1
Предлагаемое изобретение относится к электроприводам и касается способа частотного регулирования скорости вращения асинхронного двигателя (АД), обеспечивающего режим поддержания постоянства абсолютного скольжения ротора.
Такой режим работы близок к режиму минимальных потерь, но легче в осуществлении. Он применяется в приводах, длительно работающих при частотах, отличных от номинальной, где энергетические показатели привода играют существенную роль (например, в системах электродвижения судов нри питании гребного асинхронного двигателя от автономного генератора).
Известен снособ обеспечения режима работы АД с иснользованием таходатчика, измеряющего скорость вращения ротора. Сигнал таходатчика вычитается из сигнала, пропорционального скорости вращения поля статора, и результирующий сигнал, пропорциональный абсолютному скольжению ротора АД (разность скорости вращения поля статора и скорости вращения ротора), сравнивается с эталонным сигналом, изображающим заданное абсолютное скольжение. Разность этих сигналов подается на регулятор напряжения и таким образом поддерживается постоянство абсолютного скольжения ротора АД.
Недостатками способа поддержания постоянства абсолютного скольжения ротора АД являются:
а)необходимость таходатчика, измеряющего скорость вращения ротора АД. В ряде случаев (например, в системах электродвижения с гребными двигателями, вынесенными за корпус судна) применение таходатчика крайне нежелательно или даже невозможно;
б)необходимость больщой точности при измеренни скорости вращения поля статора и
скорости вращения ротора во всем диапазоне регулирования скорости вращения АД; абсолютное скольжение ротора - это разность двух величин, отличающихся одна от другой
на 1-2%, поэтому для измерения абсолютпого скольжения с точностью примерно до 10% точность измерення скоростей вращения ротора и ноля статора должна быть не меныпе 0,1%.
Цель изобретения-упростить регулирование.
Указанная цель достигается тем, что за эталонный сигнал принимают сигнал, пропорциональный произведению тока статора на частоту.
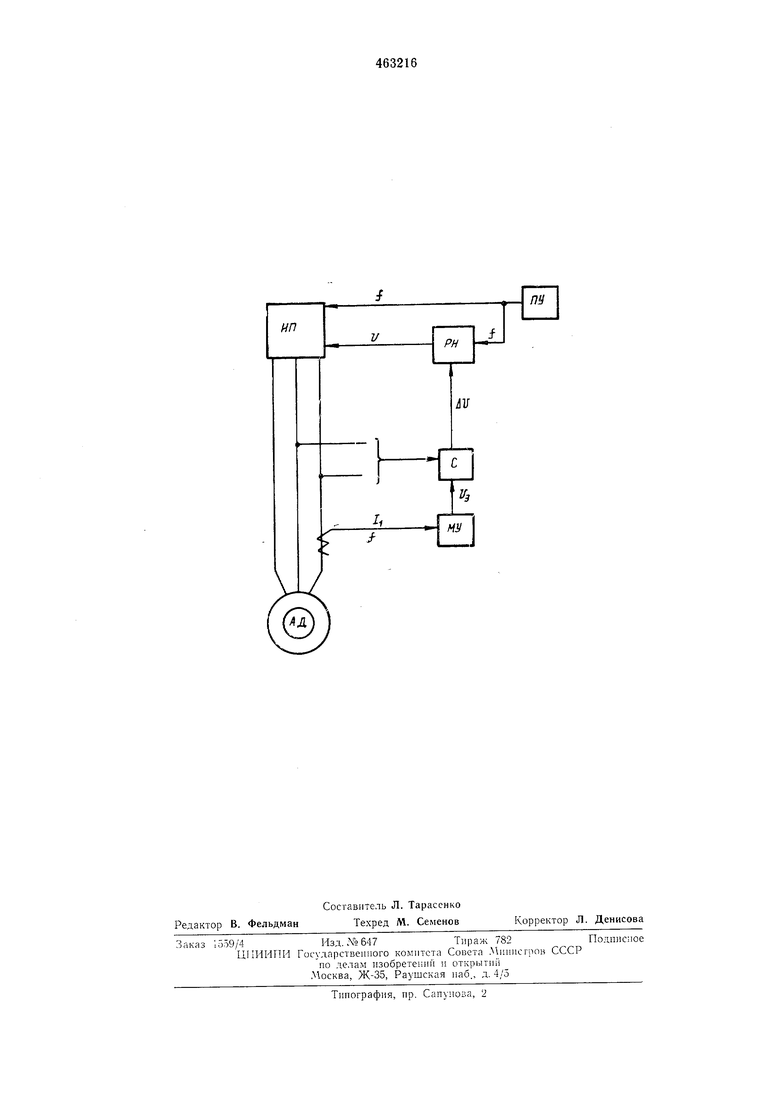
Для пояснения предлагаемого способа на чертеже представлена схема управления асинхронным двигателем, где ИП - источник питания, имеющий два канала управления:
I - по частоте и U - по напряжению; АД - ПУ - пост управлсасинхронный двигатель МУ-- множительное ПИЯ, задающий частоту устройство, выход11ая которого величина U:,fi /ь С - устройство сравнения; РН--регулятор нанряжеипя. Из обычной Т-образной схемы замещения АД, если пренебречь активным сопротивлением статорной обмотки, ток в фазе статора равенЛ-у-Гп №), га,е и - напряжение, подводимое к статору / - частота этого напряжения; /п - номинальная частота; cp(i(3)-функция от абсолютного скольжения (Р), имею1 1 ;Я размерность проводимости. Коэффициенты этой функции образуются из активных и индуктивных сопротивлений схемы замещения АД при номипальной частоте питающего напряжения и являются постоянными величипами. Из (1) следует, что для получения |3 const (а следовательно, и ф(р)сопз1) к статору двигателя необходимо подводить панряжение ,.f, 1 где й -постоянная величина. Пренебрежение сонротивлением статорпой обмотки допустимо для крзнных асинхронных двигателей (порядка 300 квт и выше) до частот 0,2-0,3 поминальной, для более мелких - до частот порядка 0,2-0,5 номинальпой. Согласно сделанному выводу унравлеш-ю асинхронным двигателем осуществляется слсдуюпиП образом. Посто.м управления ПУ задается сигнал /, определяющий частоту выходного напряжения РШ, и через регулятор напряжения РИ пропорциональный ему , определяющий велнч111 у панряжеппи. 1ножительное устройство выдает сщ-иал t/o, процорциональный нроизведению тока /1 статорной цепц па частоту н этот сц.нал сравнивается с величиной напряжения сети f/c. Разность этих величин подается па регулягор напряжения. Если Us больще Uc, то регу/1ятор папряжения увеличивает сигнал f/ц выходпое напряжение UQ источпика питания увеличивается. Таким образом обеснечивается поддержание такого напряжения, нри котором абсолютное скольжение ротора АД остается ностояиным независимо от нагрузки. Множительное устройство МУ нредставляет простейщцй элемент, состоящий из последовательно соединенных активного сопротивления н индуктивности. Активное сопротивление в 8-10 раз больще индуктивного сопротивления при номипальной частоте, поэтому .можно считать, что ток, текущий по сопротивлениям, определяется только активным сопротивлением и приложенным напряжением. Если приложенпое папряжение нропорциопальпо току двигателя, то падепне напряжения на индуктивном сопротивлении пропорциопальпо произведепию тока дви1ателя па частоту. Иитанне такого устройства производится от трансформатора тока. Предмет изобретения Способ частотпого управления асппхронпым электродвигателем с поддержанием постоянства абсолютного скольжения ротора, заключающийся в сравнеппи напряжения па статоре электродвигателя с эталонным сигнаЛОЛ1 и воздействием сигналом, пропорциональным их разности па подводимое к электродви1-ателю напряжение, о т л и чающийся тем, что, с целью угтроще1и я р-ег лировапия, в качестве этало пюго сигнала используют произведение частоты тока статора па его величину.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ СТАТИЧЕСКИМ ПРЕОБРАЗОВАТЕЛЕМЧАСТОТЫ | 1968 |
|
SU218290A1 |
| Способ управления асинхронным двигателем с фазным ротором | 1987 |
|
SU1408516A1 |
| УСТРОЙСТВО ИСПЫТАНИЙ ЧАСТОТНО-УПРАВЛЯЕМОГО ГРЕБНОГО ЭЛЕКТРОПРИВОДА СИСТЕМЫ ЭЛЕКТРОДВИЖЕНИЯ В УСЛОВИЯХ СТЕНДА | 2011 |
|
RU2462728C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЧАСТОТНО-РЕГУЛИРУЕМЫМ ЭЛЕКТРОПРИВОДОМ | 2007 |
|
RU2331152C1 |
| СПОСОБ ЧАСТОТНОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 2016 |
|
RU2626325C1 |
| Частотно-регулируемый электропривод | 1985 |
|
SU1288887A1 |
| Устройство для контроля скорости асинхронного двигателя | 1989 |
|
SU1737342A1 |
| Способ измерения скольжения многофазного асинхронного электродвигателя и устройство для его реализации | 1983 |
|
SU1137389A1 |
| Способ управления электроприводом переменного тока и устройство для его осуществления | 1976 |
|
SU656175A1 |