I Изобретение относится к сервомеханизмам общего назначения и может бьргь использовано как в на.земных системах управления, так и в системах управления летательных апгаратов,
Известны электрогвдравлргческие следящие системы, содержащие интегрирующий усилитель с ограничением, подключенный к входу суммирующего усилителя, последователь но соединенные сумшфующий и релей ный усилители, первые два релейных элемента и интегрирующий усилител выход которого подключен к суммирующему усилителю, другие выходы первых двух релейных элементов соединены с силовым механизмом и входами вторых двух релейных элементов, подключенных к силовому механизму, датчик обратной связи соединен с входом суммирующего усилителя.
Предлагаемая система отличается от известных тем, что с целью повышения точности работы системы,
IB ней установлен шаговый двигател выход которого подключен к входу суммирующего усилителя, входы к выходам первых двух релейных 5 элементов, а выход элемента обратной связи подключен к входу интегрирующего усилителя без ограничения.
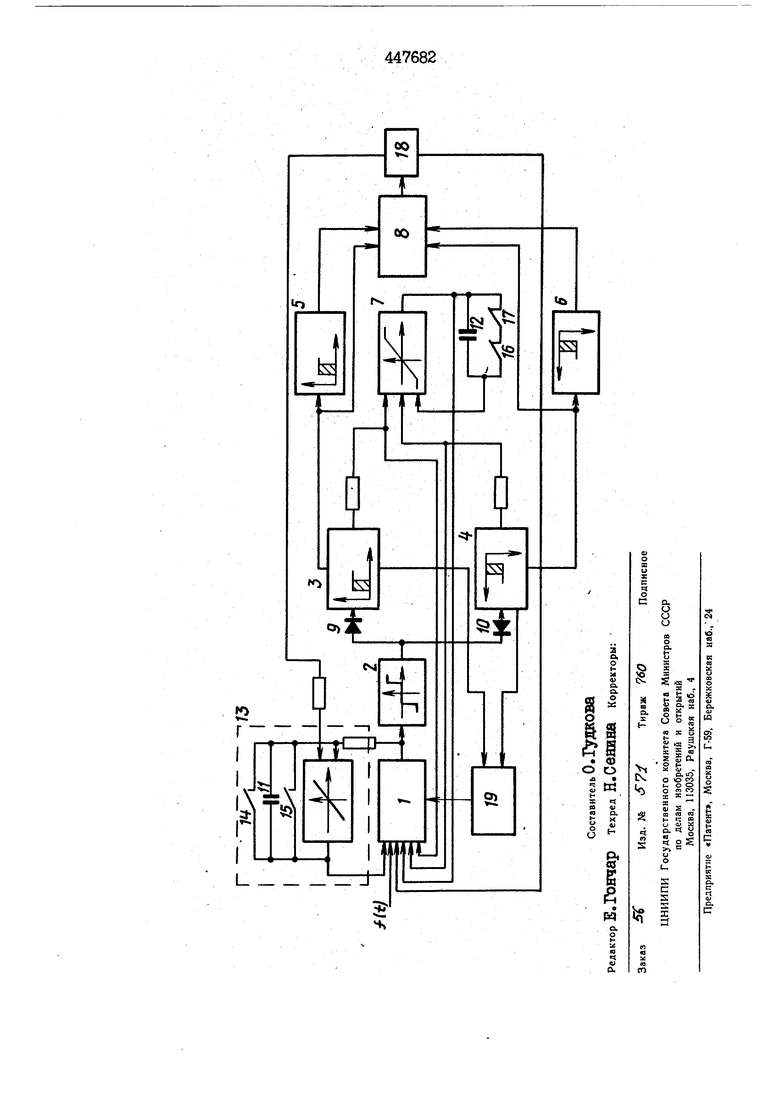
Ш чертеже приведена схема 0 предлагаемой электрогидравлической системы,
Она содержит оуммирующий усилитель Е, релейный усилитель 2, релейные элементы 3-6, интегршу5 ющий усилитель с ограничением . силовой механизм 8, диоды 9 и 10, . конденсаторы II и 12, интегрирующий усилитель 13, контакты релейных элементов 14-17, элемент об0 ратной связи с нуль-органом 8, шаговый двигатель 19.
Суглмирование сигналов 6 осуществляется суммирующим усилителем I, выход которого соединен с входом релейного усилитеI ля 2 и входом интегрирующего усилителя 13. Сигнал с выхода релейного усилителя поступает на релейные элементы 3 и 4, при срабатывании которых подается ступенчатый сигнал на два других релейных элемента 5 и 6, интегрирующий усшш- g тель 7, шаговый двигатель IS, вьк ход которого соединен с элементом компенсации дрейфа сушлирующего усилителя I, и на вход усилителя
I.Конденсаторы II и 12, находя-. ю щиеся в обратной связи интегратоов 7 и 13, могут шунтироваться контактаьш элементов 3 и 4. Выход элемента обратной связи с нуль-органом 18 соединен с входом is су1ширую1цего усилителя I и входом интегрвфующего усилителя 13.
Приведение исполнительных оранов в нулевое положение предлааемым гфиводом осуществляется еле- 2о ующим образом. При нулевом полоении исполнительного органа и отсутствии сигнала управления/(t) о ползунки нуль-органа и элемента обратной связи будут находиться 25 не на нейтрали, С выхода нуль-орана будет подан ступенчатый сигнал определенной полярности на вход интегрирующего усилителя 13. Когда напряжение на выходе усили- зо теля I достигнет величины зоны нечувствительности релейного усилителя 2, он сработает и подаст ступенчатое напряжение на релейный элемент 3 /или 4/, при срабатывании 35 которого зашунтируется конденсатор
II,расшунтируется конденсатор 12 и подается ступенчатое напряжение определенной полярности на шаговый двигатель 19. шаговый двига- тель переместит исполнительный элемент устройства компенсации усилителя I на определенную величину. Величина дрейфа /небаланса/ уменьшится. Исполнительный орган приблизится к нулевому положению.
Так как конденсатор II зашунтирован, то сигнал на выходе суммирующего усилителя I будет меньше зоны нечувствительности редаиного усилителя 2 и, следовательно, сигнал на выходе релейного усилителя 2 станет равен нулю. Релейный элемент 3 /шш 4/ отпустит, расшунтируется конденсатор И, зашунтируется конденсатор 12 is, снимается ступенчатое напряжение с шагового двигателя -19, Щ)оцесс начнет повторяться и будет продолжаться до тех по), пока исполнительный орган не зашет нейтральное /нулевое/ положение, Ползунвк нуль-органа при этом будет находиться на изолированном участке, в результате чего цепь подачи ступенчатого напряжения на интегрирующий усили- тель 13 будет прервана.
ПРЕДМЕТ ИЗОЕРЕ1ЕНШ
Электрогвдравличеокая следящая система, содер)ка1щя интегрирующий усилитель, подключенный к входу суммирующего усилителя, последовательно соединенные суммирующий и релейный усилители, первые два релейных элемента и интегрирующий усилитель с ограничением выход которого подключен к суммирующему усилителю, другие выходы первых двух релейных элементов соединены с силовытл механизмом и выходами вторых двух релейных элементов, подключенных к силовому механизму, и датчик обратной связи которого соединен с входом суммирующего усилителя, отличающаяся тем, что, с целью повышения точности работы системы, в ней установлен шаговый двигател: выход которого подключен к входу суммирующего усилителя, входы - к выходам первых двух релейных элементов, а выход с элемента обратной связи подключен к входу интегрирующего усилителя.
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕЛЕЙНОЕ УПРАВЛЯЮЩЕЕ УСТРОЙСТВО | 1972 |
|
SU336643A1 |
| Устройство для управления двигателем переменного тока | 1976 |
|
SU699645A1 |
| РЕЛЕЙНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 1970 |
|
SU272701A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
| РЕЛЕЙНОЕ УПРАВЛЯЮЩЕЕ УСТРОЙСТВО | 1970 |
|
SU283360A1 |
| БИБЛИС I | 1973 |
|
SU394585A1 |
| РЕЛЕЙНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 1973 |
|
SU403883A1 |
| Устройство для управления двигателем переменного тока | 1978 |
|
SU782117A1 |
| Нелинейное корректирующее устройство | 1984 |
|
SU1226403A2 |
| УСТРОЙСТВО ДЛЯ ТЕРМОСТАТИРОВАНИЯ | 1973 |
|
SU366455A1 |