Изобретение относится к обвасти станкостроения и может бьггь применено в случаях, когда необходимо дистанционно устанавливать либо изменять вегичй- ну хода подвижного органа станка.
Известен механизм настройки дпинь хода рабочего органа продопьно-штофо вального станка, в котором на осях се«ьсииов-аадатчиков смонтированы кинематические элементы, например шкивы каждый из которых посредством тросика и блоков соединен со своей стрелкой, способной перемещаться вдоль масштабной шкалы, соответствующей полному перемещению рабочего органа станка. Стрелки закреплены в ограничителях хода, установленных на тросах; кроме того, имеются упоры, определяющие крайние точки хода столаLIJ.
Недостатком указанного устройства наличие тросов, которые могут растягиваться, провисать и проскальзы вать относительно шкивов, что уменьшает надежность установки длины хода.
Цепь изобретения - повьпиение надежности работы механизма, повышение удобства его наладки.
Цель достигается тем, что ограничители углов поворота роторов сельсинов вьтолнены в вше двух дисков, эксцентрично установленш тх на роторах сельсинов, а Также выполнением боковых упоров в виде ;двухступенчатых валиков, разность диаметрхзв ступенек которых соответствует разнице перебегов рабо чего органа в наладочном и рабочем релсимах.
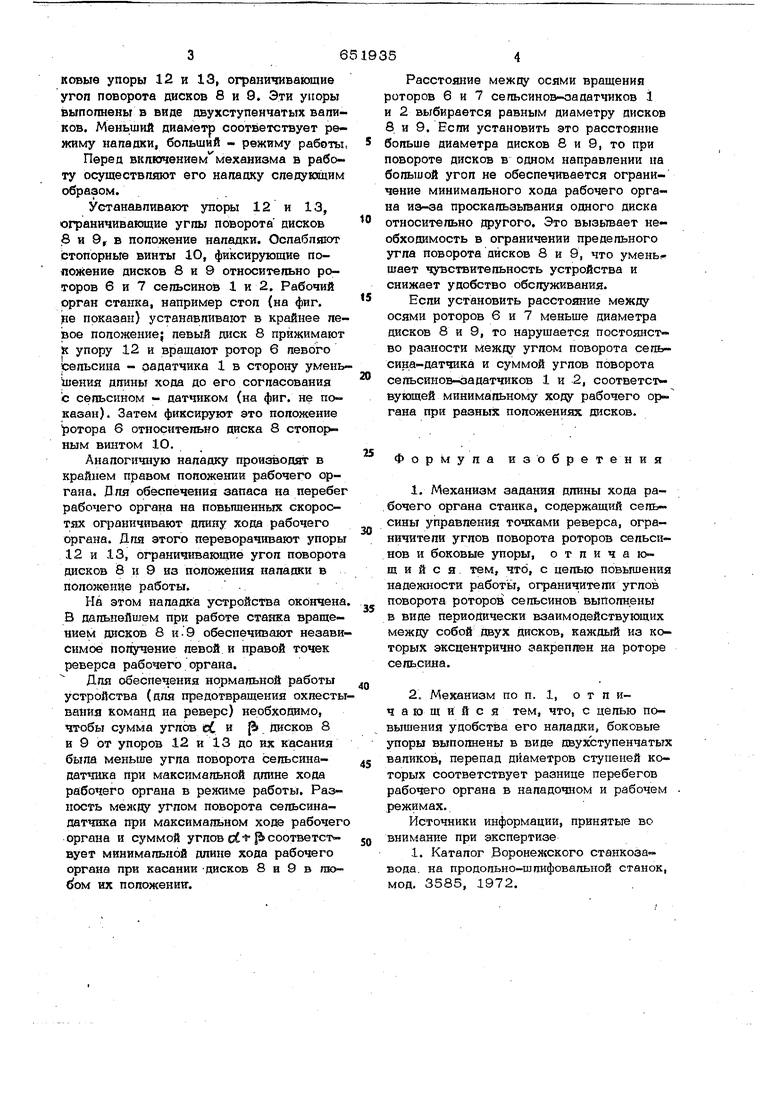
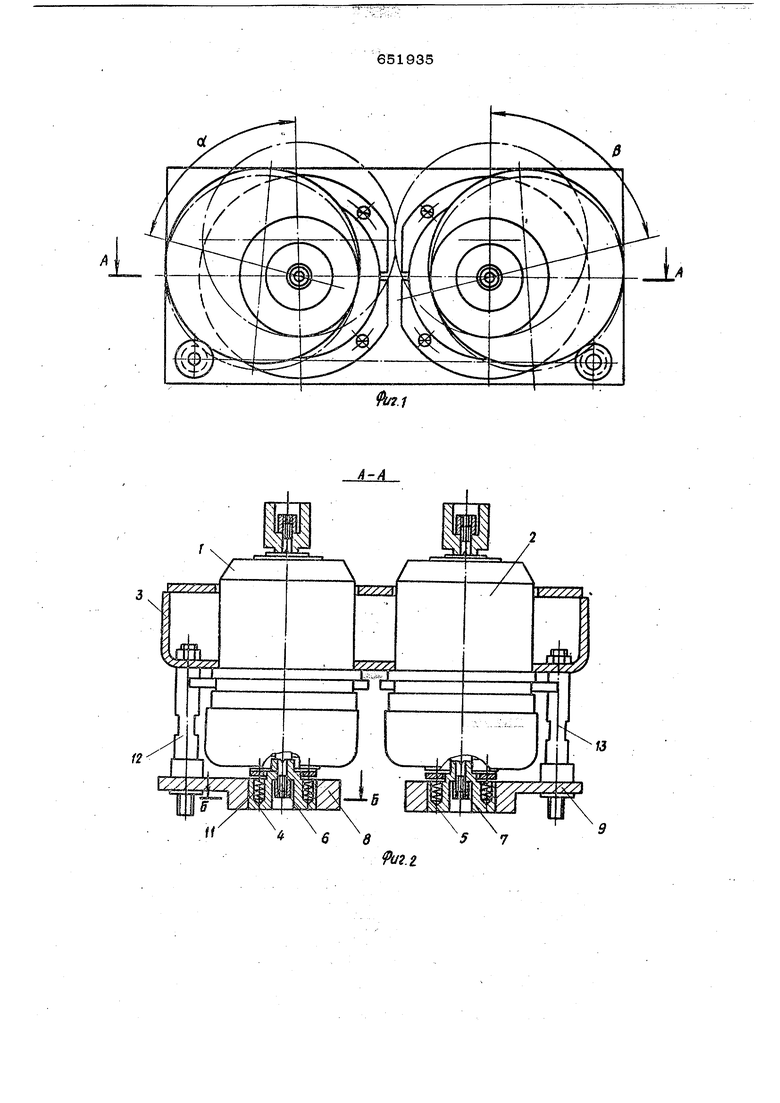
На фиг. 1 - общий вид механизма; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 2.
Се льсины-за дйтчйки 1 и 2 смонтированы на пульте управления в бпоке 3.
На втулках 4 и 5, .установленных на роторах 6 и 7 сельсинов 1 и 2, ш сцентрично смонтированы диски 8 и 9. Они крепятся к втулкам 4 и 5 винтами 10. Пружины 11 служат тормозом для диоков 8 и 9. На блоке 3 установлены бо- .
ковые упоры 12 и 13, ограничивающие угоп поворота дисков 8 и 9. Эти упоры выполнены в виде ОБухступенчатых вапиков. Меньший диаметр соответствует режиму нападки, больший - режиму работы, Перед включениеммеханизма в работу осуществгшют его нападку следующим образом.
Устанавпивают упоры 12 и 13, ограничивающие углы поворота дисков 8 и 9 в положение наладки. Ослабляют стопорные винты 10, фиксирующие положение дисков 8 и 9 относительно роторов 6 и 7 сельсинов 1 и 2. Рабочий орган станка, например стол (на фиг. ре показан) устанавливают в крайнее леJBoe положение; левый диск 8 прижимают fe упору 12 и вращают ротор б левого (сельсина - оадатчика 1 в сторону уменьЬения длины хода до его согласования с сельсином - датчиком (на фиг. не показан). Затем фиксируют это положение ротора 6 относительно диска 8 стопорным винтом 10,
Аналогичную напашсу произзаодят в крайнем правом положении рабочего органа. Л ля обеспечения запаса на перебег рабочего органа на повышенных скоростях ограничивают дгтину хода рабочего органа. Дш этого переворачивают упоры 12 и 13, ограничивающие угол поворота дисков 8 и 9 из положения наладки в положение работы.
На этом наладка устройства окончена. В дальнейшем при работе станка вращением дисков 8 и-9 обеспечивают независимое попутзвние левой и правой точек реверса рабочего органа.
Для обеспечения нормальной работы устройства (для предотвращения охлесты- вания команд на реверс) необходимо, чтобы сумма углов оС и Ь. дасков 8 и 9 от упоров 12 и 13 до их касания была меньше угла поворота сельсинадатчика при максимальной длине хода рабочего органа в режиме работы. Разность углом поворота сельсинадатчика при максимальном ходе рабочего органа и суммой углов cC-f |Ь соответствует минимальной длине хода рабочего органа при касании -дисков 8 и 9 в гаобом их по ложен ии.
Расстояние между осями вращения роторов 6 и 7 сельсинов-аадатчиков 1 и 2 выбирается равным диаметру дисков 8 и 9. Если установить это расстояние больше диаметра дисков 8 и 9, то при повороте дисков в одном направлении на большой угол не обеспечивается ограничение минимального хода рабочего органа из-за проскальзьтания одного диска относительно другого. Это вызьтвает необходимость в ограничении предельного угла поворота дисков 8 и 9, что уменьшает чувствительность устройства и снижает удобство обслуживания.
Если установить расстояние между осями роторов 6 и 7 меньше диаметра дисков 8 и 9, то нарушается постоянство разности между углом поворота сельсина-датчика и суммой углов поворота сельсинов-оадатчиков 1 и 2, соответствующей минимальному ходу рабочего органа при разных положениях дисков.
Формула изобретения
1.Механизм задания длины хода рабочего органа станка, содержащий сельсины управления точками реверса, ограничители углов поворота роторов сельсинов и боковые упоры, отличающийся тем, что , с целью повышения наденшости работы, ограничители углов поворота роторов сельсинов выполнены
в виде периодически взаимодействующих между собой Двух дисков, каждый из которых эксцентрично закреплен на роторе сельсина.
2.Механизм по п. 1, о т л ичающийся тем, что, с целью повышения удобства его наладки, боковые упоры выполнены в виде двухступенчатых валиков, перепад диаметров ступеней которых соответствует разнице перебегов рабочего органа в наладочном и рабочем режимах.
Источники информации, принятые во внимание при экспертизе
1. Каталог Воронежского станкозавода, на продопьно-шлифовальной станок, мод, 3585, 1972.
5 7
651935
