Работа устройства подразделяется на две фазы. Первая фаза - калибровка устройства или режим масштабирования, вторая фаза - непосредственное определение постоянных времени. Калибровка устройства осуществляется тогда, когда ток, протекающий через инерционное звено 3, достигнет установившегося значения. В этом случае, изменяя коэффициент передачи Ki по каналу I, добиваемся максимального показания измерительного прибора 4 (операционный усилитель работает в масштабном режиме), а затем, изменяя коэффициент 2, добиваются нулевого показания измерительного прибора. После этой операции устройство откалибровано и можно приступить к определению постоянной времени инерционного звена 3. Для этого необходимо рубильником 7 разорвать цеиь питания и после прекращения переходного процесса в инерционном звене, содержащем индуктивность, снова скачком подать .напряжение на вход инерциониогО звена. Теперь После окончания переходного процесса на выходе сумматора-интегратора 2 появится сигнал ( где иэ(1)-эталонное напряжение на выходе порогового элемента 1; f/iBbix(0-входное напряжение сумматора-интегратора 2 по каналу I. Учитывая, что перед измерением масштабированием выставляется значение U(t) , const, д -Ь +
1 1,
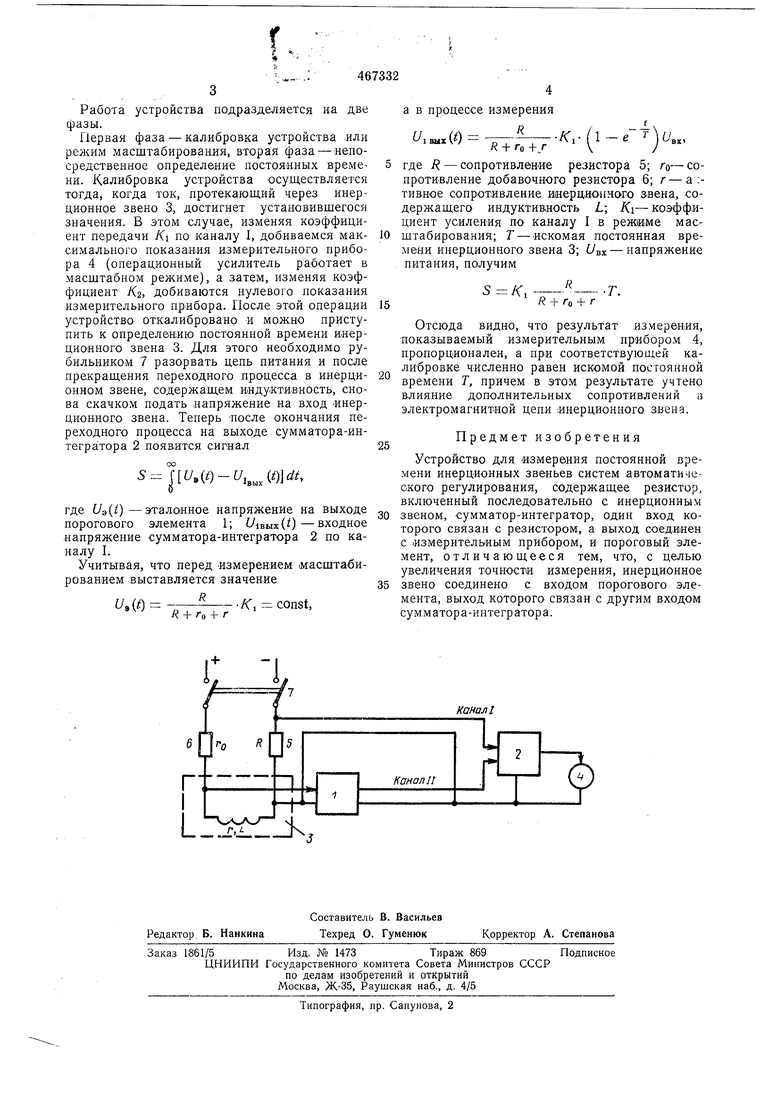
467332 а в процессе измерения f.x(0---- R + ГО +f где R - сопротивление резистора 5; го- сопротивление добавочного резистора 6; г-а :тивное сопротивление внерционного звена, содержащего индуктивность L; Ki- коэффициент усиления по каналу I в режиме масштабирования; Г-искомая постоянная времени инерционного звена 3; (Увх-напряжение питания, получим R + r + r Отсюда видно, что результат измерения, показываемый измерительным прибором 4, пропорционален, а при соответствующей калибровке численно равен искомой постоянной времени Т, причем в этом результате учтено влияние дополнительных сопротивлений в электромагнитной цепи инерционного звена. Предмет изобретения Устройство для измерения постоянной времени инерционных звеньев систем автоматического регулирования, содержащее резистор, включенный последовательно с инерционным звеном, сумматор-интегратор, один вход которого связан с резистором, а выход соединен с измерительным прибором, и пороговый элемент, отличающееся тем, что, с целью увеличения точности измерения, инерционное звено соединено с входом порогового элемента, выход которого связан с другим входом сумматора-интегратора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения постоянной времени корректирующих звеньев | 1980 |
|
SU930277A2 |
| Устройство для измерения электромагнитной постоянной времени якорной цепи электродвигателя | 1977 |
|
SU736278A1 |
| Способ определения электромагнитнной постоянной времени якорной цепи электродвигателя постоянного тока | 1975 |
|
SU608232A1 |
| Устройство для определения электромагнитной постоянной времени якорных цепей двигателя | 1975 |
|
SU661513A1 |
| Устройство для определения электромагнитной постоянной времени якорных цепей двигателя | 1979 |
|
SU911476A2 |
| Устройство для измерения параметров звеньев систем регулирования | 1985 |
|
SU1264141A1 |
| Устройство для определения электромагнитного момента асинхронного двигателя | 1990 |
|
SU1770785A1 |
| Устройство для определения постоянных времени нестационарных инерционных звеньев | 1974 |
|
SU551613A1 |
| Устройство для автоматического измерения сопротивления заземления | 1983 |
|
SU1128195A1 |
| Устройство для измерения параметров линейных динамических объектов | 1979 |
|
SU864251A1 |
