(54) УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ЭЛЕКТРОМАГНИТНОЙ ПОСТОЯННОЙ ЯКОРНЫХ ЦЕПЕЙ ДВИГАТЕЛЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения электромагнитной постоянной времени якорной цепи электродвигателя | 1977 |
|
SU736278A1 |
| Устройство для определения электромагнитной постоянной времени якорных цепей двигателя | 1975 |
|
SU661513A1 |
| Способ определения электромагнитнной постоянной времени якорной цепи электродвигателя постоянного тока | 1975 |
|
SU608232A1 |
| Способ ограничения динамических нагрузок механизма поворота экскаватора и устройство для его реализации | 1990 |
|
SU1781393A1 |
| Устройство для управления электроприводом транспортного средства с тяговыми двигателями, преимущественно независимого возбуждения | 1990 |
|
SU1766726A1 |
| Электропривод постоянного тока | 1984 |
|
SU1228208A2 |
| Электропривод постоянного тока | 1983 |
|
SU1115188A1 |
| Устройство для управления электроприводом поворота одноковшового экскаватора | 1980 |
|
SU907178A1 |
| Частотно-управляемый электропривод | 1988 |
|
SU1527701A1 |
| Электропривод постоянного тока шахтной подъемной установки | 1988 |
|
SU1654208A1 |
I
Изобретение относится к измерительной технике, и может быть использовано при наладке систем регулирования.
По основному авт.св. № 661513 известно устройство, содержащее масштабный блок, сумматор-интегратор, соединенный с входом измерительного прибора, два релейных блока, два источника опорного напряжения, переключатели, резисторы и два последовательно соединенных ключа, управляющие входы ключей соединены с выходами первого и второго релейных блоков, входы которых через одни соответствующие резисторы соединены с входом устройства, а через последовательно соединенные переключатели и другие резисторы - к соответствующим источникам опорного напряжения. Это ус ойство требует увеличенных по сравнению с предлагаемым затрат времени на измерение, так как определение электромагнитной постоянной времени якорной цепи двигателя возможно только после осуществления калибровки.
Откалибровать устройство - зто значит добиться равенства в установившемся режиме
и-1Р-Е 0,
(О , где и - напряжение, подаваемое на якорь
двнгателя;
Е - ЭДС тахогенератора; IR - падение напряжения на активном сопротивлении якоря двигателя, и произвести масштабирование сигналов, т.е. выставить каждый из шгналов выражения (1) с.соответствующим весом.
10
Так как имеется одаю управление, а три неизвестны, то зт.о можно осуществить только методом проб, что увеличивает затраты времени на определение Т. Причем правильность определения масштабов устанавлива1 тся при
IS интегрировании ниспадающей ветви динамического тока: при правильно произведенном масштабировании показания интегратора при интегрировании сигнала на восходящем н. нисходящем участках динамического тока
20 должно равняться нулю. Это значит, что при интегрировании сигналов при возрастании динамического тока величииа проинтегриро- ванного напряжения имеет один знак, а .
спаде динамического тока величина напрязкения имеет противоположный знак.
Следовательно, только равенство нулю напряжения на выходе интегратора свидетельствует о том, что масштабы выбраны правильно. В противном случае (напряжение на выходе интегратора не равно нулю), требуется изменить вес каждого из сигналов, что требует дополнительных затрат времени {.
Таким образом, в данном устройстве постоянная времени измеряется за некоторое Количество пускоэ двигателя, что увеличивает время измерения..
Цель изобретения - сокращение времени измерения.
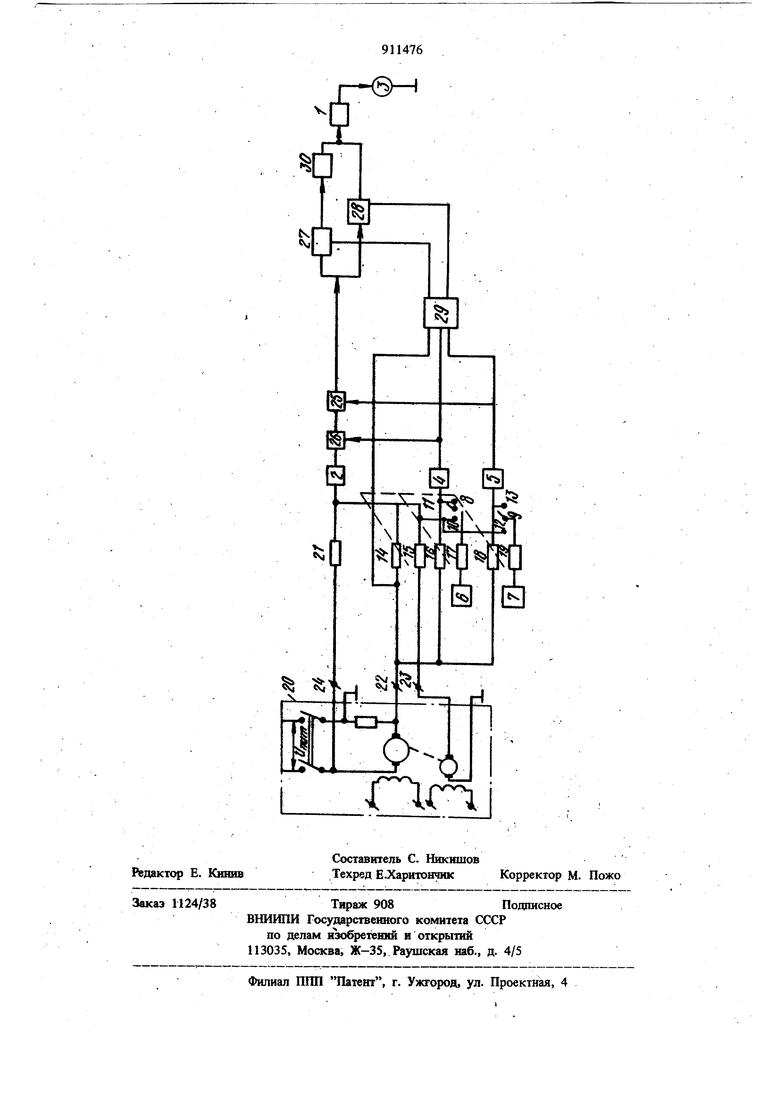
Поставленная цель достигается тем, что в устройство введены дополнительно логический блок, инвертор, третий и четвертый ключи, причем выход второго ключа подсоединен к сумматору-интегратору через две параллельно соединенные цепочки, одна из которых содержит третий ключ, а другая - последовательно соединенные четвертый ключ и инвертор, управляющие входы ключей подсоединены к соответствующим выходам логического блока, первый вход которого подключен к выходу .первого релейного блока, второй вход - к выходу второго релейного блока, а третий - к соответствующему входу устройства, На чертеже представлена блок-схема устрстства.
Устройство содержит сумматор-интегратор 1, масштабный блок 2, измерительный прибор 3, два релейных блока 4 и 5, два истоФ ника 6 и 7 опорного напряжения, переключаTejffl 8 и 9, клеммы 10, И, 12 и 13 переключателей, резисторы 14-19, объект 20, резистор 21, входы 22, 23 и 24 устройства, ключи 25, 26, 27 и 28, логический блок 29 и инвертор 30.
Устройство работает следующим образом.
Вначале устанавливаются коэффициенты передачи масштабного блока 2 по входам 24, 22 и 23. При этом объект 20 работает на установившейся скорости. Сумматор-интегратор 1 работает в режиме суммирования, а переключатели 8 и 9 переводятся в положения клемм соответственно 10 и 12. При этом ключ 25 замкнут, и на сумматор-интегратор 1 подается напряжение. Для того чтобы показания прибора 3 в абсолютных единицах определяли Т цепи якоря двигателя, производят масштабирование сигналов, поступающих на входы 24, 22 и 23 у4тройства.
Масштабирование сигнала, поступающего на вход 24, осуществляется изменением коэффициента передачи блока 2 до тех пор, пока стрелка измерительного прибора 3 не отклонится на всю шкалу. Подачей сигналов на входы 22 и 23 устройства устанавливают стрелку прибора 3 в нулевое положение (сигналы, подаваемые на входы 22 и 23, имеют
знаки, противоположные сигналу, подаваемому на вход 24).
После масштабирования сигнала, поступающего на вход 24, выставляют коэффициент передачи по входу 23 устройства. Для этого
на вход блока 2 подают сигнал с выхода объекта 20 и выставляют коэффициент передачи блока 2 по входу 23. В зависимости от типа двигателя этот сигнал должен состав;лять 0,8-0,99. Следовательно, если принять
шкалу иэмерительного прибора 3 за 100 де- . лений, то после подачи на блок 2 двух сигналов с входов 24 и 23 прибор 3 должен показать от одного до двадцати делений. После Этого выставляют коэффициент передачи блока 2 по входу 22. Изменением коэффициента передачи блока 2 (изменением сопротивления резистора 14) добиваются нулевого показания измерительного прибора 3. Так как точно неизвестно соотношение между
сигналами IR и Б, то калибровка устанавливает только их приблизительное соотношение.
Затем выбирают начало рабочего участка по величине сигнала IR, приходящего на вход 22 с объекта 20. В установившемся режиме определяется ток холостого хода сигнала IR, выраженный в делениях измерительного прибора 3. Так как начальный участок измерения Tj определяется рабочим током двигателя, то можно, исходя из пропорциональности между сигналом холостого хода IR и показаниями прибора 3, определить начало рабочего участка.
Для удобства калибровки целесообразно принять, что между резисторами 14, 16 и 18 соблюдается равенство(RM Rie RIB)Если, например, начало рабочего учасжа соответствует десятикратному значению холостого хода, то, изменяя, напряжение задания начала (). следует отклонить стрелку прибора 3 на число делений, в десять раз превышающее число делений от сигнала IR холостого хода. Аналогичный результат можно получить, если напряжение задания и.ц оставить неизменным, а изменять величину сопрвтивления резистора 17.
Конец рабочего участка сяределяется по той же методике, что и начало рабочего участка. При этом конец рабочего участка определяется величиной напряжения задания конца . или величиной сопротивления резистора 19.
После вьшолнения этих операций устройство откапибровано и готово к работе.
При работе устройства оатределяется Тэ якорной цепи на том участке, который был задан при калибровке устройства. В этом режиме переключатели 8 и 9 переводятся в положения клемм 11 и 13 соответственно Для определения Тд объекта 20 на вход двигателя подают растущее по произвольному закону до установившегося значения напряжение этом установившееся значение напряжения Uf, должно равняться напряжению, подаваемому на двигатель в режиме калибровки. После подачи напряжения ипиг на объект 20 выходные сигналъ .с добавочного сопротивления якорной цепи с тахогенератора возрастают, и, когда сигнал с добавочного сопротивления достигнет вели чины напряжения задания начала Uij ц рабочего участка, на выходе блока 4 появляется сигнал, от которого срабатьшает ключ 26. Одновременно зтот же сигнал поступает на вход логического блока 29. На выходе этого блока появится сигнал, поступающий на управляющий вход ключа 28, который открывает зтот ключ, и сумматор-интегратор 1 начинает интегрировать напряжение с эыхода блока 2. При дальнейшем росте сигнала с объекта 20 величина его достигает значения напряжения задания конца Uj рабочего участка, И на выходе блока 5 появляется сигнал, от которого срабатывает ключ 2S. Одновременно этот же сигнал поступает на вход логического блока 29, выходной сигнал которого заставляет срабатывать ключ 27 и отключает вход сумматора-интегратора 1 от блока 2.; Таким образом, при появлении на входе логического блока 29 сигналов с выхода объекта 20 (вход 22) и с релейного блока 4 логический блок 29 срабатывает и открывает ключ 28, а при появлении сигналов по трем входам логический блок 29 закрывает ключ 28. Когда динамический ток, достигнув максимума, начинает падатъ, наблюдается следую щая картина. При досппкешт величины задания конца рабочего участка Uj на вы66ходе блока 5 появляется сигнал, от которого срабатывает ключ 25. Одновременно с выхода блока 5 подается сигнал на вход логического блока 29, который срабатывает н открывает ключ 27. При спаде динамнческого тока сумматор-ннтегратор 1 получает питание от блока 2 через инвертор 30. Таким образом, логика работы блока 29 следующая: при росте динамического тока, о чем свидетельствует порядок работы ре,лейнь(х блоков 4 и 5 (блок 4 срабатывает .первым), сумматор-интегратор 1 получает питание от блока 2 непосредственно, а при спаде динамического тока, о чем свидетельсгвует порядок работы релейных блоков 4 и 5 (блок 5 срабатьюает первым), сумматор-интегратор 1 получает питание от блока 2 через инвертор 30. Это позволит сократить время анализа. Формула изобретения Устройство для определения электромагнитной постоянной времени якорных цепей двигателя по авт.св. N 661513, о т л и ч а ;jo щ е е с я тем, что, с целью сокращения времени измерения, в устройство введены .логический блок, инвертор, третий и четвертый ключи, причем выход второго ключа подсоединен к сумматору-интегратору через Две параллельно соещшенные цепочки, одна из которых содержит третий ключ, а другая последовательно соединенные четвертый ключ и инвертор, управляющие входы ключей подсоединены к соответствующим выходам логического блока, первый вход которого подключен к выходу первого релейного блока, второй вход - к выходу второго релейного блока, а третий вход - к соответствующему входу устройства. Источники информащш, принятые во внимание при экспертизе 1. Авторское свидетельство СССР N 661513, кл. G 05 В 23/02, 1979 (прототип).
