1
Изобретение относится к области автома тического регулирования и может быть иополЕззовано, например, для коррекции спедзших систем,
Известны следящие системы, содержащие последовательно соединенные измеритель рассогласования, одно или несколько изодромных устройств, исполнительный привод и датчик обратной связи, выход которого связан с вычитающим входом измерителя рассогласования. Каждое изодромное устройство соаержит на выходе сумматор, интегратор и инвертор, выходы которых подключены к соответствующим входам сумматора,
Однако точность работы таких систем ограничена, так как увеличение точности связано с необходимостью уменьшения постоянной времени изодромного устройства, что сказывается на устойчивости следящей си- стемы. Коэффициенты ошибок, следующие за тем коэффициентом, который обращается в нуль, могут не только уменьшаться, но и возрасти того, что в известных системах изощюмные ухггройства вводятся с большой постоянной времени.
Целью изобретения является повышение точности риёоты следяшей системы во всем диапазоне рабочих частот.
Эта цель достигается тем, что следящая система содержит ограничитель и схему выделения сигнала, пропорционального частоте или квадрату частоты, вход которой связан с выходом измерителя рассогласования, выход - со входом ограничителя. Каждое изйдромное устройство содержит два блока нелинейностей и два блока перемножения, к первым входам которых подключены выходы соответствующих блоков нелинейностей. Выход одного блока перемножения связан со входом интегратора, другого - со входом инвертора. Вторые входы обоих блоков перемножения соединены со входом изодромного устройства, а входы всех блоков нелинейностей подключены к выходу ограничителя.
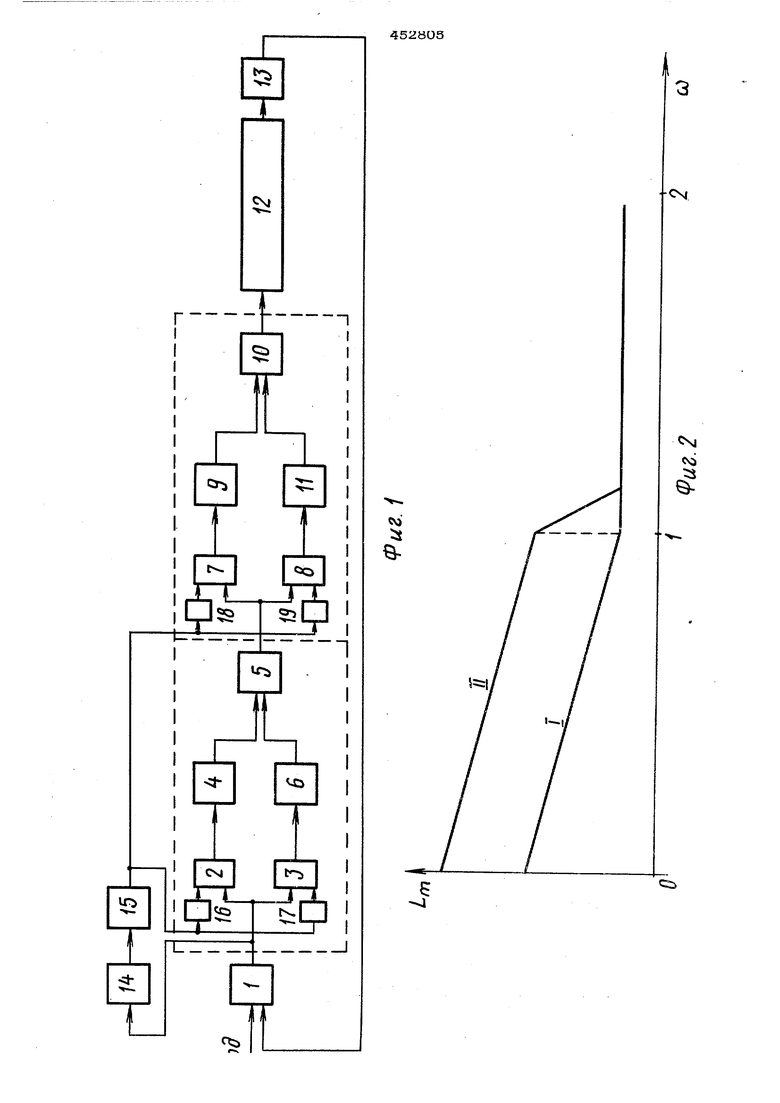
На фш. 1 приведена блок-схема следящей системы с двумя изодромными устройствами. Она содержит измеритель рассогласовав ния 1, блоки перемножения 2, 3, интегратор 4, сумматор 5, инвертор 6, блоки перемножения 7 и 8, интегратор 9, сумматор 10, инвертор 11, исполнительный привод 12, датчик обратной связи 13, схему выделения сигнала, пропорционального частоте (квадрату частоты) 14, ограничитель -15 и блркинелинейностей 16-19. На фиг. 2 изображены амшштудно-ча- стотные характеристики: известной сле дящей системы, II - предложенной следящей системы. Предлагаемая следящая система работае следующим образом. При напряжении на входе измерителя 1 следящей системы, равном нулю, амплитудно-частотная характеристика (АЧХ) разомкнутой следящей системы, определяется. АЧХ не изменяемой части системы на нулевой частоте и АЧХ изодромного устрюйства, ко торое определяется напряжениями на первых входах блоков перемножения 2(7), 3(8), АЧХ интегратора 4(9). и коэффициентами усиления инверторов 6(11) и сум- маторов.5(10). Напряжение на первом входе блока перемножения 2(7) является результатом преобразования напряжения ощибки с помощью схемы 14, блока нелинейности 16 (18). Это напряжение относительно велико Напряжение на первом входе блока перемножения 3(8) является результатом преобразования ощибкк с помощью схемы вь деления сигнала, пропорционального частоте. 14, и блока нелинейности 17(19). Это напряжение относительно мало. При подаче на вход следящей системы напряжения, изменяющегося по гармоническому закону с частотой 6f , напряжение ощибки в виде моногармонического сигнала поступает на вход схемы 14, АЧХ разомкнутой следящей системы определяется АЧХ неизменяемой части следящей системы на частоте и АЧХ изодромного устройства, коэффициенты передачи параллельных ветвей которого определяются напряжениями на первых клеммах блоков перемножения 2, 3, 7 и 8. Эти напряжения определяюгся моногармонической составляющей ошибки, преобразованной устройством, состоящим из схемы вьщеления сигнала 14, ограничителя 15 и блоко1В нелинейностей 16, 17, 18 и 19. При этом в диапазоне частот О tU ii; (условно считаем, что jj соответствует ( достоянной вре- 11 меня изодромного устройства Т ), коэффициент передачи ветви интегратора 4(9) относительно велик, а коэффициент передаче ветви инвертора 6(11) относительно мал. В результате АЧХ изодромно.го устройства соответствует весьма малой постоянной времени изодрома. При этом АЧХ 2 изодрсмного устройства, имеющего регулируемые коэффициенты передани, расположена намного выше, чем АЧХ известного изодромного устройства (фиг.. 2). В результате снижается влияние на ошибку .йледящей системы ФЧХ интегрирующего звена. Кроме того, относительно большой коэ(|ь. фициент передачи цегш интегрирующего звена уменьшает время выбора ощибки, которая должна быть сведена к нулю, увеличивает быстродействие следящей системы при отработке возмущений, место прилознения которьсх находится за изодромнь1м «веном. В диапазоне частот to t02 отключается интегратор 4(9) и увеличивается коэффициент передачи ветви инвертора (6) (11). В результате практически при частотах UJ, больше 1 /Т , в частотную характе- и ристику не вносятся фазовые искажения, увеличивающие коэффициенты ошибок системы и снижающие запас ее устойчивости. Предмет изобретения Следящая система, содержащая последовательно соединенные измеритель рассогласования, изодромные устройства, исполнительный привод и датчик обратной связи, выход которого связан с вычитающим входом измерителя рассогласования, причем каждое из изодромных устройств содержит на выходе сумматор, интегратор и инвертор, выходы которых подключены к соо- Ветствующим входам сумматора, отличак щаяся тем, что, с целью увеличения точности ее работы во всем диапазоне рабочих частот, она содержит ограничитель и схему выделения сигнала, пропорционального частоте, вход которой связан с выходом измерителя рассогласования, выход - со входом ограничителя, в каждом изодромном устройстве два блока нелинейностей и два блока перемножения, к первым входам которых подключены выходы соответствующих блоков нелинейностей, выход одного блока перемножения связан со входом интегратора, другого - со входом инвертора, вторые входы обоих блоков перемножения соединены со входом изодромного устройства, а входы всех блоков нелинейностей подключены к выходу ограничителя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для воспроизведения нелинейности типа петли гистерезиса | 1980 |
|
SU968822A1 |
| Устройство управления вибрационным источником сейсмических сигналов | 1977 |
|
SU661460A1 |
| Следящая система | 1981 |
|
SU962847A1 |
| Нелинейное корректирующее устройство | 1985 |
|
SU1251022A1 |
| СЛЕДЯЩАЯ ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА | 2001 |
|
RU2211462C2 |
| Устройство для управления асинхронным электродвигателем | 1990 |
|
SU1791952A1 |
| УПРАВЛЯЕМЫЙ ГЕНЕРАТОР | 2012 |
|
RU2506692C1 |
| СЛЕДЯЩИЙ ИЗМЕРИТЕЛЬ СКОРОСТИ СБЛИЖЕНИЯ | 1995 |
|
RU2087007C1 |
| Электропривод постоянного тока | 1983 |
|
SU1115188A1 |
| Следящий пъезопривод с коррекцией неоднозначной статической характеристики | 1982 |
|
SU1120279A1 |