1
Изоо 1етение относится к нзмерятепь- i ной технике и может быть П эименено при измерении ускорений и их производных, например, в гирокомпасах.
Известные датчики скорости изменения ускорения, содержащие инерционное тело, подвешенное на упругом подвесе в корпусе, заполненнок) жидкостью, цепь компенсационной силовой обратной связи тела и попла- MJK, подвспиенный к ине)ционног.)у телу на yii(jyroM элементе, обладают недостаточной точностью и значительнь.гми габаритами иэ,за наличия гоконодводов и датчиков, связь ьанлиих поплавок с HHejmnoHHbiM .
Иредпагаемый датчик отличается от известных тем, что он снабжен дополнитештной компенсационной силовой обратной связью от дптчнка перемещения поплавка относительно Ktjpnyca через усипитеш. к первой пг,|1ол11итольной cj6MOTKe датчика силы, ()iiciioHu;iu-HH A на поплавке в зазоре магнитной сисгемы латника силы, а вторая дополнительная обмотка датчика силы раоположена на поплавке и Ежлючена в цепь когч11.псапи нной силовой обмотки -гчла, J
npiineN; упругий элемент нодвеса поплавка I СЕШзан с корпусом.
Это позволяет увеличить точность и уменьшить габариты датчика. На чертеже изображена конструкшш
предлагаемого датчика.
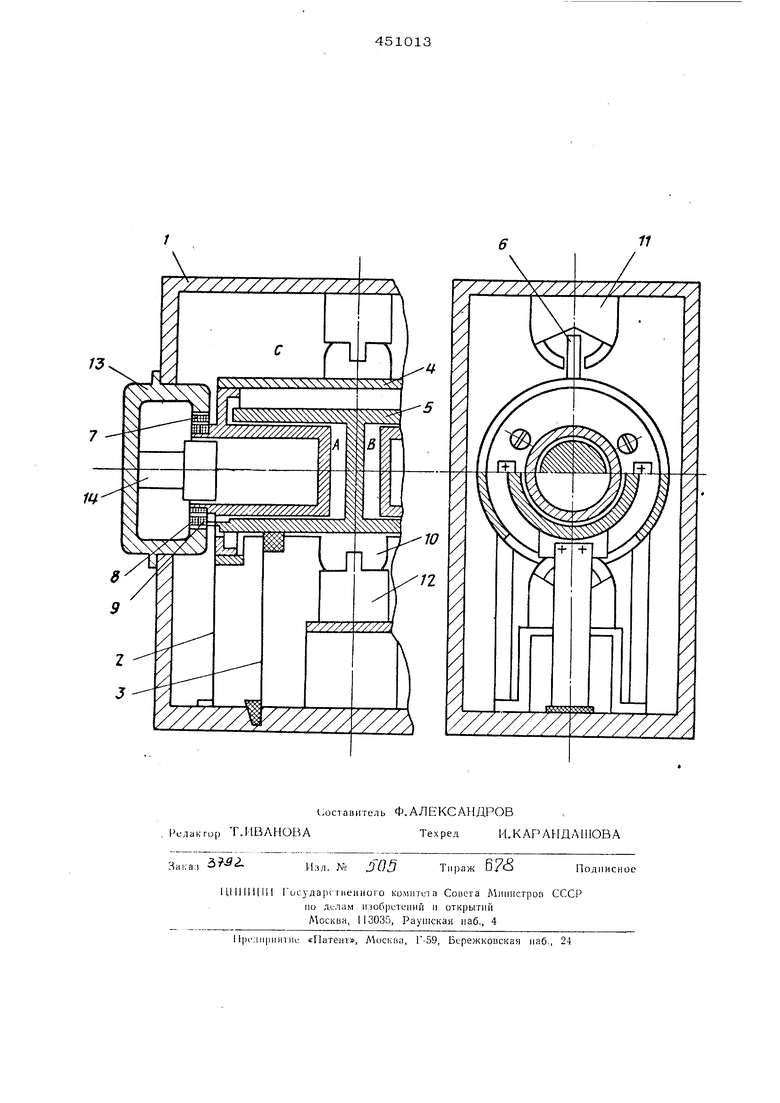
В Kopnyqie 1, заполненном ишдкостью, при помощи упругих элементов 2 и 3 уотановлены инерционное тело 4 и поплавок
5. На инерционном теле укреплены подвижная часть датчика перемещения 6 и обмоткн 7 датчика силы. Цепь компенсационной силовой обратной связи тела образована подключением датчика б через усилитель
к обмотке 7. На поплавке 5 укреплены две дополнительные обмотки 8 и 9, раоположепные в зазоре магнитной системы датчика силы и подвижная часть 10 дат- чика перемелення поплавка относительно
корпуса. Статоры датчиков 11 и 12 перемещения тела и поплавка соответственно закреплены на корпусе 1. Статор датчика силы состоит из магнитопровода 13 и ма- гнпта 14. Дополнительная компенсацией-
ная силовая обратная связь поплавка обр&.зовава подключением датчика перемешетш через усилитель к дополнительной обработ ке 8. :
Вторая дополнительная обмотка 9 под|Кпючена в цепь обмотки 7 датчика силы,
.. ,.. -- - . . - - . - - - - При действии ускорения тело 4 и поплавок 5 смешаются относительно корпуса l. Сигнал с датчика перемешения тела (6 11) через усилитель поступает в обмотки 7 и 9, причем коэффициент усиления выбран таким), чтобы компенсировать инерционную силу, действующую на поплавок, т. е, перемещение поплавка будет равно нулю и сигнал в цепи его обратной связи Ч обмотка 8) будет равен нулю.
При изменении ускорения, т.е. наличии производной от ускорения, тело двигается со скоростью, пропорциональной ускорению. Эта скорость вызывает перепад давлений в полостях АиСиВиС. В результате поплавок смещается и ток в обмотке 8 ,пропорционален первой производной от ускорения.
:ПРЕДМЕТ ИЗОБРЕТЕНИЯ
Датчик скорости изменения ускорения, содержащий инерционное тело, подвешенное
на упругом подвесе в корпусе, заполненном жидкостью, цепь компенсационной силовой обратной связи от датчика перемещения тела относительно корпуса через усилитель к датчику силы с обмоткой, расположенной
на теле, и с неподвижной магнитной системой, поплавок, подвешенный на упругом элементе, и датчик перемещения поплавка, отличающийся тем, что, с целью увеличения точности и уменьшения габаритов, он снабжен дополнительной компенсационной силовой обратной связью от датчика перемещения поплавка относительно корпуса через усилитель к первой дополнительной обмотке датчика силы, расположенной на поплавке в зазоре магнитной системы датчика силы, а вторая дополнительная обмотка датчика силы расположена на поплавке и включена в цепь компенсационной силовой обмотки тела, причем упру-
гий элемент подвеса поплавка связан с корпусом.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПОДВИЖНОГО СОСТАВА, ПОДВЕСА ЧУВСТВИТЕЛЬНОГО ЭЛЕМЕНТА ПОПЛАВКОВОГО МАЯТНИКОВОГО АКСЕЛЕРОМЕТРА И УСТРОЙСТВА ЕГО РЕАЛИЗУЮЩИЕ | 2005 |
|
RU2281874C1 |
| ДАТЧИК СКОРОСТИ ИЗМЕНЕНИЯ УСКОРЕНИЯ | 2015 |
|
RU2580212C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1972 |
|
SU344357A1 |
| Поплавковый измерительный прибор | 1982 |
|
SU1061052A1 |
| Акселерометр | 1980 |
|
SU901916A1 |
| Поплавковый маятниковый компенсационный акселерометр | 1982 |
|
SU1080089A1 |
| СПОСОБ ПОДВЕСА ЧУВСТВИТЕЛЬНОГО ЭЛЕМЕНТА ПОПЛАВКОВОГО ПРИБОРА (ВАРИАНТЫ) И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ (ВАРИАНТЫ) | 2005 |
|
RU2276326C1 |
| СПОСОБ ПОДВЕСА ЧУВСТВИТЕЛЬНОГО ЭЛЕМЕНТА ГИДРОДИНАМИЧЕСКОГО ГИРОСКОПА (ВАРИАНТЫ) | 2004 |
|
RU2270417C1 |
| СПОСОБ ПОДВЕСА ЧУВСТВИТЕЛЬНОГО ЭЛЕМЕНТА ГИДРОДИНАМИЧЕСКОГО ГИРОСКОПА (ВАРИАНТЫ) | 2004 |
|
RU2267746C1 |
| ОСЕВОЙ КОМПЕНСАЦИОННЫЙ ЦИФРОВОЙ АКСЕЛЕРОМЕТР С НЕКОНТАКТНЫМ ПОДВЕСОМ ИНЕРЦИОННОЙ МАССЫ | 1997 |
|
RU2128345C1 |