1
Известно устройство для передачи грузов между судами на ходу, содержащее несущий канат, один конец которого заведен на лебедку со следящим ггриводом на передающем судне, а другой закреплен на принимающем судне. При этом лебедка со следящим приводом обеспечивает постоянную величину натяжения несущего каната. На несущий канат навешена грузовая тележка, нередвижение которой вдоль несущего каната обеспечивается тяговым канатом, концы которого заведены на барабаны тяговой лебедки или лебедок.
Однако в известном устройстве для постоновки канатной дороги необходимо наличие не менее двух канатов, каждый из которых обслуживается отдельными лебедками со следящим приводом и сложной системой управления. Для передачи грузов по несущему канату служит грузовая тележка, связанная одновременно как с несущим, так и с тяговым канатами, что усложняет технику приема и передачи грузов. Известное устройство не позволяет производить траверзную передачу грузов между судном больщого водоизмещения и малым судном, так как в этом случае на волнении моря возникает оиастность оноркидывания малого судна.
Цель изобретения - упрощение конструкции устройства, снижение его стоимости и повышение безопасности ири работе канатной дороги.
Это достигается тем, что в предлагаемом устройстве единственный в устройстве рабочий канат одним концом заведен на барабан лебедки, установленной на предыдущем судне, а другим концом нроиущен через канатный стопор и систему блоков на принимаюп;ем судне и соединен с букспруемим гидродинамическим
сопротивлением, которое создает необходнмое натяжение каната. Передаваемый груз неподвнжно закреплен на рабочем канате и перемещается вместе с ним в завнсимости от панравления вращения барабана лебедки.
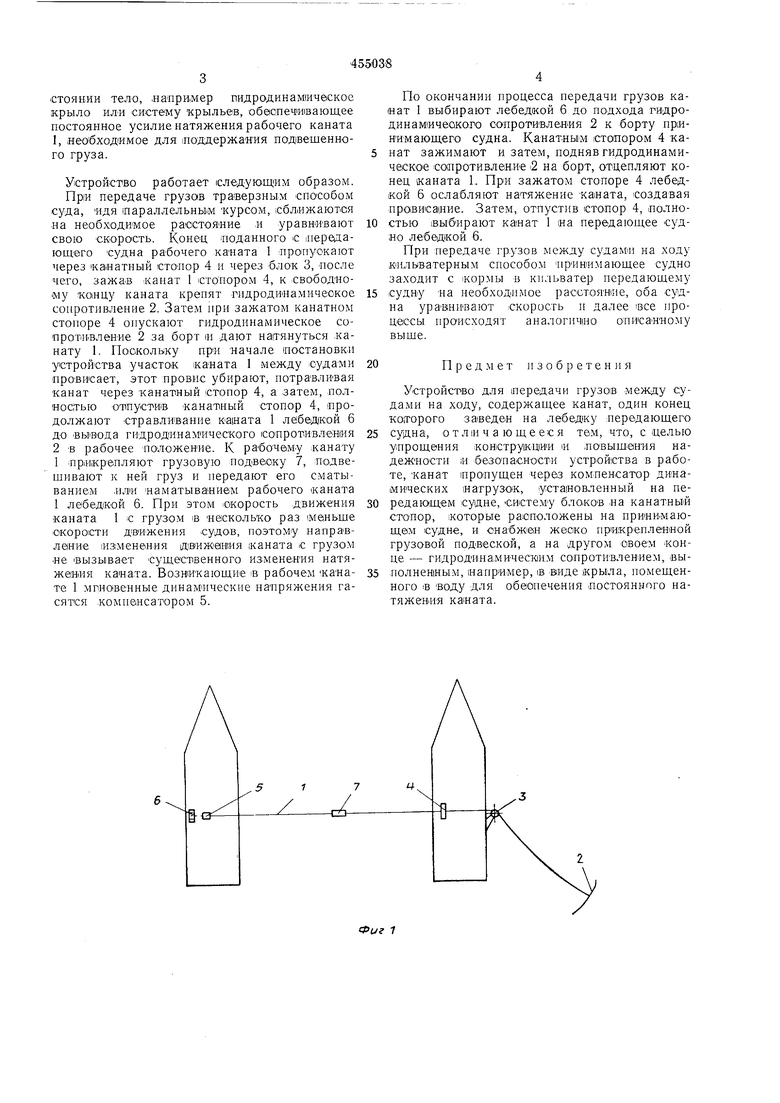
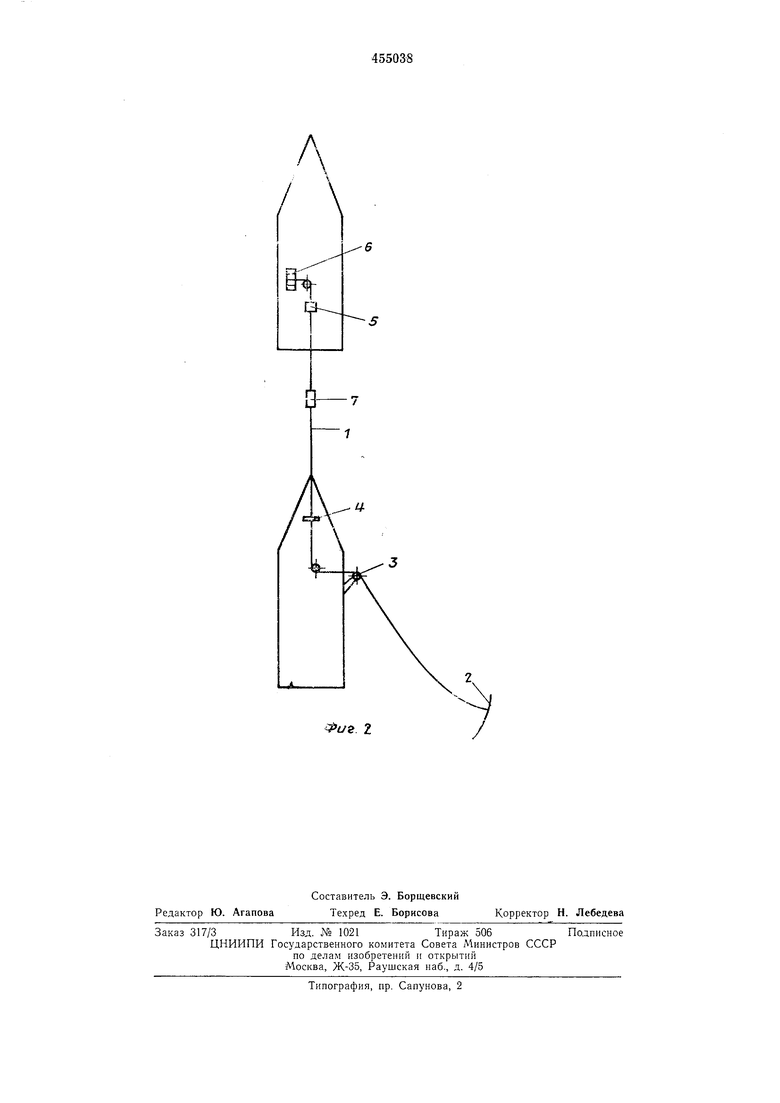
Па фиг. 1 показана схема устройства при движении судов параллельным курсом; на фиг. 2 - то же, при движении судов в кильватер.
Устройство состоит из рабочего каната 1
с закрепленным на одном его коице гидродинамическим сопротивлением 2, блока 3 и канатного стонора 4 на припимающем судне, а также комненсатора 5 динамически.ч нагрузок и лебедки 6 на передающем судне. К
рабочему канату 1 любым известным способом жестко прикреплена грузовая подвеска 7. Компенсатор 5 выполнен в виде нолисиаста ИЛИ гидроцил иидра с блоко.
Г|пдродинам1ическое соиротивленис 2 ирсдставляет собой буксируемое в подводном состоянии тело, аапри.мер пидродинаммческое крыло илИ систему крыльев, обаспечищающее постоянное усилие натяжения рабочего каната 1, необходимое для (поддержания подвешенного груза.
Устройство работает следующим образом.
При передаче грузов траверзпым способом суда, ИДЯ параллельным курсом, 1сбл1ижаются на необходимое расстояние и уравнивают свою скорость. Конец поданного с (передающего судна рабочего каната 1 пропускают через 1ка(натный столор 4 и через блок 3, после чего, зажав канат 1 (стопором 4, к свободному канцу каната крепят гидродинамическое сопротивление 2. Затем при зажатом канатном стопоре 4 опускают гидродинамическое сопротивление 2 за борт 1П дают наая.нуться канату 1. Поскольку при -начале постановкп устройства участок (каната 1 между |0удами провисает, этот провис убирают, потравливая канат через канатный iCTonop 4, а затем, полностьЕО отпустив «анатный стопор 4, (продолжают стравливание Ка|ната 1 лебед|кой 6 до вывода гидрод инам1ического сопротивлеиия 2 -в рабочее положение. К рабочему .канату 1 пр1И|Крепляют грузовую подвеску 7, подвешивают к ней груз и передают его сматыванием .ИЛ1И наматыванием рабочего «аната 1 лебедкой 6. При этом 1окорость движения каната 1 с грузом (в несколько раз меньше окорости движения судов, поэтому направление (И3(менения (каната с грузом «е Вызывает существенного изменения натяжения каната. Возникающие В рабочем канате 1 мгновенные динамические напряжения гасятся компенсатором 5.
По окончании процесса передачи грузов каеат 1 выбирают лебедкой 6 до подхода гидродинам1ичеокаго сопротивления 2 к борту принимающего судна. Канатным (Стопором 4 канат зажимают и затем, подняв гидродинамическое со(ироТивле(НИе 2 на борт, отцепляют конец каната 1. При зажатом стопоре 4 лебедкой 6 ослабляют натяжение каната, создавая провисание. Затем, отпустив стопор 4, полностью (выбирают канат 1 (на передающее Судно лебедкой 6.
При передаче грузов между судами на ходу кильватерным способом принимающее судно заходит с (кормы в кильватер передающему
судну на необходимое расстоян1ие, оба судна уравнивают скорость и далее все процессы происходят аналогич|но описанному выше.
Предмет изобретения
Устройство для передачи грузо(в между судами на ходу, содержащее канат, один конец которого за(веден на лебедку передающего
судна, отличающееся тем, что, с (Целью упрощения 1Констру1кц1И1и (И ловышвния надежности ;и безопасности устройства в работе, канат пропущен через компенсатор динамических (Нагрузок, (установленный на передающем судне, систему блоков па канатный стопор, (Которые расположены на принимающем судне, и Снабжен жвоко прикрепленной грузовой подвеской, а на другом своем конце - гидродина,мическ1им сопротивлением, выполненным, например, IB виде крыла, помещенного в воду для обеспечения постоянного натяжения каната.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для передачи грузов между судами | 1972 |
|
SU439438A1 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА СУДОВОГО КРАНА | 2003 |
|
RU2262464C2 |
| СУДОВОЙ КРАН | 2002 |
|
RU2241633C2 |
| Устройство траверзной передачи груза | 1984 |
|
SU1240680A1 |
| Комплекс аварийной эвакуации на лёд персонала и экипажа морских платформ | 2019 |
|
RU2720757C1 |
| Устройство для передачи жидкого груза в море с судна на судно | 1981 |
|
SU981090A1 |
| Гидроподъемник для приема передачи груза с канатной дороги | 1976 |
|
SU686935A1 |
| Лебедка для передачи грузов с судна на судно | 1977 |
|
SU695958A1 |
| Система экстренной эвакуации персонала морских платформ в ледовых условиях | 2019 |
|
RU2718799C1 |
| Устройство для передачи людей и грузов в море | 1976 |
|
SU602404A1 |
.51
Фи Z
