(54) МОДЕЛИРУЮЩЕЕ УСТРОЙСТВО ГИДРАВЛИЧЕСКОГО ПРЕССА
| название | год | авторы | номер документа |
|---|---|---|---|
| Моделирующее устройство гидравлического пресса | 1974 |
|
SU475290A1 |
| Моделирующее устройство гидравлического пресса | 1977 |
|
SU659409A2 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ МНОГОПОЗИЦИОННЫМ ПРЕССОМ ДЛЯ ПРЕССОВАНИЯ ПОРОШКОВЫХ МАТЕРИАЛОВ | 2005 |
|
RU2294284C1 |
| Система управления гидравлическим двухползунным прессом | 1978 |
|
SU742163A1 |
| Стенд для испытания сдвоенного регулируемого насоса и гидроагрегата | 1983 |
|
SU1132056A1 |
| Система автоматического управления литьевой машины | 1983 |
|
SU1118539A1 |
| Система управления гидравлической кузнечно-прессовой машиной | 1982 |
|
SU1058796A1 |
| Система управления выбором инструментов со свободным кодированием | 1989 |
|
SU1675848A1 |
| Устройство программного циклового управления позиционированием манипулятора бурильной установки | 1978 |
|
SU747997A1 |
| Устройство управления гидравлическим прессом | 1977 |
|
SU644634A1 |
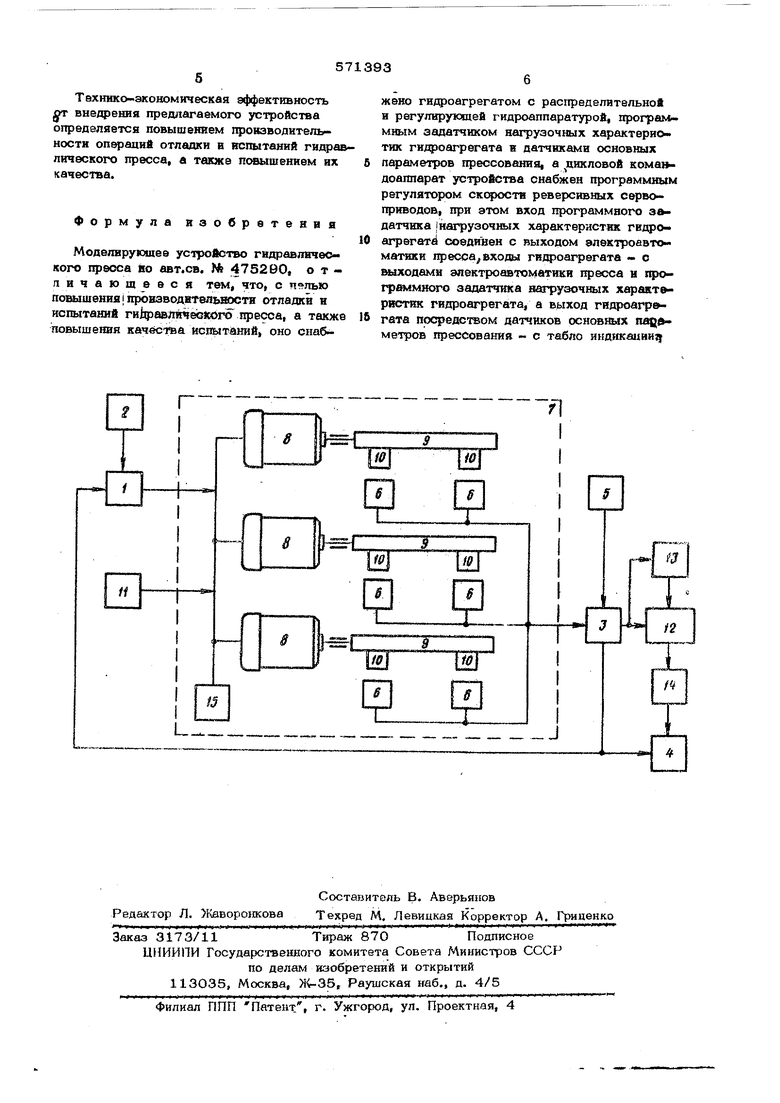
; Изобретение к ;аается метать лов давлением и относится в системам угфав леииа гидравлическими прессами, По основному авт.св. № 475290 извес- но моделирующее устройство гидравлического $ , содержащее цикловой командоаппарат, пульт ущэавледая, табло индикации, систему влектроавтоматики гидравлического пресса, :6пок- прво%1азоватепь сигналов, моделирух ;Щий работу гидросистекад, программный аа to датчик аадакшшй цикл работы цресса и блок И}|лмитааии гидравлических и механических помех.
Блок-преобразователь сигналов по npof.. грамме программш го задатчика и сигналам Г 16 системы электроавтоматики пресса управля ет врашеяием реверсивных приводов ииклового
, командоаппарата.
i Реверсивные приво1о 1 вращают балы в последовательности перемещений подвижШйх
органов пресса. При этом воадействие флаж ков иа угловые датчики моделирует в,,
,ствие подвижшах органов пресса на расположенные на нем датчики пути и давлениа..
:Угловые датчики вырабатывают сигналы, .i 25
поступа ошие в испытуемую систему электроавтоматики пр«и: а. Вырабатываемые системой электроавтоматики сигналы поступают по обратной свези на блок-щзеобразователь, который посыпает новые команд вые Сигналы на серво1фи&ош11 циклового командоаоп ата. Состояние кдходных сигналов системы 1 С1фуется на индикааио ном табло.
Данноеустройство голяетсн наиболее близким к изобретеш Ю по техтапеской суин кости и достигаемому результату.
Недсктатком его является то, что оно не позволяет осуществить исга 1та1а е гидроагрегата до установки его на 1фессе, что не обеспечсшает высокой производительности испытаний и отладки гидравтгческого пресса.
Целью настошнего изобретения является повышение производительности отладки и испытаний гидравлического пресса, а также повышение качества испытаний путем расширения фуикционалышх возможностей моделирующего устройства. датчиками ССНОВЕЫХ параметров прессов яяяз а овклооой командоаппарат устройсг . ва фсаграммиым регулятором ско роста рав ю1твых сервоприводов, это вход программного задатчнка нагрузочных х акт встгас ги/фоетт егата соединен с выходом еяектроавтоматвкн пресса, входы гидроагрегата - с выходами электроавтоматики Щ)всс& к 1фограммного эадатчвка лагрузо гшлх х акт жстшс гидроагрегата, а выход гщцюагрегата носредством датчи KOR ОС1ЮВНЫХ пар етров пресс№анив-с табло HSfUEtcaoBBo На чертеже изображена моделврующего устройсуеий тт&рее&яач&окого прео са. Моделирующее устроЛз-тео содержнть л преобразователь i,. ,одвпвм вэ соедини apcff e MHbitав датчик 2. Другой вход 6лок&41рвоС азователя сигналов соедиаен с выходом СБЕСт&мы электро томатшси 3 щ есх:а. ЕКыход системы алектроавтсшатйки 3 пресса соединен так же с табло гшшкаааи 4, а вхошл сшутемы 3-е пультом управлеЕШя 5 в жжыми датчвкамв 6 1шкп5 ого командоаппарата 7, которыд оостоят вэ набега р@ае|юиввых с БО рввовс« в« связанных с 9. Псюлеяш18 взашмодеЗствуют щэи помовш фяажЕОВ Юс угловыми aaiv. .чинами 6, модел1фу1СШ1М1 рлботу пресса, Сервоприводы 8 шосжжого комаздЕоап парата 7 соедаяеш. с &{оком- фео азсюв телам 1 в с 11 ш сьштаави мехавв ческихи гтровлгчеосшс помех. Система @лектроавтоматв8г 3 свошли ы ходамн соо дннена с гшдх Тзвгатом 12 и nporpoiifмвьЕм задвтчшсом 13 нагрузочш {Х характ истик гидроогршета, обеспеч1шаюшим нагружение магшУ1| аяей гидроагрегата в соответствш с задожеввой в зедатчик 1Ф гршлмой. НагрузоЧ Е ые характ истикв роагрегата 12 в процессе всш тания кови тропвруются датчиками 14 основных параметров преосовавия, соедннаиными с табло индикацни 4. ПрогрвЁМмиый рагулят( 15 скорости реверсивных сервоприводов 1феднааначен для моделирования работы гшфоцилинщюв воэвратво-поступательнснго перемещения рабочих органов пресса в фушшвн вр Мени. Моделирующее устройство гидравтсчес- кого пресса работает следующим образом. Блок-преобразователь 1 сигналов по 1фограмме программного задатчика 2 и сигналам систе ол 3 электроавтоматики пресса управляет вращением реверсивных сервоприводов 8 циклового командоаппар та 7. Реверсивные приводы вращают валы 9 в последовательности перемещений подвижных органов пресса. При этом воздействие флажков 1О на угловые датчики 6 моделирует воздействие подвижных органов прессь Указанная цель достигается тем,.что моделирующее устройство гидравлического пресса дшюлнвтельню снабжено гидроагрегатом с рас1федвлнтельиой и регул1фующей пцфоапя эатурой, прогрюямиым задатчиком нагрузочйых х« вктерветяк гидроагрегата, ва расволожакнйе на яем датчики, а про граммкый регулятс 15 скорости изменяет враве1шя с гаопрвводов m эаложеиэюй в него протрамме , что срабатывавие yrnoi x датчиков 6 про1ЮХОДВТ через nHTefmamii времени соответ ствуюоше вра««енв выполнешя каждой операции техшмкн ическсиО пшсла работы тфеоса. Угловые датчики 6 шдрабатывают скгналы, поступающие в систему 3 электроавтоматики пресса. &лраба7ываемые системой еНектроавтоматики сигналы поступают яа гидроагрегат 12 и Е1рот| аммный аадатчик 13нагрузочных харжтфвстшс гшфоагрега та. По этим сигналам щюясходвт пврвкак чение распределительной гнвроащаратуры, усташтлеиной на гшфош рвгате, что tipiiводит к нагружению мапютрадей ги оагрегата в соответствии с про миммой эало женной в прот шммяюм зэдатчяке наг узочвых хефакт нкггик. Пря яомошн датчвк 1 14освоыалх. пвервм&гроа Ефессованив яа табло индшсадии 4 индипцрукугс гидроагрегата, состоаняа тлзищааж. скгнале системы 3 электроавтоматике также фшсируется на табло индшсавяи. Кроме того, эти выходные сястекш 3 электроавтоматики по каналу о атной связи поступают на блок-преофаэователь 1, который посылает новые командщле олгнблы на cei вопрнво/ы S циклового командоапп шта 7. При необходимости ввести в систему испытания аварийшдй режим или помеху, преп$1тству1сшую движению подвижного механизма пресса (TiiS, моделирующему его сервоприводу), органы управления блока 11 имитации помех отключают соответствующие сервоприводы 8. Наладка системы 3 в толчковых режимах осуществляется с пульта 5 управления органами управления. Наладка гидроагрегата 12 осуществляется при помощи установленой на нем регулирукяцей гидроаппаратуры и контролируется по показаниям табло иникации 4. Таким образом происходит моелирование работы гидравлического преса. Технико-экономическая эффективность уг внедрения предлагаемого устройства определяется повышением пронзводител ности операций отладки в испытаний гидрав лического пресса, а также псяышением их качества. Формула изобретения Моделирующее устройство гидравличеокого пресса йо авт.св. J 475290, о т пичаюшеася тем, что, с п«лью пош 1шения|пронзводнт8льяости отладки и испытаний rHigaaentweisJcoro пресса, а такж повышения качёс-геа (юпыпаний, оно снабжено гищ)оагрегатом с распределительной и регулирующей гидроаппаратурой, программным эадатчиком нагрузочных характерно тик ги/фоагрвгата в датчиками основных параметров прессования, а пшсловой кома доаппарат устройства снабжен программным регулятором сксфоств реверсивных сервоприводов, при этом вход программного з датчика |нагрузочшлх характеристик гидроагрегат соединен с выходом электроавтоматики пресса/входы гидроагрегата - с тлходами эпектроавтоматикн пресса н программного задатчкка нагрузочных характеристик гидроагрегата, а выход гидроагрегата посредством датчиков основных п метров прессования с табло инднкаций7|
