1
Изобретение относится к области механнзапии и автоматизации операций по подъему и спуску судов.
Известны устройства для вертикального подъема и спуска судов, содержащие короткоходовые гидродомкраты с датчиками нагрузки, подъемные траверсы, опорные штанги, траверсные и рамные стопорные устройства, платформы и гидросистему привода с механизмом задания расхода рабочей жидкости.
Однако известные устройства не всегда обеспечивают синхронную ра-боту гидродомкратов, что снижает эффективность применения таких устройст(В.
Цель изобретения - оптимизация процессов подъема и спуска судов.
Это достигается тем, что устройство снабжено функциональным блоком реверса и счета имлульсов рассинхронизации, подключенными со стороны входа через усилительпреобразователь к датчику нагрузки, например м-агнитоупругому, а со стороны выхода - к исполнительному механизму задания расхода рабочей жидкости в системе гидродомкрата.
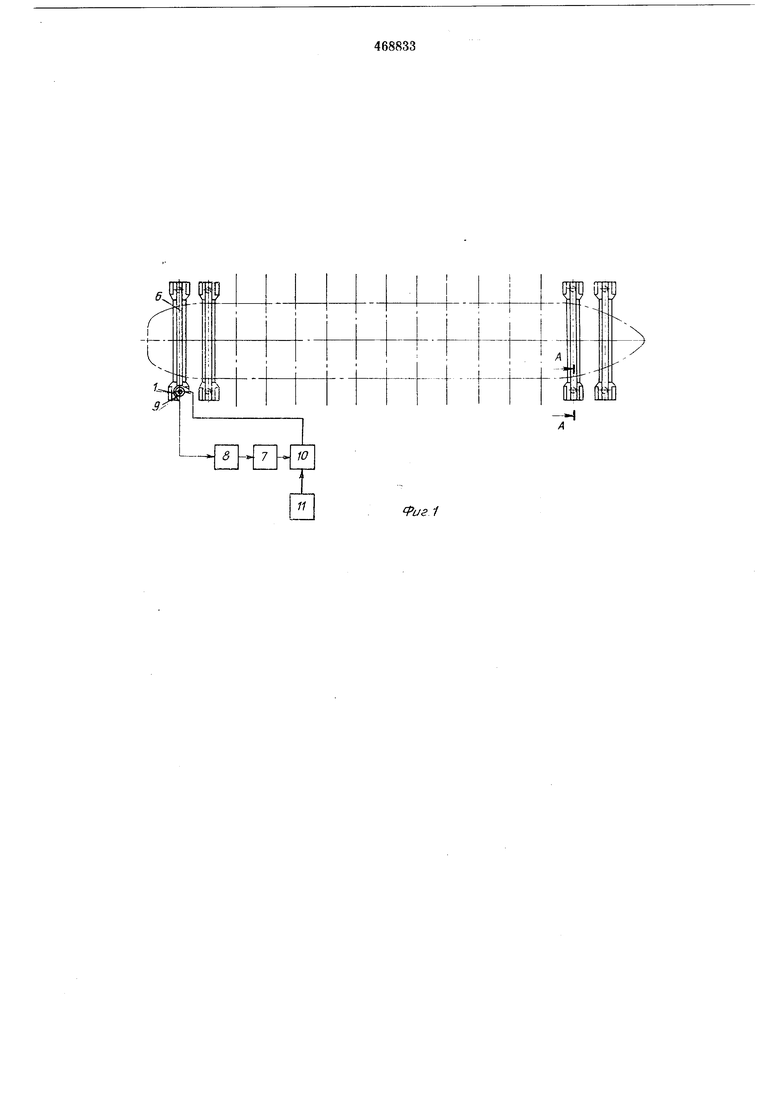
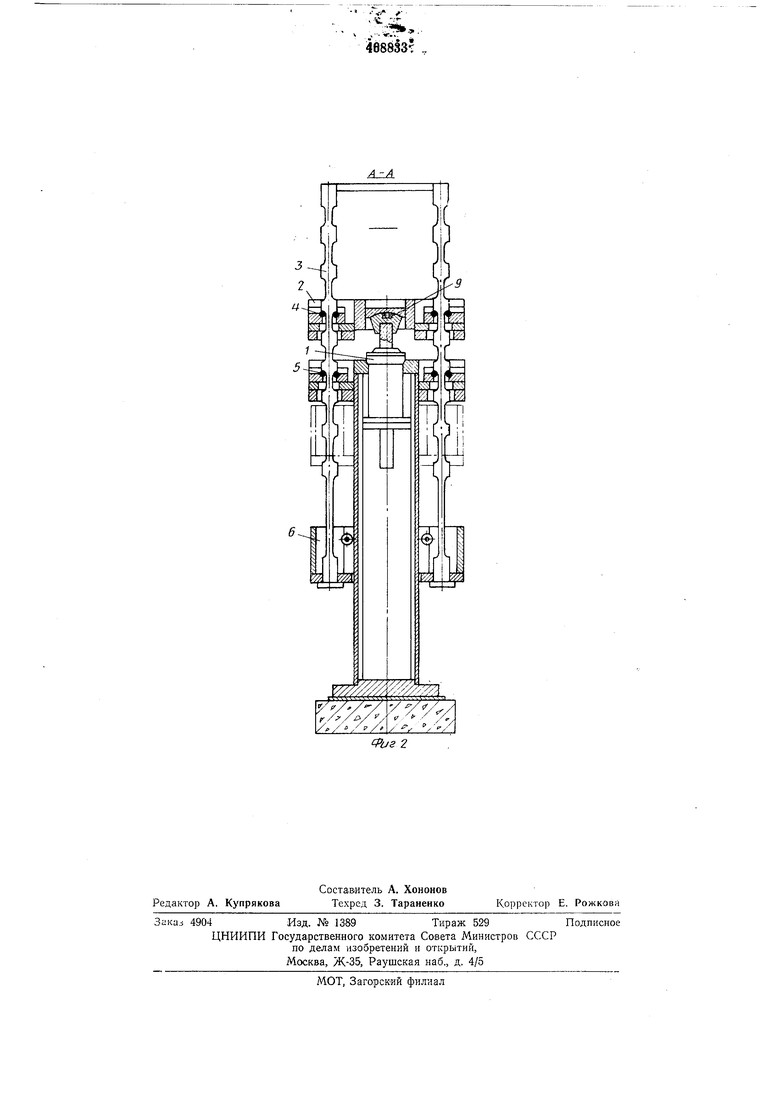
На фиг. 1 схематически изображено в плане устройство для вертикального подъема и спуска судов с блок-схемой синхронизации хода гидродомкрата; на фиг. 2 - продольный разрез по А-А на фиг. 1.
Каждый коротходовой гидродомкрат 1 связан одновременно с двумя проходящими через подъемную траверсу 2 опорными штангами 3. Последние входят в зацепление с
подъемной траверсой 2 посредством траверспых стопорных устройств 4, а также связаны с рамными стопорными устройствами 5 и платформами 6.
Функциональный блок 7 реверса и счета
импульсов рассинхронизации подключен со стороны входа через усилитель-преобразователь 8 к датчику 9 нагрузки, например магнитоупорному, уАановленному па сферической части штока гидродомкрата 1, а со стороны
входа - к исполнительному механизму 10 задания расхода рабочей жидкости в системе гидропривода 11.
Предлагаемое устройство работает следующим образом.
Перед началом подъема судна подъемные траверсы 2 устанавливают в нижнее положение, а траверсные стопорные устройства 4 вводят в зацепление с опорны.ми штангами 3. При подаче рабочей жидкости под давлением в полость гидродомкрата 1, соответствующему подъему судна, шток гидродомкрата 1 поднимает траверсу 2, а траверсные стопорные устройства 4, упираясь в зубья опорных штанг 3, поднимают их и вместе с ними судно
на высоту, равную величине хода поршня
короткоходового гидродомкрата 1, причем в начале подъема судна а.втоматически разводятся рамные стопорные устройства 5.
При синхронном ходе всех гидродомкратов 1 на подъем датчик 9 нагрузки каждого гидродомкрата 1 выдает электрический сигнал, пропорциональный приложенному усилию, который на выходе усилителя-преобразователя 8 станет равным нулю, в результате чего блок 7 реверса и счета импульсов рассинхронизации не выдаст управляющего сигнала на исполнительный механизм 10 задания расхода рабочей жидкости.
Таким образом, при синхронном ходе гидродомкратов параметры гидросистемы привода не изменятся.
В случае несинхронного хода (отставания) какого-либо гидродомкрата 1 практически усилие, развиваемое последним, будет равно нулю, и соответственно на выходе датчика 9 нагрузки сигнал также будет равен нулю, вследствие чего усилитель-преобразователь через дистанционно-управляемое реле реверса подаст управляющий сигнал на исполнительный механизм 10 задания расхода рабочей жидкости, в результате срабатывания которого увеличится подача рабочей жидкости в соответствующую полость гидродомкрата -, вводя его таким образом в синхронное действие с другими параллельно работающими гидродомкратами При достижении гидродомкратом 1 синхронного хода, исполнительный механизм 11 автоматически устанавливается в положение нормальной подачи рабочей жидкости.
Одновременно с подачей унравляющего сигнала на исполнительный механизм 10 задания расхода рабочей жидкости, сигнал рассинхранизации поступает, па реле счета импульсов блока 7, которое запоминает порядковый номер импульса рассинхронизации.
При повтор-ном выходе того же гидродомкрата 1 из синхронизма, носледний будет снова введен в синхронизм, при этом реле счета импульсов блока 7 запомнит следующий по счету импульс рассинхронизации.
Блок 7 реверса и счетчика импульсов рассинхронизации настраиваемся на запоминание двух импульсов рассинхропизации, и при поступлении третьего по счету импульса срабатывает реле реверса, которое включает исполнительный механизм 10 на увеличенную подачу рабочей жидкости в соответствующую полость гидродо.мкрата 1 на весь период подъема судна, обеспечивая таким образом устойчивость синхронного хода гидродомкрата 1.
Если в течение заданного времени на блок 7 реверса и счета имнульсов рассинхронизации, сохранившего в своей памяти зарегистрированные импульсы рассинхронизации в течение определенного Бремени, не поступит очередной импульс рассинхронизации, то происходит сброс предыдущих импульсов или
имнульса, зарегистрированных в памяти реле счета импульсов блока 7.
Дальнейщий отсчет импульсов начинается сначала, с первого ностуг|ивп1сго на его гзход имнульса.
Спуск судна также осуществляется циклически, причем один цикл равен величине хода поршня гидродомкрата 1.
При спуске судна и синхронном ходе всех
гидродомкратов 1, сигнал на выходе блока 7 реверса имнульсов рассипхропизации будет равен нулю, в результате чего исполнительный механизм 10 задания расхода рабочей жидкости, установленный в положение номинальной подачи, не будет испытывать управляющего воздействия со стороны блока 7.
В случае несинхронного хода гидродомкрата 1, управляющИЙ сигнал с выхода усилителя-преобразователя 8 через дистанционно-управляемое реле реверса блока 7 подается на исполнительный механизм 10, в результате срабатывания которого уменьшится подача рабочей жидкости в соответствующую полость гидродомкрата 1, вводя его таким образом в
синхронное действие с другими параллельно работающнми гидродомйратами 1.
При достижении гидродомкратом 1 синхронного хода исполнительный механизм 10 устанавливается в положение нормальной подачи рабочей жидкости.
При спуске судна блок 7 реверса и счета импульсов рассинхронизации работает также, как и при подъеме судна, но при поступлении третьего по счету и-мпульса рассинхронизации
исполнительный механизм 11 включается на уменьшение подачи рабочей жидкости в соответствующую полость гидродомкрата 1 на весь период спуска судна, обеспечивая таким образом устойчивость синхронного хода гидродомкрата 1.
Так как подъем и онуск судна происходят циклически, то между рабочими циклами осуществляется холостые хода подъемных траверс 2, в течение которых предусматривается
автоматическое отключение блока 7 реверса и счета имнульсов рассинхронизации.
Предмет изобретения
Устройство для вертикального подъема и спуска судов, содержащее короткоходовые гидродо.мкраты с датчиками нагрузки, подъемные траверсы, опорные штанги, траверсные и paiMHbie стопорные устройства, платформы и
гидросистему привода с механизмом задания расхода рабочей жидкости, отличающееся тем, что, с целью оптимизации процессов подъе.ма и спуска судов, оно снабжено функциональным блоком реверса и счета импульсов рассинхронизации, подключенными со стороны входа через усилитель-преобразователь к датчику нагрузки, например магнитоупорному, а со стороны выхода - к исполнительному механизму задания расхода рабоей жидкости в системе гидропривода.
..1.
| название | год | авторы | номер документа |
|---|---|---|---|
| Подъемный механизм вертикального судоподъемника | 1977 |
|
SU679478A1 |
| Подъемный механизм вертикального судоподъемника | 1979 |
|
SU872636A1 |
| Подъемник для подачи блоков судов в сухой док | 1979 |
|
SU775220A1 |
| Подъемный механизм вертикального судоподъемника | 1988 |
|
SU1523471A1 |
| Устройство для подъема затонувших объектов | 1982 |
|
SU1066890A1 |
| Устройство для спуска и подъема людей и грузов с судна на судно в море | 1976 |
|
SU660889A1 |
| Источник сейсмических волн и гидромеханизм для подъема и опускания излучателя | 1990 |
|
SU1793401A1 |
| Тележка для передачи груза с одного судна на другое в условиях открытого моря | 1975 |
|
SU564212A1 |
| СПОСОБ ПОДЪЕМА ЗАТОНУВШЕГО ОБЪЕКТА | 2008 |
|
RU2363613C1 |
| СПОСОБ УСТАНОВКИ ОПОРНОГО БЛОКА ГИДРОТЕХНИЧЕСКОГО СООРУЖЕНИЯ НА МОРСКОЕ ДНО | 2008 |
|
RU2371543C1 |
-1
t
Q - 7 - 10
, J
;.
