Изобретение относится к области строительно-монтажных работ и может быть исполь.зовано преимущественно для строительных элементов, монтируемых под водой.
Известны грузоподъемные устройства для монтажа строительных элементов, монтируемых под водой, содержащие грузозахватный орган, на котором смонтирована поворотная опора с многозвенным рычажным манипулятором, снабженным телекамерой.
Недостатки этих устройств заключаются в том, что рычаги манипулятора требуется предварительно приводить в рабочее положение, а при обходе грузового подвеса - частично складывать, что значительно ухудшает маневренность манипулятора с телекамерой и снижает производительность устройства.
Для повышения маневренности манипулятора с телекамерой в предлагаемом устройстве на поворотной опоре копсольно закреплена дугообразная балка, на свободном конце которой смонтирован с возможностью поворота манипулятор с телекамерой.
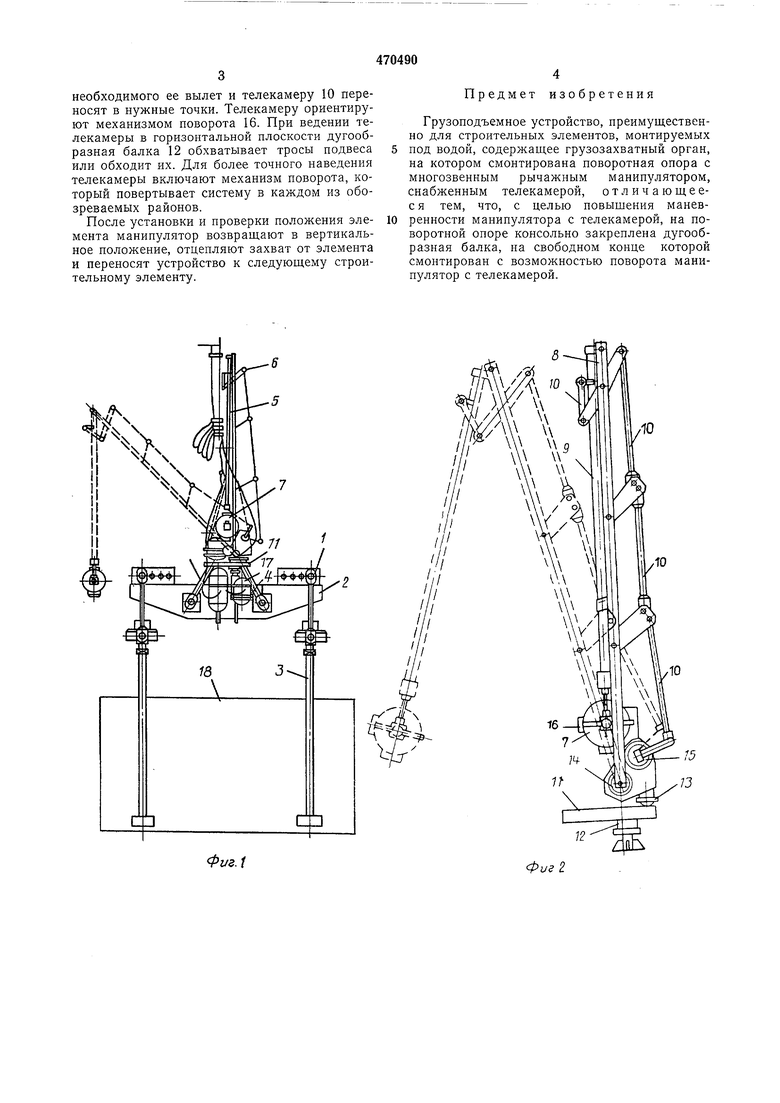
На фиг. 1 показано описываемое устройство, общий вид; на фиг. 2 - манипулятор с телекамерой, вид сбоку; на фиг. 3 - то же, вид спереди; на фиг. 4 - разрез по А-А на фиг. 3.
Устройство представляет собой автоматический или полуавтоматический грузозахватный орган 1, состоящий из несущей балки 2 и захватных органов 3, подвещиваемый грузовым подвесом 4 к крюку крана 5 и соединенный с манипулятором 6. Манипулятор 6 содержит основной рычаг 7, конечный рычаг 8, звенья
управления 9. На конечном рычаге 8 помещена телекамера 10.
Поворотная опора 11 установлена на оси симметрии грузозахвата 1. К поворотной платформе 11 прикреплена дугообразная балка 12,
на консольном конце которой установлен механизм вращения 13 рычажной системы манипулятора. В местах соединения рычагов помещены механизм наклона 14 основного рычага 7, механизм наклона 15 конечного рычага 8,
механизм поворота 16 телекамеры 10.
Питание механизмов осуществляется от приводной станции 17.
Устройство работает следующим образом. Монтируемый элемент 18 грузозахватом,
подвешенным на крюк крана 5, переносят к месту установки. Крановщик, включая телекамеру 10 и механизм вращения 13 манипулятора 6, по видеоконтрольному устройству опреляет дальнейшее необходимое направление
движения элемента 18. После установки элемента проверяют соответствие его положения проектному, для чего механизмом наклона основного рычага 7 и механизмом наклона 15 конечного рычага 8 выводят рычажную систему из вертикального положения, изменяют до
необходимого ее вылет и телекамеру 10 переносят в нужные точки. Телекамеру ориентируют механизмом поворота 16. При ведении телекамеры в горизонтальной плоскости дугообразная балка 12 обхватывает тросы подвеса или обходит их. Для более точного наведения телекамеры включают механизм поворота, который повертывает систему в каждом из обозреваемых районов.
После установки и проверки положения элемента манипулятор возвращают в вертикальное положение, отцепляют захват от элемента и переносят устройство к следующему строительному элементу.
Предмет изобретения
Грузоподъемное устройство, преимущественно для строительных элементов, монтируемых под водой, содержащее грузозахватный орган, на котором смонтирована поворотная опора с многозвенным рычажным манипулятором, снабженным телекамерой, отличающееся тем, что, с целью повыщения маневренности манипулятора с телекамерой, на поворотной опоре консольно закреплена дугооб разная балка, на свободном конце которой смонтирован с возможностью поворота манипулятор с телекамерой.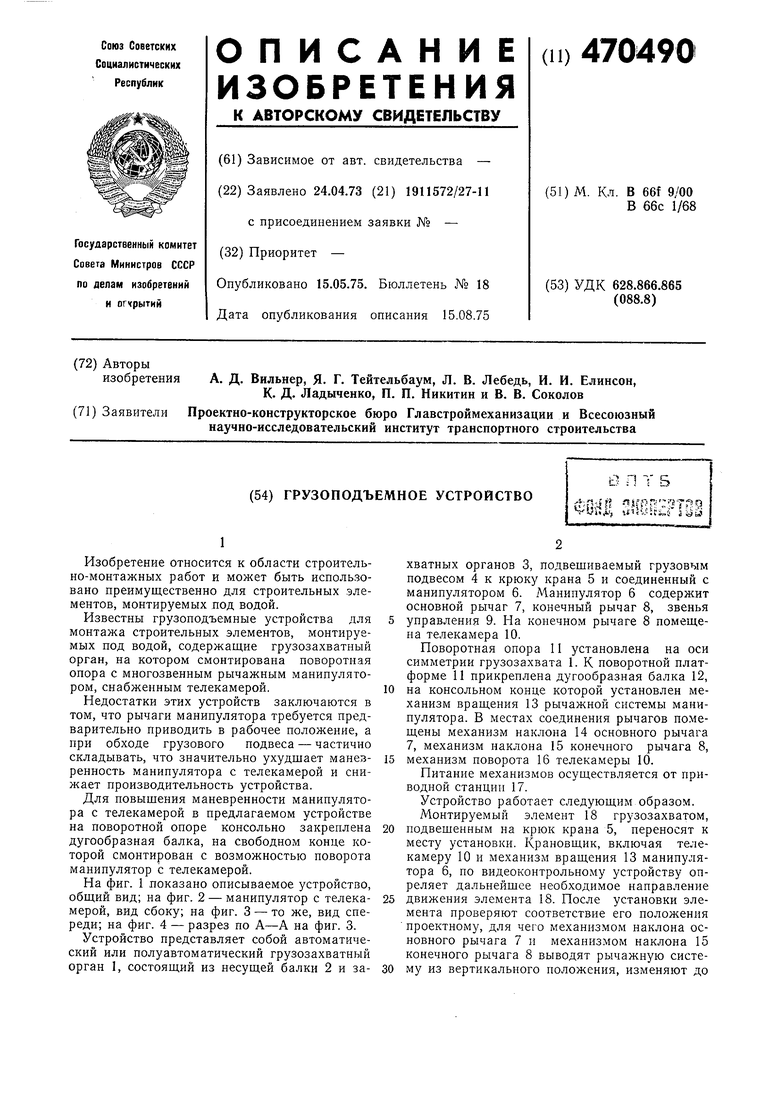
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАВЕРСА ГОРИЗОНТАЛЬНОЙ СТЫКОВКИ, БЛОК ЗАДАНИЯ НАГРУЗКИ МЕХАНИЗМА БАЛАНСИРОВКИ ТРАВЕРСЫ, БЛОК КОМПЕНСАЦИИ ВЕКТОРА НАГРУЗКИ МЕХАНИЗМА БАЛАНСИРОВКИ ТРАВЕРСЫ, СПОСОБ НАСТРОЙКИ БАЛАНСИРОВКИ ТРАВЕРСЫ | 2008 |
|
RU2374164C1 |
| КРАН-МАНИПУЛЯТОР | 2005 |
|
RU2312057C2 |
| КРАН-МАНИПУЛЯТОР | 2004 |
|
RU2274559C1 |
| КРАН-МАНИПУЛЯТОР МЕТАЛЛОВОЗНЫЙ | 1998 |
|
RU2140367C1 |
| Монтажный подвес | 1977 |
|
SU660915A1 |
| СТЫКОВОЧНЫЙ АГРЕГАТ | 2007 |
|
RU2341447C1 |
| Устройство для монтажа контактной сети электрифицированных железных дорог | 1988 |
|
SU1594009A1 |
| ИНЖЕНЕРНАЯ ГУСЕНИЧНАЯ МАШИНА НА БАЗОВОМ ТАНКОВОМ ШАССИ | 2004 |
|
RU2283467C1 |
| КРАН-МАНИПУЛЯТОР | 2004 |
|
RU2263589C1 |
| Грузозахватное устройство | 1991 |
|
SU1798288A1 |
ФvгЛ
Фиг 2
- - I ,
72
401
