Изобретение относится к ме.ханизации выдачи штучных грузо.в « может быть примене«о, в частности, в поточно-автоматичеоклх Линия.х изготовления реЗИновы.х смесей для ноштуч.ной выгрузки И иодачи брИкетирозаниь Х «аучуков, наЛрьчмор, из мифичных лолдонов со съем.ны.ми двумя бо.кавы.м.и стенками и /крышкой.
Известны па.кеторазборные машины для штучных грузов, содержащие раму И хмонгиразанные на :ней приемное устройство, 1:1одъсм«о-опускную ирлводную платформу, подвижно установленную в вертикальны.х паправляшидил рамы, сталк«ваюш;11й ме.ханизм и выдаюш,И11 конвейер.
Однако такие машины не обеспечивают разборку грузов из пакетов 1послойно, порядно и поштучно, что с {ижает про изводительность п универсальность такого тииа машлгн.
Целью изобретения является обеспечение возможностИ разборки тшкетол пз штучны.х грузов послойно, порядно, поштучно и так далее.
Это достигается тем, что сталкивающ ий мехавиЗМ выполнен в виде многорядного пеппого конвейера, ведундие звездоч1К и :которого подвижно посажены на обгвдш п пр 13одной Вал и снабжены индивидуальными мусртамп включенья. На цепях жестко закреплены упоры, ;взаимоде1 ствуюп11ие с разоираемыми грузa и.
С полью синхронизации олераний нодачп очередного -пакета на нлатформу п выдачи порожнего .поддона из мапшны, последняя может быть снабжена двухрядным непри.водным ролыанго.м с .вляюпш1мп, межд рядами которого смонтирован одпоряд П)1и цел.ной конвейер, несущий на цепях л ссткр за.крепленпые упоры, последовательно взаимодействуюш.;:е с пакетом п порожнПм поддоном.
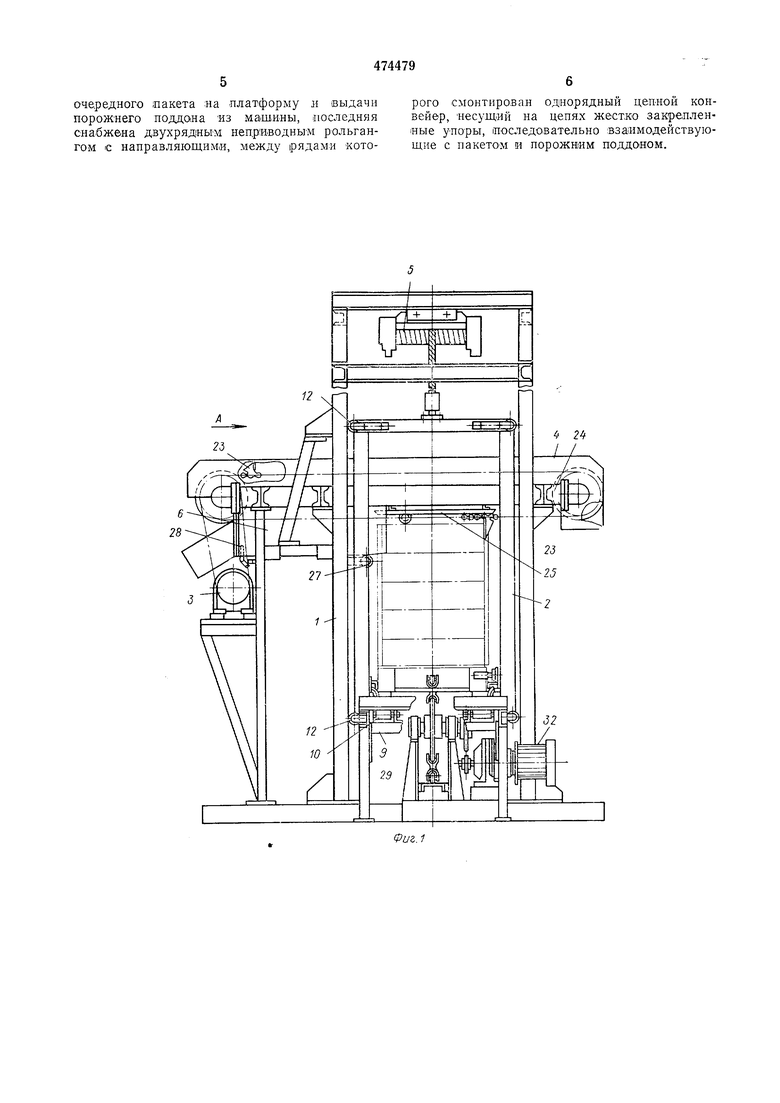
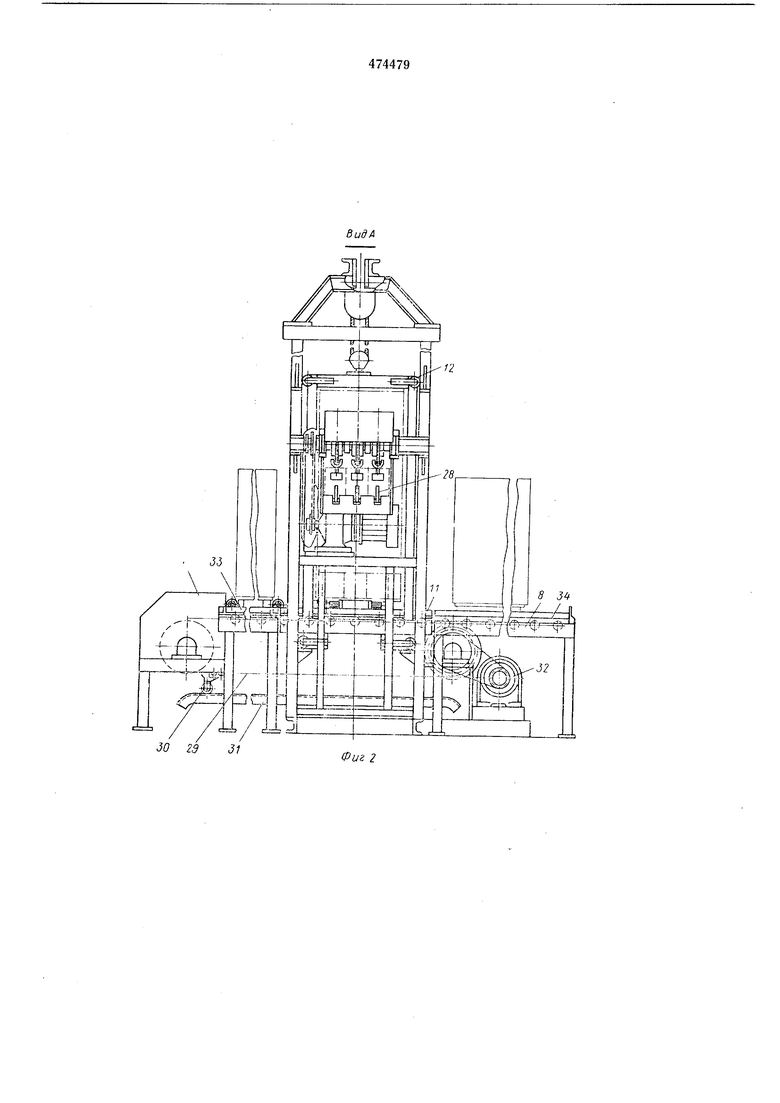
На фиг. 1 ;1оклзана предлагаемая машина, общий на . 2 - вид по стрелке
5 А на фпг. 1; на фиг. 3 - сталкивающий механизм маш-ины.
На раме /, в вертикальных на:1ра1вля;оии1х которой подвижно устаиовлепа иодъемно-oinyскная приводная платформа 2, укрсп.шиы при0вод 5 для передачи дв ижения тяговым цопнм сталк в; ЮИ1его механизма 4. электроталь 5. для осущестз.мения движения платформы 2 ;i желоб 6.
Подающий .кошсПер 7 предназначен для
5 станозли п подачи пакетов с грузамп на ; латфсрм}. а отборочный конвейер 8 - ;i.-; приема пэрожнпх пакетов (поддонов) из подъемпо-оп ск1П) платформы.
На ппжпол: основаппп платформы 2 в рам0ке 9 установлены роликп 10, образующие двухрядный рольганг, но Которому нсрсмсндается тш.кет (поддОН).
Над ролпкамн к рамка.м прнкренлены ограничнтслн 11, обеснечивающис центрироваН:11с Пакета (поддона) со штучны:М грузом па Н11ж;псм основа-тин ткаатформы. На пижнем и верхнем осповаин.н платформы установлепы 12, -которыми .-платформа опираегся на стойки рамы / щря подъеме и спуске.
Сталкивающий механизм 4 для выдачи груза ИЗ (пакета (поддона) выполнен в в-иде многорядного цепного конвейера, у которого в сту п-1цах ведущих звсз,дочек 13 установ.чены -электромагнптные муфты 14.
Ведущие звездочки смонтироваиы на валах 15-17. Валы ооединены жесткими муфтами 18, образуя сборный вал, что лозволяет легко заменять детали :в узлах.
Валы 15-/7 смонтированы на шарикоподшипниках, расположенных в корпусах 19 и 20. На оси 21 у становлены Свободновращающиеся з-зездочк1И 22. На ведущие и ведомые звездочки надеты тяговые цепи 23 с упорам и. ВедуЩ1ИЙ .и ведомый валы 1смонт ированы на раме 24, в нижней 1частн которой за:К|реплены упориые направляющие 25, предотвращающие прогиб цепей iB начальный момент сдвига изделий из :Пакетов (поддонов).
Кроме направляющих в ниЖПей части рамы закреплен датчик 26, по сигналу которого осуществляется выключение -и вьиключение электрической тал-и И иодача людъемно-опускной плат-формы на шаг, равный (высоте груза.
Для Сдвига грузов лз пакета (Поддоиа) -и направленного перемещения верхнего ряда грузов желоб 6 выполнен, в виде короба, две боковых стенки которого в заходпой част1И отогнуты наружу, а дн-ище с роликом 27 отогнуто вниз. На выходной части через пазы в дннще внутрь желоба входят рычаги 28, которые ло.вор ачпваются перемещаемыми изделиям,и 1П сво1ИМИ задними кОНцамн воздействуют на путевые переключател.и, выдающие Оигпалы о ПрохождеиИИ изделий.
Подающий дчопвейер 7 для устаповкп и подачи иакетои (-поддонов) в людъемно-опускную нлатформу 2 выполнен в виде двухрядного ро.тпкового кон-вейера, между рядами ролнков которого «роходит замк нутая цель 29 с упорами, OHa6mennbiNtn ролп:Ками 30 для перемещения нижней ветв,и цепи сто аганравляющей 31. Упо-ры Пеш- 29, перемещающегося от привода 32, предназначены для взаимодействия с пакетами (поддонам,и), установлепными между параллельными ограничителями 33. Последн1ие предназначены для прямолинейности дв,ил ения паКетов (поцдонов) по ролИ1кам конвейера, последовательной установжи их под разгрузку в подъе.мио-апускную платформу, а -после апорожнения - выталк иван:пя «х на кОН(Вейер 8. Ограничители 34 со стороны платформы отогнуты наружу, что обеспечивает выталкивание паркета (иоддана) из платформы без заклиниваний.
ГЬрсдлагаемая п а кето разборная машина ра-ботает следующ им образом.
Перед установ:кой иакето-в (поддонов) на пакеторазбориую машину с них вручную снимается крышка л две бо,ковые стенки, после чего несколько упакетов (аюддо:нов) электропогрузчиками уСтаНавливаются между упорами цепи 29 на конвейер 7. При пуске машины включается электропривод 32 и Лакеты (поддоны) -перемещаются по ролпкам -к платфО|рме 2. Первый пакет (поддон) по наПравлению движения устанавливается в подъемно-ОПускной .платформе и электропривод 32 отключается.
После установки пакета (поддона) в п-одъемно-Опускную нлатформу осуществляется подъем его иа высоту, равную высоте груза, электрической талью 5, ;и п-о сигналу датчика 26 электрическая таль отключается. Затем включается электропр,ивод 3 и требуемое колзЕчество элект1ромагпитных муфт 14 звездочек 13, ПриВОдящпх в движение тяговые цепи. После этого упорами тяговых цепей 23 сталкивается и перемещается по желобу 6 необходимое количество штучных грузов.
При выходе штучных грузов из желоба рычаги 28 :новорачив-аются и задними концами воздействуют на путевые -переключатели, выдаюш ие сигналы на счетчи-ки, которые отключают электромагнитные муфты 14 после нужного количества штучных грузов. В момент сдвига верхнего Ряда нижний ПОД ним ряд грузов, сдвигаясь, упирается в ролик 27 и при подъеме -платформы 2 для сталкивания следующего ряда штугных грузов они прокатываются по роЛИ.ку |без защемлений.
После выталкпвания всех штучных грузов из пакета (поддона) он с платформой 2 опускается в 1нижнее положение и включается электропривод 32, который прпводит в движеК1ие тяговую Цепь 29 и осуществляется выталкивание 1юрожнего 1пакета (-поддона) -на конвейер 8, а На его место и.а плат4)орму 2 устана-вл1изается следующий -пакет (поддон).
П р е -д м е т из о б р е т е н и -я
. Пакеторазборная ма1шина для штучных грузов, содержаШая раму и смонтированные на ней .приемное устройство, иадъемно-опускн -ю пр-иводную платформу, иодвижно установленную в вертикал1)Ных паправляюшпх рамы, сталкивающий механизм и выдающий конвейер, отличающаяся тем, что, с целью обеспечения возможности разборки пакетов из штучных грузов послойно, иорядно, поштучно и так далее, сталкивающий механизм вьтолнеп в виде м-ногорядного .цепного конвейера, ведущие звездочк1и которого подвижно посажены на общий приводной вал и сна-бжены индп.видуальнымл1 муфтами включения, а -на целях .жестко закреплены упоры, взаимодействующие с разбираемыми rpyBaNW.
2. Устройство .по п. 1, отличающееся тем, что, с .целью синхронизации операций людачи
очередного пакета на платформу и выдачи порожнего поддана из машины, последняя снабжена двухрядным неприводныМ рольгангом с направляющими, между рядами -которого смонтирован однорядный цепной конвейер, несущий на цепях жестко закрепленные упоры, последовательно вза имодействующие с пакетом и порожн1им поддоном.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для разборки пакетов штучных грузов | 1975 |
|
SU590221A1 |
| Пакеторазборная машина для штучных грузов | 1985 |
|
SU1255533A1 |
| Пакеторазборная машина для штучных грузов | 1990 |
|
SU1761648A2 |
| Пакеторазборная машина для штучных грузов | 1990 |
|
SU1768480A1 |
| Пакеторазборная машина для штучных грузов | 1974 |
|
SU667469A1 |
| Машина для формирования пакета штуч-НыХ гРузОВ HA пОддОНЕ | 1978 |
|
SU816915A1 |
| Машина для разборки пакетовшТучНыХ гРузОВ | 1979 |
|
SU816916A1 |
| Пакетоформирующая машина для штучных грузов | 1984 |
|
SU1239065A1 |
| Машина для разработки пакетов штучных грузов | 1975 |
|
SU569503A1 |
| ПАКЕТОФОРМИРУЮЩАЯ МАШИНА | 1967 |
|
SU194000A1 |

13
2
2д
iO
