сигнальных ламп и т. п.) индицирует работу отдельных элементов системы автоматики пресса (электромагнитов, гидрозолотииков, электродвигателей и т. д.).
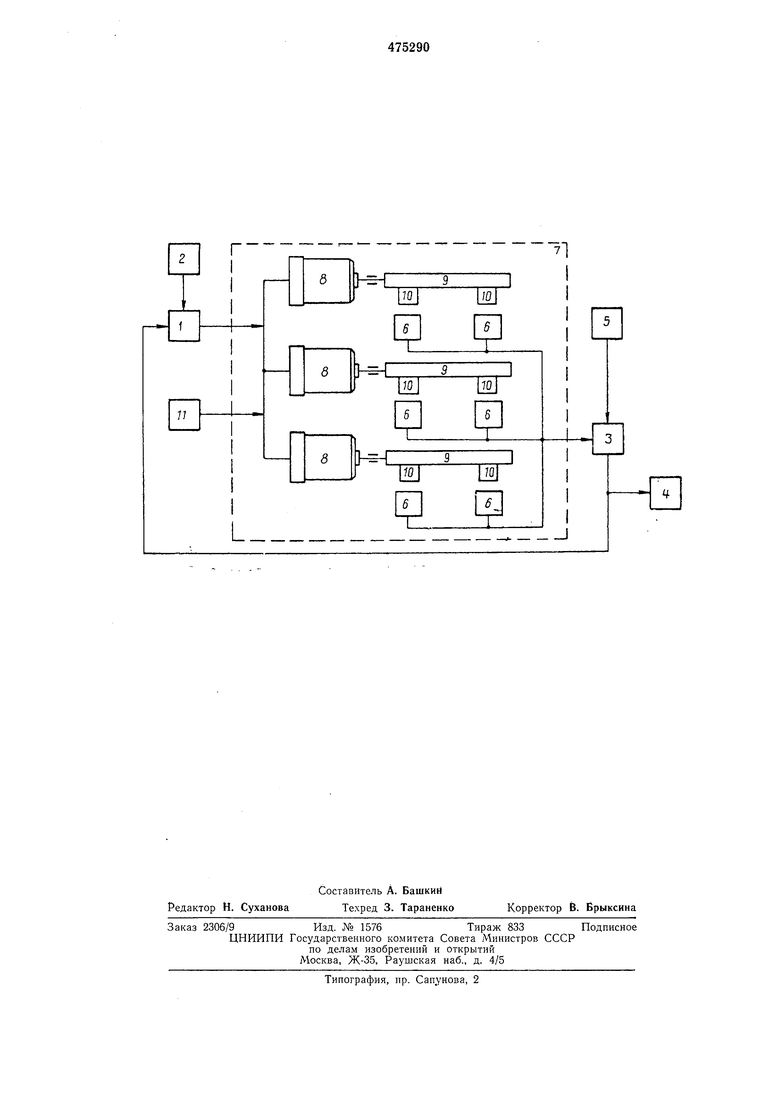
Входы системы 3 соединены с пультом 5 улравления и угловыми датчиками 6 циклового командоаппарата 7. Последний состоит нз набора реверсивных сервоприводов 8, вращающих валы 9, взаимодействующие с помощью флажков 10 с угловыми датчиками 6, моделирующими работу датчиков пути и давления пресса. Валы сервоприводов модулируют работу гидравлических цилиндров по возвратно-поступательным перемещениям рабочих органов пресса.
Сервоприводы 8 циклового командоаппарата 7 соединены с |блоком-преобразователем 1 и с блоком 11 имитации механических и гидравлических ломех. Последний представляет собой совокупность органов управления, предназначенных для отключения того или иного реверсивного сервопривода от блока-преобразователя 1 и включения соответствующего сервопривода для имитации помех движеиию подвижного механизма иресса.
Моделирующее устройство гидравлического пресса работает следующим образом.
Блок-преобразователь 1 сигналов ио программе программного задатчика 2 и сигналам системы 3 электроавтоматики пресса управляет вращением реверсивных приводов 8 циклового ко.мандоаппарата 7. Реверсивные приводы вращают валы 9 в последовательности перемещений подвижных органов пресса. При этом воздействие флажков 10 на угловые датчики 6 моделирует воздействие иодвижных органов пресса на расположенные на нем датчики пути и давления. Угловые датчики вырабатывают сигналы, поступающие в испытываемую систему электроавтоматики пресса. Вырабатываемые системой электроавтоматики сигналы поступают по обратиой связи на блок-преобразователь 1, который посылает новые командные сигиалы на серво-приводы
8 циклового командоаппарата 7. Состояние выходных сигналов системы 3 фиксируется на иидикациоином табло 4.
При необходимости ввести в систему испы5 тания аварийный режим или помеху, препятствующую движению подвижного мехаиизма пресса (т. е. моделирующему его сервоприводу), органы управления блока 11 имитации помех отключают соответствующие сервопри0 воды 8.
Наладка системы 3 в толчковых режимах осуществляется с пульта 5 управления органами уиравления.
Таким образом, ироисходит полное модели5 рование работы гидравлического пресса.
Предмет изобретения
1.Моделирующее устройство гидравличе0 ского пресса, содержащее цикловой командоаппарат, пульт управления, табло индикации и испытываемую систему электроавтоматики гидравлического пресса, отличающееся тем, что, с целью ускорения отладки и испытаний гидравлического пресса, а также обеспечения универсальности моделирующего устройства, оно снабжено |блоком-иреобразсвателем сигналов, моделирующим работу гидросистемы, программным задатчиком, задающим цикл работы пресса и блоком имитации гидравлических и механических помех, причем блок-нреобразователь своими входами соединен с ирограммным задатчиком и с выходами испытываемой системы электроавтоматики пресса, а выходами - с цикловым командоаппаратом,. с которым соединен также блок имитации гидравлических и механических помех.
2.Устройство по п. 1, отличающееся 0 тем, что цикловой командоаппарат выполнен
в виде реверсивных сервоприводов, моделирующих работу гидроцилиндров по возвратнопоступательному перемещению рабочих органов гидравлического иресса.
| название | год | авторы | номер документа |
|---|---|---|---|
| Моделирующее устройство гидравлического пресса | 1977 |
|
SU659409A2 |
| Моделирующее устройство гидравлического пресса | 1976 |
|
SU571393A2 |
| Система управления выбором инструментов со свободным кодированием | 1989 |
|
SU1675848A1 |
| Устройство для обучения и контроля совместной работы операторов | 1985 |
|
SU1345235A1 |
| Тренажер транспортного средства | 1987 |
|
SU1508265A1 |
| Устройство программного циклового управления позиционированием манипулятора бурильной установки | 1978 |
|
SU747997A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ТРАВЕРСЫ ГИДРАВЛИЧЕСКОГО ПРЕССА | 1992 |
|
RU2006370C1 |
| Электрогидравлическая следящая система | 1985 |
|
SU1317189A1 |
| Тренажер для водителей транспортных средств | 1983 |
|
SU1238135A1 |
| Устройство полунатурного моделирования системы управления беспилотным летательным аппаратом с радиолокационным визиром | 2015 |
|
RU2629709C2 |