1
Изобретение относится к области обработки поверхности листовых материалов в механизированных иоточных линиях известными сгюсобаз1и, нанример механическими или химическими.
Известны захваты-кантователи листовых материалов, содержащие привод с кантующими рычагами, на каждом из которых шарнирно укреплен захватный орган.
Недостатком конструкции известных захватов-кантователей является необходимость периодического захвата и транспортирования пачки листов с использованием специальной грузоподъемной мащины и дополнительной операции для кантования листов.
С целью ускорения процесса кантования в предлагаемом захвате-кантователе кантующие рычаги выполнены Г-образными и жестко установлены на валу, связанном посредством передачи с приводом, а захватный орган выполпен в виде рамки со сквозным пазом для захватываемого листа.
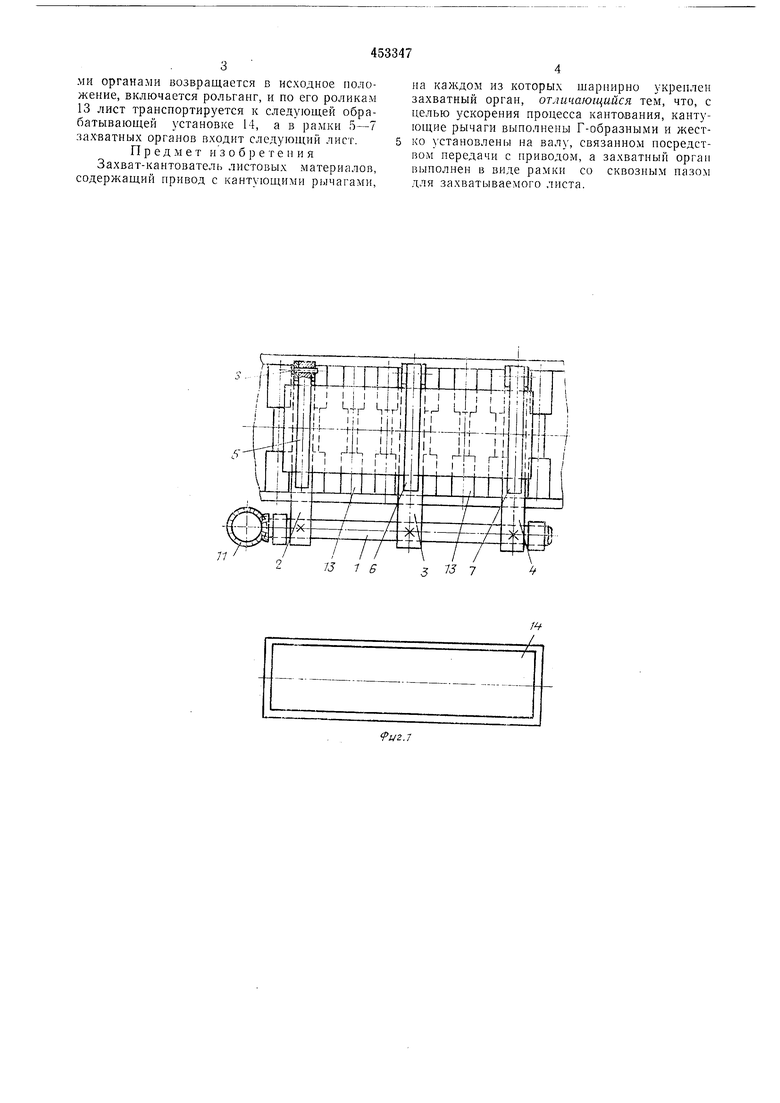
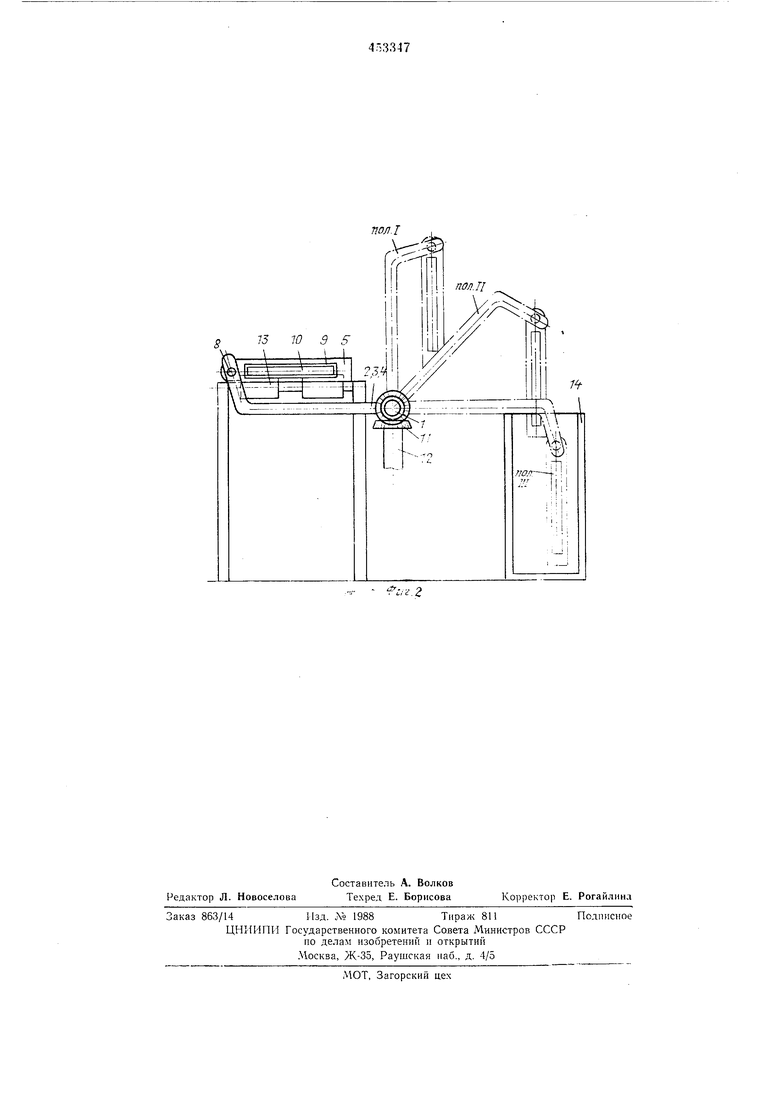
На фиг. 1 изображен предлагаемый захват-кантователь листовых материалов, вид в плапе; на фиг. 2 - то же, вид спереди.
На валу 1 жестко закреплены на равном расстоянии друг от друга кантующие рычаги 2-4 Г-образной формы, на каждом из которых щарнирно укреплен захватный орган, выполненный в виде рамки со сквозным пазом. На рычаге 2 укреплена рамка 5, на рычаге 3 - рамка б, па рычаге 4 - рамка 7. Каждая рамка крепится к рычагу с помощью оси 8 и имеет сквозной паз 9, через который проходит захватываемый лист 10. Количество рычагов с захватными органами может изменяться в зависимости от длины обрабатываемых листов.
Один из концов вала 1 связан посредством зубчатой передачи 11 с валом 12 электропривода (электропривод на чертеже не показан). Каждый захватный орган располагается над роликами 13 рольганга, предназначенного для транспортировки листов к обрабатывающим установкам 14, например к кислотным или очистным ваннам.
Обработку поверхности листов с помощью захвата-кантователя осуществляют следующим образом.
Вал 1 получает вращение через зубчатую передачу 11 при вращении вала 12. При этом кантующие рычаги 2-4 поднимаются вверх, и рамки 5-7 с листом 10 принимают вертикальное положение (фиг. 2, положение 1). При дальнейщем вращении вала 1 захватные органы с листом располагаются в верхней частн установки 14 (фиг. 2, положение Н), а затем опускают вниз (фиг. 2, положение П1). После обработки листов сообщается обратное враще: ие валу 1 электропривода. Лист с захватными органами возвращается в исходное положение, включается рольганг, и по его роликам 13 лист транспортируется к следующей обра батывающей установке 14, а в рамки 5-7 захватных органов входит следующий лист.
Предмет изобретения Захват-кантователь листовых материалов, содержащий нривод с кантующими рычагами.
на каждом из которых шарнирно укреплен захватный орган, отличающийся тем, что, с целью ускорения процесса кантования, кантующие рычаги выполнены Г-образными и жестко установлены на валу, связанном по средством нередачи с приводом, а захватный орган выполнен в виде рамки со сквозным пазом для захватываемого листа.
| название | год | авторы | номер документа |
|---|---|---|---|
| КАНТОВАТЕЛЬ ЛИСТОВ | 1965 |
|
SU171834A1 |
| Кантователь листов | 1985 |
|
SU1473871A1 |
| КАНТОВАТЕЛЬ ЛИСТОВ | 1968 |
|
SU217340A1 |
| СТЕНД ДЛЯ СБОРКИ И ДВУСТОРОННЕЙ СВАРКН ЛИСТОВОГО МАТЕРИАЛА В ПОЛОТНИЩА | 1973 |
|
SU366951A1 |
| Захват-кантователь | 1987 |
|
SU1518270A1 |
| Кантователь проката | 1989 |
|
SU1745387A1 |
| ВОЛОЧИЛЬНЫЙ СТАН для ВОЛОЧЕНИЯ сплошныхи полых ПРОФИЛЕЙ | 1968 |
|
SU212964A1 |
| Захват-кантователь для цилиндрических грузов | 1981 |
|
SU1006357A1 |
| ЗАХВАТ-КАНТОВАТЕЛЬ ДЛЯ ГРУЗОВ ЦИЛИНДРИЧЕСКОЙ ФОРМЫ | 1973 |
|
SU388994A1 |
| Автоматизированный комплекс для обработки листового материала | 1987 |
|
SU1475757A1 |
J 7J 7
пол. I
