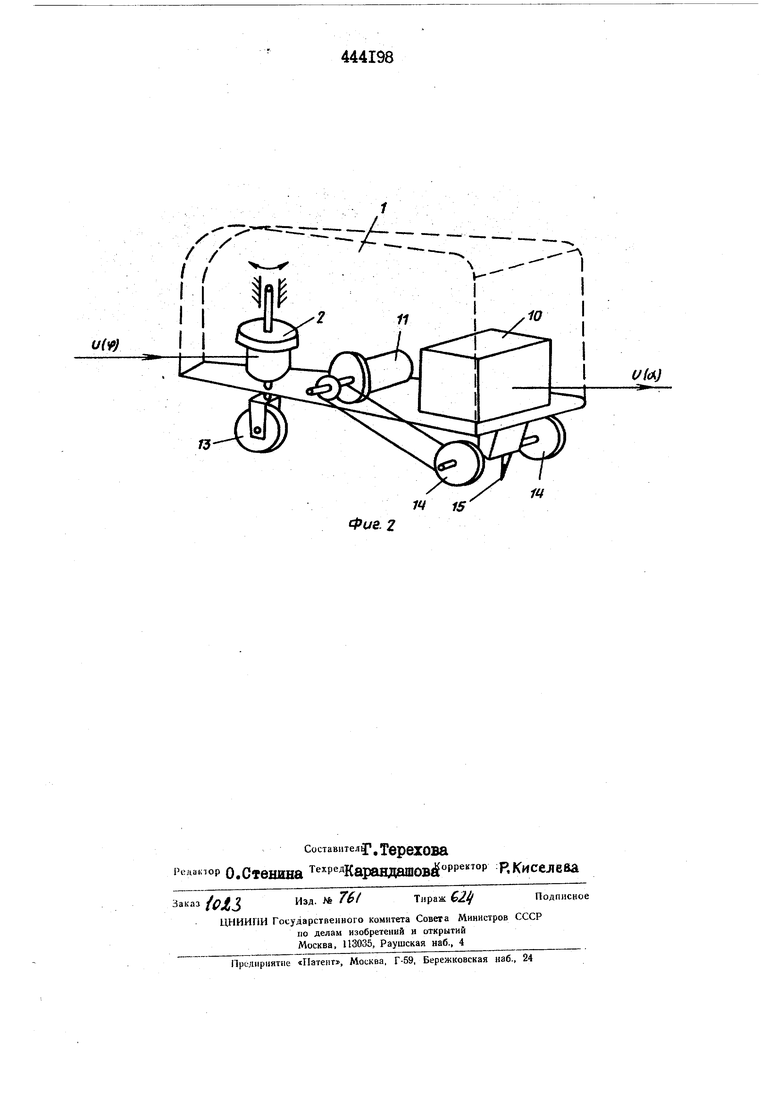
На фиг.1 представлена схема предлагаемого электромеханического моделирующего устройства; на фиг.2самоходная тележка устройства.
Предлагаемое устройство состоит из самоходной тележки I с находя,щ1шся на ней сельсин-приемником 2, выносного указателя 3, сельсин-приемника 4, барабанов 5,6 с графиком необходимых заранее построенных Фзгнкций, вычислительного устройства 7, репитера 8 вычислительного устройства и сельсин-датчика 9. На
борту тележки I расположены полуги рокомпас 10, используемый как датчик угла ее поворота, и электродвигатель II.
В устройство вводят щупы 2,
управляемые оператором, следящим за работой всей системы. Тележка имеет рулевое колесо 13,ведущие колеса 14 и пишущий узел 15.
Устройство работает следувдим
образом.
Требуемая кривая изображается град ически на горизонтальной ровной поверхности заранее нанесенными координатными осями и координатной сеткой.
В общем случае касательная к предлагаемой кривой в начале координат образует с осью оу начальный угол do - .
Перед началом работы тележку I устанавливают в начало координат так, чтобы перо ее пишущего узла 15 находилось над началом координат, а ее продольная ось была совмещена с одной из координатных осей. После раскрутки полутирокомпаса 10, находящегося на тележке I производят разарретирование его ротора и поворот всей тележки на угол cf-o вокруг -вертикальной оси, совпадающей с осью подвески ротора полугирокомпаса и проходящей одновременно через точку касания пера пишущего узла 15 с плоскостью чертежа. Этот угол пов.орота Хо в виде электрического сигнала У id} передается от полугирокомпаса 10 на его выносной указатель 3, а оттуда на сельсин-приемник 4. Выносной указатель 3 необходим для контроля за правильностью работы системы. Сельсин-приемник 4 поворачивает барабаны 5 и 6, жестко укрепленные на общей оси, на угол оСоОператор устанавливает щупы 12 вычислительного устройства 7 в определенное положение, соответствующее координате Уо На барабанах 5 и 6 вычерчены заранее семейства кривых, соответствующие зависимости f (оС). Щупы вычислительного устройства 7 могут двигаться строго возвратно-поступательно благодаря направляющим пазам.
Вычислительное устройство 7 через репитер поворачивает ось сельсин-датчика 9 на угол V , сельсин-приемник 2, находящийся на тележке I, поворачивает вилку рулевого колеса 13 тележки I на этот же угол. Далее включается электродвигатель II тележки I, приводящий во вращение ведущие колеса 14 тележки 1.
Тележка I начинает двигаться по дуге окружности радиуса R . По достижении координаты У, - Уд v а У тележка останавливается.
Поскольку тележка двигалась по циркуляции,Полугирокомпас 10
определит новый угол , который составляет продольная ось тележки с осью у . Этот угол в виде электрического сигнала U () передается через выносной указатель 3 на сельсин-приемник 4, барабаны 5 и 6 с вычерченными на них графиками поворачиваются на угол od/ ;
оператор устанавливает щупы 12 вычислительного устройства 7 в новое положение, соответствующее текущим параметрам «:/ и «// на графиках барабанов 5 и 6. Вычислительное устройство 7 через сельсин- датчик
15 9 поворачивает сельсин-приемник 2 и вилку рулевого колеса 13 тележки I на угол 2 контроля работы между сельсин-датчиком и сельсинприемником включен репитер 8. После включения оператором электродвигателя II тележки I последняя проделывает путь по новой циркуляции с радиусом до соответствующей координаты у2-Ут+Ау.
25 После остановки тележки I и замера нового угла при помощи полугирокомпаса 10 весь цикл повторяется.
Таким образом, конфигурация
30 исследуемой кривой заменяется последовательностью дуг окружностей определенных радиусов. Причем чем меньше длина этих отрезков AI) ,на которых производится указанная за3g мена, тем точнее построение.
ПРЕДОЕТ ИЗОБРЕТЕНИЯ
40 Электромеханическое моделирующее устройство, содержащее вычислительный блок с двутйя Поупами, установленными на цилиндрической поверхности укрепленных на одной оси
45 барабанов,жестко связанных с ротором первого сельсин-приемника, выходной вал вычислительного блока жестко связан с сельсин-датчиком, отличающееся тем, что, с целью повышения точности, устройство содержит самоходную тележку, на которой размещены полугирокомпас и второй сельсин-приемник, выход полугирокомпаса подключен через выносной55 указатель ко входу первого сельсинприемника, а. выход сельсин-датчика через репитер вычислительного устройства соединен со входом второго сельсин-приемника. J
фиг. 1 //ХУХХХ / Х/Х/ХУ /
Фие. 2
| название | год | авторы | номер документа |
|---|---|---|---|
| Путевая машина | 1982 |
|
SU1082891A1 |
| Устройство контроля эксцентриситета поковок типа ступенчатых валов | 1980 |
|
SU963663A1 |
| Указатель вылета стрелы крана | 1983 |
|
SU1134527A1 |
| Динамический автомобильный тренажер | 1980 |
|
SU894781A1 |
| СТЕРЕОФОТОГРАММЕТРИЧЕСКИЙ ПРИБОР ДЛЯ | 1973 |
|
SU395714A1 |
| Контрольный стрелограф | 1983 |
|
SU1157155A1 |
| Устройство для защиты от столкновения стрел башенных кранов | 1966 |
|
SU540806A1 |
| Автоматическая система управления рулемСудНА | 1979 |
|
SU839859A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО НАПРАВЛЕНИЯ ДВИЖЕНИЯ САМОХОДНОЙ КОЛЕСНОЙ МАШИНЫ | 1969 |
|
SU249110A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО КОНТРОЛЯ ПЕРЕКОСА ОПОР КОЗЛОВОГО КРАНА | 1966 |
|
SU187273A1 |