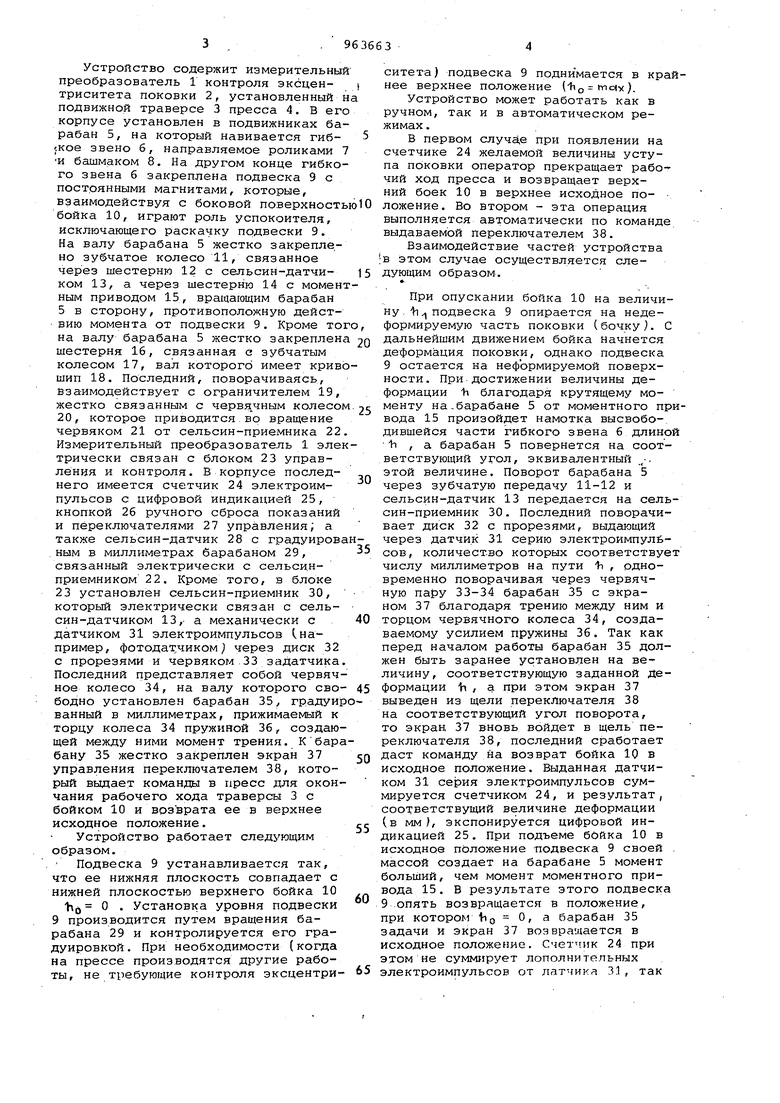
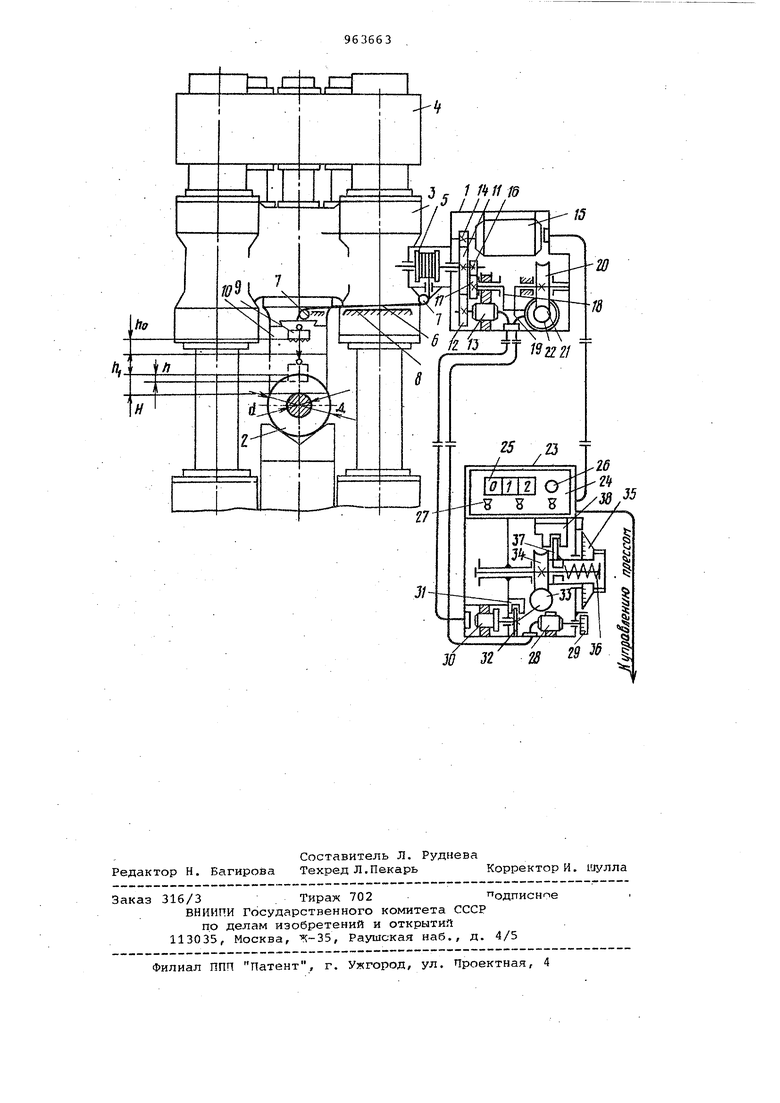
Изобретение относится к обработке металлов давлением, а именно к свободной ковке на прессах деталей с уступами, например ступенчатых валов Известно устройство контроля эксцентриситета поковок типа ступенчатых валов при ковке на прессах, содержащее установленный на подвижной траверсе пресса измерительный преобразователь , а также блок управления и контроля 1 . Недостатками известного устройства являются низкий коэффициент испол зования металла и высокая трудоемкость механообработки поковок, к.ак следствие вынужденного увеличения припусков на эксцентричность поковок из-за низкой точности вводимых устройством корректив. Целью изобретения является повышение коэффициента использования металлов и снижение трудоемкости за счет повышения точности изготавливае мых поковок. С этой целью в устройстве контроля эксцентриситета поковок типа ступенчатых валов при ковке на прессах, содержащем установленный на подвижной траверсе пресса измерительный преобразователь, а также блок управления и контроля, измерительный прчеобразователь выполнен в виде вращающегося барабана, размещенной с возможностью взаимодействия с недеформируемой частью поковки 1подвески с магнитным успокоителем, связанной с барабаном гибким элементом, и кинематически связанных с барабаном сельсин-датчика, моментного привода и связанного с ними, посредством червячного соединения и кривошипа сельсинприемника, а блок управления и контроля выполнен в виде индивидуального сельсин-датчика с барабаном ручного управления, счетчика электроимпульсов, индивидуального сельсинприемника, датчика электроимпульсов, червячной пары, барабана задачи величины разности радиусов поковки и экрана переключателя управления прес сом, при этом сельсин-приемник последовательно связан с ротором датчика электроимпульсов, а сельсин-датчик и сельсин-приемник измерительного преобразователя соответственно соединены с сельсин-приемником и сельсиндатчиком блока управления и контроля. На чертеже изображена схема уст ройства контроля эксцентриситета поковок. Устройство содержит измерительны преобразователь 1 контроля эксцентриситета поковки 2, установленный подвижной траверсе 3 пресса 4, В ег корпусе установлен в подвижниках ба рабан 5, на который навивается гиб;кое звено 6, направляемое роликами и башмаком 8. На другом конце гибко го звена 6 закреплена подвеска 9 с постоянными магнитами, которые, взаимодействуя с боковой поверхност бойка 10, играют роль успокоителя, исключающего раскачку подвески 9. На валу барабана 5 жестко закреплено зубчатое колесо 11, связанное через шестерню 12 с сельсин-датчиком 13, а через шестерню 14 с момен ным приводом 15, вращающим барабан 5 в сторону, противоположную действию момента от подвески 9. Кроме то на валу барабана 5 жестко закреплен шестерня 16, связанная с зубчатым колесом 17, вал которого имеет крив шип 18. Последний, поворачиваясь, взаимодействует с ограничителем 19, жестко связанным с червя чным колесо 20, которое приводится во вращение червяком 21 от сельсин-приемника 22 Измерительный преобразователь 1 эле трически связан с блоком 23 управления и контроля. В корпусе последнего имеется счетчик 24 электроимпульсов с цифровой индикацией 25, кнопкой 26 ручного сброса показаний и переключателями 27 управления; а также сельсин-датчик 28 с градуиров ным в миллиметрах барабаном 29, связанный электрически с сельсинприемником 22. Кроме того, в блоке 23 установлен сельсин-приемник 30, который электрически связан с сельсин-датчиком 13,- а механически с датчиком 31 электроимпульсов (.например, фотодат чиком через диск 32 с прорезями и червяком 33 задатчика Последний представляет собой червяч ное колесо 34, на валу которого сво бодно установлен барабан 35, градуир ванный в миллиметрах, прижимаемый к торцу колеса 34 пружиной 36, создающей между ними момент трения. Кбара бану 35 жестко закреплен экран 37 управления переключателем 38, который выдает команды в пресс дщя окончания рабочего хода траверсы 3 с бойком 10 и возврата ее в верхнее исходное положение. Устройство работает следующим образом. Подвеска 9 устанавливается так, что ее нижняя плоскость совпадает с нижней плоскостью верхнего бойка 10 Ьд О . Установка уровня подвески 9 производится путем вращения барабана 29 и контролируется его градуировкой. При необходимости (когда на прессе производятся другие работы, не требующие контроля эксцентри ситета) подвеска 9 поднимается в крайнее верхнее положение (). Устройство может работать как в ручном, так и в автоматическом режимах . В первом случае при появлении на счетчике 24 желаемой величины уступа поковки оператор прекращает рабочий ход пресса и возвращает верхний боек 10 в верхнее исходное положение. Во втором - эта операция выполняется автоматически по команде выдаваемой переключателем 38. Взаимодействие частей устройства в этом случае осуществляется следующим образом. При опускании бойка 10 на величину . ti подвеска 9 опирается на недеформируемую часть поковки (бочку ). С дальнейшим движением бойка начнется деформация поковки, однако подвеска 9 остается на неформируемой поверхности. При достижении величины деформации 11 благодаря крутящему моменту на-барабане 5 от моментного привода 15 произойдет намотка высвободившейся части гибкого звена 6 длиной 1i , а барабан 5 повернется на соответствующий УГОЛ, эквивалентный -. этой величине. Поворот барабана 5 через зубчатую передачу 11-12 и сельсин-датчик 13 передается на сельсин-приемник 30. Последний поворачивает диск 32 с прорезями, выдающий через датчик 31 серию электроимпулбсов, количество которых соответствует числу миллиметров на пути h , одновременно поворачивая через червячную пару 33-34 барабан 35 с экраном 37 благодаря трению между ним и торцом червячного колеса 34, создаваемому усилием пружины 36. Так как перед началом работы барабан 35 должен быть заранее установлен на величину, соответствующую заданной Деформации li , а при этом экран 37 выведен из щели переключателя 38 на соответствующий угол поворота, то экран. 37 вновь войдет в щель переключателя 38, последний сработает даст команду на возврат бойка 10 в исходное положение. Выданная датчиком 31 серия электроимпульсов суммируется счетчиком 24, и результат, соответствущий величине деформации (в мм), экспонируется цифровой индикацией 25. При подъеме бОйка 10 в исходное положение подвеска 9 своей массой создает на барабане 5 момент больший, чем момент моментного привода 15. В результате этого подвеска 9 опять возвращается в положение, при котором Ьо О, а барабан 35 задачи и экран 37 возвращается в исходное положение. Счетчик 24 при этом не суммирует дополнительных электроимпульсов от датчика 31, так
как заблокирован командой на подъем бойка ГО.Конец подъема последнего раблокирует командой счетчик 24 и произведет сброс его показаний.
После поворота поковки 2 манипулятором цикл работы устройства повторяется.. ,
Таким образом, после ряда последо вательных установок барабана 35 задачи будет получена поковка с уступами Н заданной величины. При этом может быть получено значение эксцентриситета от нуля до заданной величины.
Изобретение позволяет повысить точность поковки, снизить припуски, а значит и снизить расход металла на поковки, которые подвергаются последующей механообработке.
Формула изобретения
Устройство контроля эксцентриситета поковок типа ступенчатых валов при ковке на прессах, содержащее установленный на подвижной траверсе пресса измерительный преобразователь а также блок управления и контроля, отличающеес.я тем, что, с целью повышения коэффициента использования металла и снижения тру. доемкости счет повышения точности
изготавливаемых поковок, измерительный преобразователь выполнен в виде вращающегося барабана, размещенной с возможностью взаимрдействия с недеформируемой частью поковки подвески
с магнитным успокоителем, связанной с барабаном гибким элементом, и кинематически связанных с барабаном сельсин-датчика, моментного привода и связанного с ними посредством червяного соединения и кривошипа сельсинприемника, а блок управления и контроля выполнен в виде индивидуального сельсин-датчика с барабаном ручного управления, счетчика электроимпульсов, индивидуального сельсинприемника, датчика электроимпульсов, червячной пары, барабана задачи величины разности радиусов поковки и экрана переключателя управления прессом, при этом сельсин-приемник последовательно связан с ротором датчика электроимпульсов, а сельсин-датчик и сельсин-приемник измерительного преобразователя соответственно
соединены с сельсин-приемником и сельсин-датчиком блока управления и контроля.
Источники информации, принятые во внимание при экспертизе
1. Патент Японии № 53-12255, кл. 12 С 14, 1978 (прототип). JO 32 1&