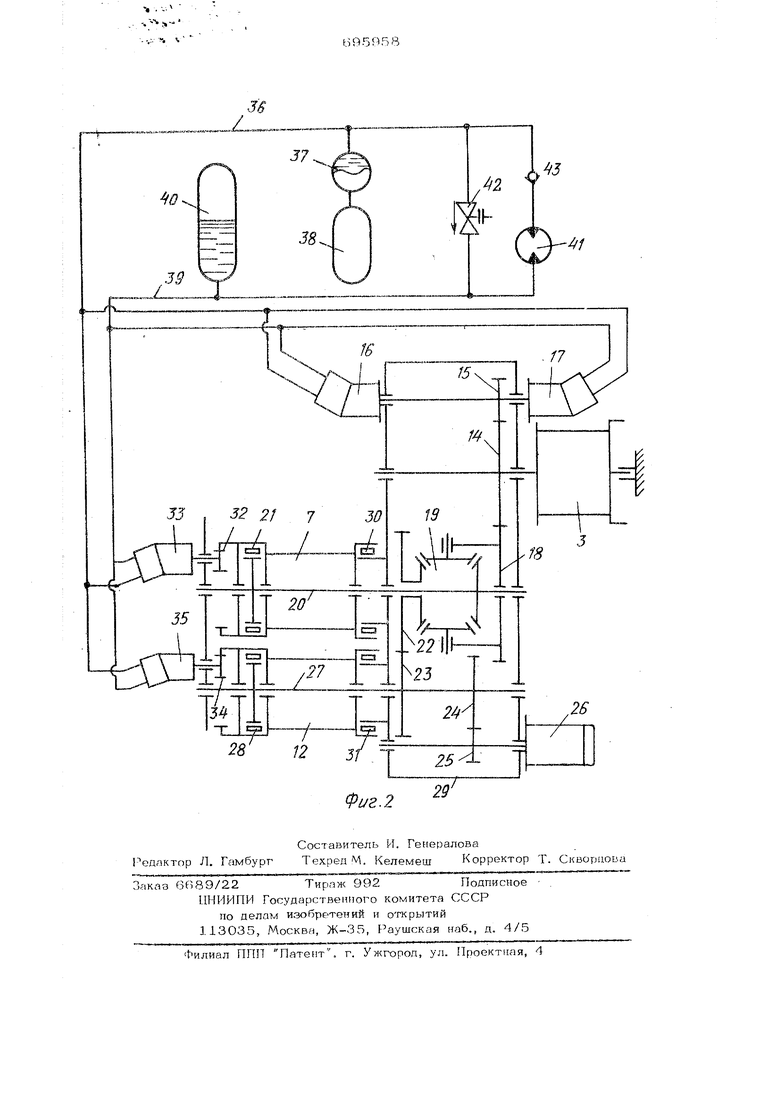
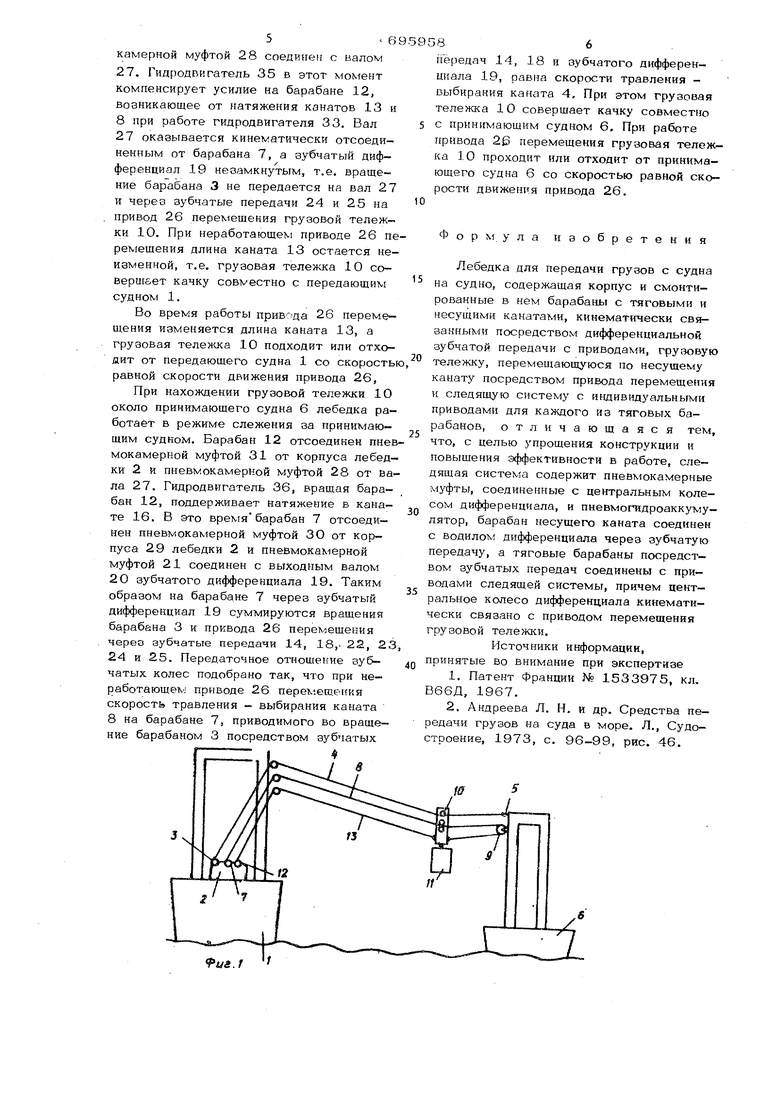
Изобретение относится к устройствам передачи сухих грузов с судна на судно в море на ходу с помощью траверсной канатной дороги. Известно устройство для передачи сухих грузов с помощью траверсной канатной дороги, содержащее лебедку с тяговыми канатами, запасованными через бло ки, установленные на мачтах передающего и принимающего судов, грузовую теле ку, перемещающуюся на катках по верхнему тяговому канату, измерительный ка нат с натяжным устройством l Однако это устройство сложно и трудоемко в изготовлении из-за наличия двух дифференциалов. Наиболее близким техническим решением к предложенному является лебедка для передачи грузовс судна на судно, содержащая корпус и смонтированные в нем барабаны с тяговыми и несущими ка натами, кинематически связанными посредством дифференциальной зубчатой передачи с приводами, грузовую тележку. перемещающуюся по несущему канату посредством привода перемещения, и еле- Д5пцую систему с индивидуальными приводами для каждого из тяговых барабонов Недостатком этой лебедки является сложность конструкции, обслуживания и неэффективность в работе. Целью настоящего изобретения является упрощение конструкции лебедки и повыщение ее эффективности в работе. Для этого следящая система содержит пневмокамерные муфты, соединенные с центральным колесом дифференциала и пневмогидроаккумулятор, барабан несущего каната соединенный с врдилом дифференциала через зубчатую передачу, а тяговые барабаны посредством зубчатых передач соединены с приводами следящей системы, причем центральное колесо дифференциала кинематически связано с приводом перемещения грузовой тележки. На фиг. 1 изображено расположение канатов и лебедки при траверсной пере- 3G даче грузов; на фиг, 2 - принципиальные кинематическая и пневмогидравлическан схемы лебедки. На ие| 1гдаюшем с,удне 1 установлена лебедка 2. От барабана 3 ледедки 2 йатянут несущий канат 4, который крепится к устройству экстренЕюй отдачи 5 на при нимающем судне 6. От барабана 7 натянут тяговый канат 8, который, огибая блок 9, расположенный на принимающем судне б, крепится к грузовой тележке 10 :На которой подвешен передаваемый груз 11. От барабана 12 натянут тяговый Канат 13, прикрепленный к грузовой тележке 10. Вращением барабанов 7 и 12 проигзводится наматывание или сматывание тяговых канатов 8, 13 и перемещение грузовой тележки ог одного судна к друг ому. Барабан 3 через зубчатые колеса 14 и 15 соединен -с гидродвигателями 16 и 17, а через зубчатые колеса 14 и 18 - с зубчатым дифференциалом 19. Выходной вал 2О дифференциала 19 с помощью пневмокамерной муфгы 21 соединяются с барабанами 7, Кроме того, дифференциал 19 через зубчатые колеса 22, 23, 24 и 25 соединен с приводом 26 перемещения грузовой тележки 10. Зубчат з1е колеса 23 и 24 неподвижно соединены с валом 27, который связан посредством пневмокамерной муфты 28 с барабаном 12. Все зубчатые передачи и дифференциал смонтированы в корпусе 29 лебед ки 2. Барабаны 7 и 12 с помощью пневмокамерных муфт 30 и 31 могут загормаисиваться, соединяясь с корпусом 2Ё) лебедки 2. Барйбан 7 через зубчатую шестерню 32 соединен с гидродвигателем 33. Барабан 12 через зубчатую шестерн 34 соединен с гидродвигателем 35.Одна из полостей гидродвигателей 16, 17, 33 и 35 трубопроводом 36 соединяется с масляной полостью пневмогидроаккумуля тора 37, воздушная полость которого соединена с баллоном 38 воздуха высокого давления. Другая полость гидродв н гателей 16,17,33 и 34 трубопроводом 39 соединена с масляным резервуаром 40, в котором имеется небольщое избыточное давление, и с насосом 41, предназначенным для компенсации обьемных потерь гидродвигателей 16,17,33и35, а также для гидравлической компенсации изменения расстояния между судами при Их рыскании на курсе, В гидросистеме устаноапены предохранительный клапан 8.4 42 и обратный клапан 43, нредотвращаюший подачу масла из трубопровода 36 с в юоким давлением. Лебедка 2 работает в устройстве передачи грузов в двух автоматически режимах сложения: за нере-дающ.км судном 1 и за принимающим судном 6. В режиме слежения аа передающим судном 1 грузовая теленжа 10 повторяет движение (качку) судна и плавно подходит к нему или отходит от него со скоростью, определяемой приводом 26 перемещения. В режиме слежения за принимающим судном 6 грузовая тележка 10 повторяет движение (качку) этого судна и так же плавно подходит и отходит от него со скоростью, определяемой приводом 26 перемещения. При качке судов 1 и 6 в сторону друг друга точки подвеса каната 4 сближаются. При этом .гидродвигатели 16 и 17 под действием давления масла, подаваемоixi иаттаевмогидроаккумулятора 37 но трубопроводу 36, начинают вращать барабан § в сторону выбирания несущего каната 4. Отработанное в гидродвигателях 16 и 17 масло поступает в резервуар 40. При качке судов 1 и 6 в сторону, противоположную друг другу, точки подвеса несущего каната 4 расходятся и усилие в канате увеличивается. Это усилие преодолевает момент. Создаваемый гидродвигателями 16 и 17 под действием давления iv-acла, подаваемого из пневмогидроаккумулятора 37, и канат 4 начинает сматываться с барабана 3. Гидродвигатели 16 и 17 работают в этот период в режиме насосов, засасывая масло из резервуара 40 и нагнетая его в пневмогидроаккумулятор 37. Таким образом при качкесудов 1 и 6 происходит перекачивание масла из пневмогидроаккумулятора 37 в резервуар 40 и обратно. При нахождении грузовой тедежки 10 около передающего судна 1 (режим работы - слежение за передакэщим судном) барабан 7 отсоединен пневмокамерной муфтой 30 от корпуса 29 лебедки 2 и пневмокамерной муфтой 21 от вала 20. При этом гидродвигатель 33 под действием давления масла, поступающего по трубопроводу 36 из пневмогидроаккумулятора 37, вращает барабан 7 на выборку каната 8, поддерживая в нем натяжение и одновременно компенсируя его длину при качке судов 1 и 6. Барабан 12 отсоединен пневмокамерной муфтой 31 от корпуса 29 лебедки 2 и пневмокамерной муфтой 28 соединен с валом 27. Гидродвигатель 35 в этот момент компенсирует усилие на барабане 12, Возникающее от натяжения канатов 13 и 8 при работе гидродвигателя 33, Вал 27 оказывается кинематически отсоединенным от барабана 7, а зубчатый дифференциал 19 незамкнутым, т.е. вращение барабана 3 не передается на вал 27 и через зубчатые передачи 24 и 25 на привод 26 перемещения грузовой тележки 10. При неработающем приводе 26 пе ремещения длина каната 13 остается неизменной, т.е. грузовая тележка 10 совершает качку совместно с передающим судном 1. Во время работы привода 26 перемещения изменяется длина каната 13, а грузовая телехжа 10 подходит или отходит от передающего судна 1 со скорость равной скорости движения привода 26, При нахождении грузовой тележки 10 около принимающего судна 6 лебедка работает в режиме слежения за принимаЕО- щим судном. Барабан 12 отсоединен пне мокамерной муфтой 31 от корпуса лебед ки 2 и пневмокамерной муфтой 28 от ва ла 27. Гидродвигатель 36, вращая барабан 12, поддерживает натяжение в канате 16. В это времябарабан 7 отсоединен пневмокамерной муфтой ЗО от корпуса 29 лебедки 2 и пневмокамерной муфтой 21 соединен с выходным валом 20 зубчатого дифференциала 19. Таким образом на барабане 7 через зубчатый дифференциал 19 суммируются вращения барабана 3 и привода 26 перемещения черео зубчатые передачи 14, 18,- 22, 2 24 и 25. Передаточное отнощение зубчатых колес подобрано так, что при неработающем приводе 26 перемещения скорость травления - выбирания каната 8 на барабане 7, приводимого во вращение барабаном 3 посредством зубчатых передач 14, 18 и зубчатого дифференциала 19, равна скорости травления выбирания каната 4, При этом грузовая тележка 10 совершает качку совместно с принимающим судном 6. При работе привода 2g перемещения грузовая тележка 10 проходит или отходит от принимающего судна 6 со скоростью равной скорости движения привода 26. Формула изобретения Лебедка для передачи грузов с судна на судно, содержащая корпус и смонтированные в нем барабаны с тяговыми и несущими канатами, кинематически свяьзаяными посредством дифференциальной зубчатой передачи с приводами, грузовую тележку, перемещающуюся по несущему канату посредством привода перемещения к следящую систему с индивидуальными приводами для каждого из тяговых барабанов, отличающаяся тем. что, с целью упрощения конструкции и повыщения эффективности в работе, следящая система содержит пневмокамерные муфты, соединенные с цe rгpaльным колесом дифференциала, и пневмогидроаккуму- лятор, барабан несущего каната соединен с водилом дифференциала через зубчатую передачу, а тяговые барабаны посредством зубчатых передач соединены с приводами следящей системы, причем центральное колесо дифференциала кинематически связано с приводом перемещения грузовой тележки. Источники информации, принятые во внимание при экспертизе 1.Патент Франции № 1533975, кл, В66Д, 1967. 2,Андреева Л. Н. и др. Средства передачи грузов на суда в море. Л., Судостроение, 1973, с. 96-99, рис. 46.
.t
1В
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА СУДОВОГО КРАНА | 2003 |
|
RU2262464C2 |
| Судовая канатная дорога | 1977 |
|
SU677989A1 |
| Система передачи грузов с судна на судно | 1982 |
|
SU1041402A1 |
| СУДОВОЙ КРАН ДЛЯ БЕЗУДАРНОЙ ПЕРЕГРУЗКИ ГРУЗОВ НРИ КАЧКЕ | 1971 |
|
SU417340A1 |
| Система для безударной передачи груза с судна на судно в условиях волнения моря | 1982 |
|
SU1030249A1 |
| Система для безударной передачи гРузА C СудНА HA СудНО B уСлОВияХВОлНЕНия МОРя | 1979 |
|
SU816867A1 |
| Устройство для спуска и подъема людей и грузов с судна на судно в море | 1976 |
|
SU660889A1 |
| Судовая лебедка | 1958 |
|
SU119446A1 |
| СУДОВОЙ КРАН | 2002 |
|
RU2241633C2 |
| Лебедка | 1976 |
|
SU626027A1 |