Известный способ управления статическим преобразователем частоты путем изменения задающего напряжения и частоты в зависимости от полного тока статора двигателя не позволяет получить высокой надежности и устойЖивости системы при переходных процессах.
Особенностями предлагаемого способа является то, что, с целью повышения надежности и устойчивости в переходных процессах, выделяют активную составляющую указанного полного тока, вычитают ее значение из значения полного тока, сравнивают сигнал, пропорциональный этой разпости, с сигналом задающего напряжения, а полученным в результате сравнения сигналом воздействуют на задающую частоту.
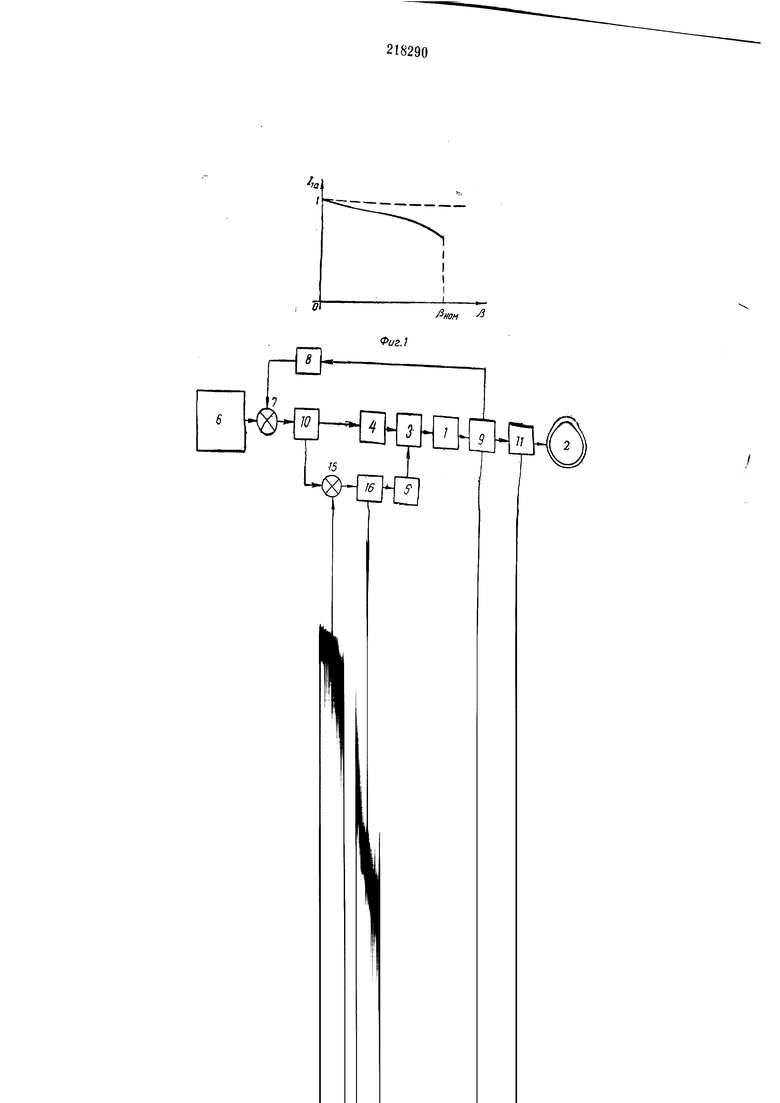
На фиг. 1 представлен график функциональной зависимости активной составляющей тока
статора /и от р - при
постоянном абсо/Н
лютном скольжении Аш const и постоянном полном токе статора h const; па фиг. 2 - вариант блок-схемы частотного электропривода, реализующего данный способ.
Частотный электропривод содержит статический преобразователь частоты / и двигатель 2. Система управления 3 преобразователем частоты управляется регулятором напряжения 4 и регулятором частоты 5. Задающее устройство 6 воздействует па регулятор напряжения
4 через блок сравнения 7 с сигналом блока обратной связи 8 по току, снимаемому с датчика тока 9, и через задатчик напряжения Ю. Датчик и выделяет из полного тока активную составляющую, которая воздействует на регулятор 5 через блок сравнения J2 с сигналом от датчика 9 и функционального преобразователя 13, через переключатель 14, блок сравнения 15 с сигналом от задатчика напряжения 0 и через задатчик частоты 16.
Как известно из теории частотного управления асинхронными двигателядги, для поддержания постоянного момента двигателя 2 в переходных процессах необходимо постоянство 5 тока ротора и величины абсолютного скольжения (разности угловой скорости вращения магнитного поля статора и угловой скорости вращения ротора).
Если допустить, что сопротивление контура
0 намагничивания пропорционально частоте приложенного напряжения, то при постоянных абсолютном скольжении и токе ротора, ток статора /i так же должен быть неизменным.
5 При поддержании постоянны.м тока статора абсолютное скольжение (со - (Од А(:о) постоянно, если сохраняется некоторая определенная функциональная зависимость активной составляющей тока статора /и и частоляется параметрами двигателя и заданной величиной абсолютного скольжения.
Вид функциональной зависимости /ь Ф(Р),
при Асо const и /i const, для двигаL /и J
тел ей единой серии приведен на фиг. 1.
Таким образом, для поДлДержаиия постоянного момента двигателя в переходных режимах система уиравления должна содержать жесткие отрицательные обратные связи но току и но активной составляющей тока двигателя.
Схема уиравления работает следующим образом.
Устройство 6 задает нужную механическую характеристику, т. е. величииы напряжения и чаетоты, которые преобразователь / должен обеспечивать после окончания переходного процесса. В первый момент к задатчику напряжения 10 прикладывается все напряжение с блока 6, поэтому большой сигнал поступает на задатчикн напряжения 10 и частоты 16, н преобразователь 1 подает напряжение на двигатель 2. Как только ток статора достигает заданной величины, отрицательная обратная связь по току резко снижает величину сигнала на входе задатчика 10 и, следовательно, сннжаетея нанряженне на выходе преобразователя 1. Понижение выходного сигнала на задатчике 10 снижает сигнал на входе задатчика 16. Кроме того, на величину входного сигнала задатчика 16 существенно влияет отрицательная обратная связь по актнвпой составляющей тока статора.
Сигнал по активной составляющей тока сопоставляется с выходным сигналом преобразователя /5, который воспроизводит зависимость /1а ф(Р), рассчитанную из параметров двигателя 2 и заданной величины абсолютного скольжения. Если на выходе блока 12 отсутствует сигнал (т. е. /la действительный равен /1а расчетному),абсолютное скольжение двигателя равно расчетному. При отклонении величины абсолютного скольжения от задаиной появляется сигнал разности токов (/la действит. - /1а расчетного) соответствующего знака, который через переключатель 14 поступает па вход задатчика 16.
Таким образом, наличие двух отрицательных обратиых связей (но току статора и но его актиБпой составляющей) о переходных режимах регулирует частоты и напряжения при /1 const и До) const, в результате чего сохраняется постоянство электромагнитного момента двигателя 2.
Переключатель 14 изменяет знак сигнала разиости активной действительной и расчетной составляющих тока статора в режиме торможения. Уменьшение разности сигналов /ai действительных и расчет 1ых во время разгона должно увеличивать, а во время торможения- умег1ьшить частоту питания двигателя 2.
Для устойчивой работы привода в статическом режиме иеобходимо при помощи переключателя 14 отключить обратную связь но разности токов. Обратная связь но току на блоке 8 исчезает
автоматически, как только ток статора становится меньше заданного, что происходит после выхода двигателя 2 на заданиую механическую характеристику. Таким образом, выход блока 8 может давать команды на выключение или включение переключателя 14.
Для перевода привода из двигательного режима в тормозной необходимо снециальное устройство, которое должно нринимать команду иа торможение и обеспечивать изменение знака выходной величины пеоеключателя 14.
Предмет изобретения
Способ управления статическим преобразователем частоты путем изменения задающего напряжения и частоты в зависимости от полного тока статора двигателя, отличающийся
тем, что, с целью новышения надежности и устойчивости при переходных процессах, выделяют активную еоетавляющую указанного полного тока, вычитают ее значение из значения полного тока, сравнивают сигнал, нропорщюнальный этой разности, с сигналом задающего напряжения, а полученным в результате сравнения сигналом воздействуют на задающую частоту.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Устройство для частотного управления асинхронным электроприводом | 1980 |
|
SU907751A1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1990 |
|
SU1746507A1 |
| Частотно-регулируемый электропривод | 1991 |
|
SU1823125A1 |
| Частотно-регулируемый асинхронный электропривод | 1981 |
|
SU1046891A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЦИФРОВЫМ ЧАСТОТНО-РЕГУЛИРУЕМЫМ ЭЛЕКТРОПРИВОДОМ | 2013 |
|
RU2543970C1 |
| Устройство для регулирования асинхронного двигателя | 1983 |
|
SU1202006A1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1990 |
|
SU1758823A1 |
| Устройство для управления асинхронным электродвигателем | 1984 |
|
SU1275731A1 |