заиных ocoii. Каждьм пр1Г1юд иредсчавляст coooii coBOKviJiiocib двшателя с тормозом, -редукт(ра II датчпког, об|) связи. При oicyicriHUi уцрапляюшсго спгпа.ла на прИПОдс, выходной ппс.юдиего заторможен. На фиг. 2 показана коисгрукгизиая реа.тпзация изобрстемпи. П(.м1од,1 И к11ая (juopa 1 ирсдсгавлястсобой Kopuyoii -K) деталь е гиездо-.м для крепления ир1Н,(1да 9 11()1.()|К)та 11.теча н ,е.1 для крепления бо.ттами 15 к cToiiKe IB. Biji 4vuiO ва. )да 9 (iia че)теже не показам) скреп,чен с подипжпо| | опорой 2, когорая уетанов.чепа па пеподипя поГ: ouojie 1 па по.чилшппка.х 17 н лк)жег врапипься отпс). осп I--1. В под11пжпо| | опоре 2 зак|)е:.чеп прпвод 10 in;isypora плеча, па ш.кчодпом валу когорого уклоп. пюстерпя 18. па одяпи1яея v, 3arie i,Tc;iiin с з бчатым вепп(П 19 корпуса п-рпр.ода 11 поворота П)с;111.течья. Па подип/кноС оно-ре ук11сплс1К1 ось 20 вращения кулисы 21. Oci. 20 п;) в 1пе; До ку.тпсы па подпит.шпках 22.
Шестерня 18 сиабжепа кривошипом 23, с;.и:;аппь:м с 21 21, у,таио.:1.1{М ;;эп на сюпке 25 кул11.:ы. Кривошип 23 i. .-; теп через паз ку,тпс1)Т. Осп вращения плестсрп:: 18 11 корпуса привода 11 погюрота пре.дп.течьи с зубчаты.м вепцом 19 Т1араллел15пы осп -11. Прп это.м ось 20 вращения ку.тисы 21, сгоГгка 25 ку,тпеы, кршкипи,: 23 и ось шестерни 18 расположеп) п о.чпои п.тоскости. Пружина 2-1 з;1крыта, укреплепны.м на ку.тпсе. кожухом 2(х
В лроушппе подвижной опоры с помоии о подшпиппков 27 станов. привод 11 поворота нред1,1ечья, ко|5нус , спабженпьп : зубчатым lieimoM 19, с.ту.жнт осью подвес;: плеча 3. Па выходном ва.ту иривода 1 закреплен, снабженный кривошипом 28, всдуп1.нп б;юк 29 механизма поворота предплечья. Па подг.пжпоп опоре 2 укреплена ось 30 в-рашенпя кулпсы 31. Ось 30 посаже 1а и, тезао ку, на иодшппипках 32. Крпвоипш 28 пропущен через нродо, наз кулмсы 31 и свизаи с ней пружиной 33, закреплеппой па стойке 34 кулисы 31. Оси .5рап1,е1П1я блока 29 п кулне1л 31 параллельпы осп 11 -11. CroiiKa 3-1 и ось 30 вращения ку.тпсы 31 располо ке1и в (;дноГ| плоскости с кр.ивоинпюм 28 и осью .рашепия блока 29. Пружииа 33 закрыта укреплеииьгм на кулисе 31 кожу.чо7. 35.
На корИусе привода 1 1 зак-реидеио .п,1ечо 3, нижний Koueu которого г.ыпо;1исп в впде ви.тки с сооспыми гнездами иод иодшипппками 38, иричем ось 1П-П параллельна осп 11 II и Я1 ляетси otbio качаиия авухзвеипсяо предплечья. Звепо 4 предплечья выполи-ено в виде корпусной детали е гиездом для ирисода 12 поворота кисти и соосиыми даифа.ми 37. Левая цапфа звена 4 удлашсиа, иа иен закреплен ведомый блок 38 механизма поворота предплечья, связанный с ведуацим блоком 29 тросом 39, причем стередаточиое отиошеи1 е этой передачи 1:1.
В иижиеп части приво-да 12 вь лол-испа иосадочиая позерхность для подш1шиико-а 40, иа которых устапозлеио ззеао 5 предплечья, ирнводимое во Вращение относительно-оси IV- IV (ось Поаорота кпсти) выходным элементом (па черт, не показан) привода 12. Ось IV - IV попорота кисти иересекает ось ис-ворота предплечья под иря.мы.м углом, В верхней части звеп.а 5 закреплен привод 13 повс-рота кисти, на Ф,ыхоДИом валу которого закреплен вед}П1пй блок 41 механизма поворота кисти. 11пж; яя часть 5 вы полиспа в апде -вилки с гнездами для иодш ииик:)з 42, ир1гчем
) ось гнезд иересекает ось IV-IV иод иря,мым
yi.TOM.
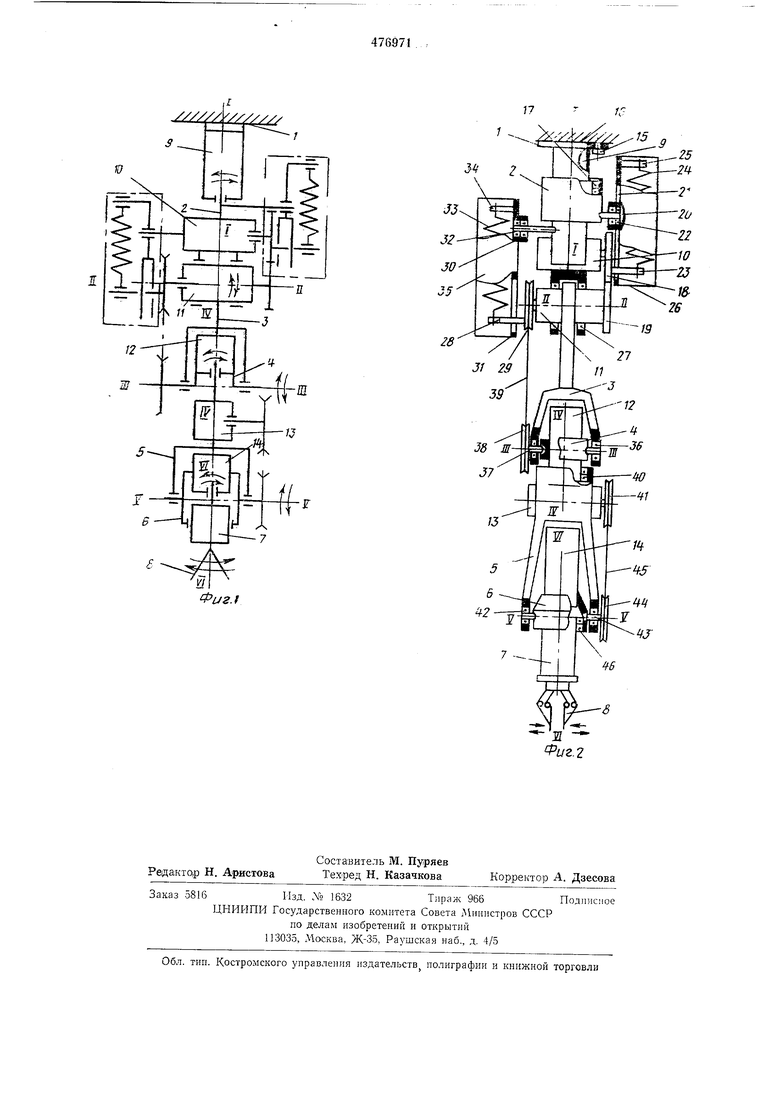
6 вытюлнеиа п виде корлуспой дота.тп с цапфами 43 и цеитром масс, расположенпым иа ОСИ этих цапф. Ма правой удлипеппой иапфе укреп.теп ведомый блок 44 мехаи: :;ма поворота кисти, связаппый с ведущим блокам -П тросом 45. В К11СТИ 6, в соответствующих 1пездах устаповле 1ы ирнвод 14поворота инструмента и нрп.вод 7 сменного пистру.меита с возл|Ожносгь 0 поворота в тюдшипплпсах 46 огпоспте. оси VI-VI, перссекакмпсй ось А---Л .:к)Д п.рямы.м уг.чсм. Ппиаоды 7 п 14 хстапшлеиы is ки:т:1 так, что их пенгры масс )асп;),т;)жепы па (х:и VI-VI по разные стороны or точки ее иересечення с осью -V на расстояниях от оси V-V, обратно пропорциональных величипам масс этих приводов. Такое расиоло ке 1пе .дов 7 н 14 MOICCT быть доститиуто путем балансировки кисти в оборе с приводамп отпосительно цапф 41. Такая компановка кистевого узла обеспечивает распо.тожеппе па оси V-V цеитра масс системы п сле.ювате.тьно отсутствие статического момепга от веса конструкции в шарнире качания кпсгп. Прпвод 7 сменного ниструмента снабжен выходным э,теме 1то-м, обеснечиваЮИ1ПМ eio стыковку с униф.ици.роваин -..м о-мепП1)1М nncrpy-Meirro.M. Па фиг. 2 в качестве lyipH iepa показан ипструмент тииа «плоско-параллельный захват.
В ноказашюм иа фиг. 1, 2 псх-одиом положеНип пс.пол1П1тельпого органа статичсскне моменты от веса ко-иструкцин -в шарнирах качания плеча (ось 1111) и предплечья (ось HI - III) отсутствуют, поскольку центры .масс плеча 3 н пре.дилечья 4 расположеиы под соответствуюшн..ми питрпи.рам.и, В шарнире качаппя кпстп (ось -V) статический MOMeiiT от иеса конеГРУ1ЧЦНИ отсутствует при любом по.тоженнп кпстп 6.
Д| 11жепня элемепгов нсполшпсльиого органа нро;тсхо.чят iTfjii иодаче иа соответсгвуюшие н).1ы у:1ра1,.дя1()щих сигна,то-.1з. Нри отсутствии ун|)ав.:|Я1()шего сн1иата иризод работает как жесткий конструкционный элеме гг. поскольку то)мозо.м, который 15К,тючаегся только при иодаче управляющего сигнала.
Лодача уиравляющего сигнала на привод 9 цриводит к повороту относительно оси 1-1 подвижной опоры, скрепленной с выходным валом прп.вода 9 п сидящей на псподзпжьзй опоре 1.
При налнчп управляющего сипсала иа ирпводе 10 вращается шестерня 18 с ;рпг.;;шин я1
2.:. что iipiicvuiT к поворот} кппмуоп npiiiio.ia 11. 11оскол1 ку 11ос,-1СД11 1п сиязли с шсч-тернеп 18 своим зубчатым -веиио-М 19. Скрсп.тсмпюс с корпусом привода 11 плечо откло;)яется от вертикального 1юло ке1П1я. .что iipiiaoAirT к ИОЯВЛРIUI1O статического момента в шарнире качан 1я плеча (ось II-И). Отклонение кривошипа 23 от общей с осью 20 .вертикали -вызывает IH BOрот кулисы 21, поскольку .крийошим 23 взаимоленствует с кулисы. Возникающип ири этом от деформации иружииы 24 люмеит относительно оси вращения шестерни 18 равен но величине моменту от iseca конструкции относительно ООН II-И, по направлен в противоположную CTOpoiry. Такилг образом комненсируегся статический момент, возипкаюшнн ;: шарии.ре качания плеча (ось II-II) при отклоиеирщ плеча 3 от вертикального но,тожеи 1я. Статический люмент. возникающий в шарнире качаиия иредилечья (ось 111-III) npn работе прпвода 10 передается в шарннр качаипя плеча (ось II-П) через блок 38, трос 39 и блок 29. Если управляющий сигнал на 11 качания иредилечья отсутствует, то блок 29 поворачивается BMceie с плечом 3, и взаимное расположение плеча 3 и предплечья 4 ие меняется. Поворот звена 4 приводит к отклонению кривошипа 28 от обшей с осью 30 верт1и али, повороту кулпсы 31 п возппкиовопню уравиовситваюшего момеита от деформаии 1 пружииы 33. Этот момент равеи ио .вс.чимине статпческол1у момеиту от веса комструкпии, действующему в качаипя предплечья (ось 111-ГИ), 110 противоиоложеи ему rio направлению. При у.чравляюшсго сигнала только в и:риводе 11 уравновешпваюии1й механизм ра-ботает аналогично. При од1 овремеииой работе приводов 10 п 11 механизмы 23, 21, 24, 25 компенсируют статическл| | oмellт от веса конструкиии В шарнире камаиня илеча (ось ), а механизмы 28, 31, 33.
3 -статический момогг от веса конструкппк ..изиикаыиим :; шарнире качаиия ирет,илечья (ось III -1П).
Таким образолг, в предлагаемой конструкипн 11сио..-|ьного оргаи.а стагичсские .момеиты от веса качаюнпьчсм .улемепто констГукдии 1авиовеш(:И1)1, ч го сугиественпо увелг чиваот груз(ио;п,еми(Хть и улучшает динамические характерист1гк:1 манипулятора; Пеуравновешеииыми остаются только статические моменты от веса сменно1о 1нструме1гга и по.1езн(1Й нагрузк.
11 I е .4 м е г } 3 о б ji с т е н н я
1.I ).1ниге; Ь:1ыГ1 орган мапину.чятора с шарнпрно сосднисн1П.)111 иеиодвиж;мй и нххт.ипжно oHOjiaMii. п.чечом, нредн.чсчьсм, кистью, смешплм инструмент(П п расио.-цтженными иеносредстр,ен:1п на приводами иоворотов этих ззеньев, (П .тчающт/с.ч тем, что, с и,е,1ью иов1 1П1ения гр)з(1иодьемиости у.чучшеиия дииамнчгскн.х хапакгористик. ишриипы liOBOрота п,1еча :: нредм.мспл с;1аб ксг,ы нружиино-ку.тисиьр 11 }paiuioBCHi;:tiainHUiM; Ajcxainnмами, чт;м1);,.н.И11Ыми подвн/кпип i yi-ijie и KOM ie:uii.j)yiO:nnMH статические мсплчиы от г.еса KOiicTjiyKuini, а кисть г месте с установлс ;;;,1ми lia Hcii приводам пистрхменIa вьгиол;.. стаТ1 чески урав1 ове1нспм.ч ()сите.тыю ciuicfi оси .
2.11сио. иительп.1й ма ;|улл гора ио н. 1, от.тчающчпс.ч тем, что 1риводы ног-ороTOii п. i 11е;и1лечья снабжен, ,аМ н с корн V хОМ Hpi вода ).рота ред. еч11Я и преди.чсч:,ем, а . ., с на
COOT eTCTByiOUU X кулис
iexailнзмo; iioiiOpOTa и.теча и Г1н чги-10м.я т;
связан, с . С IOM()UU,in у рп i,:0:,eH П .
-«
W
Фиг.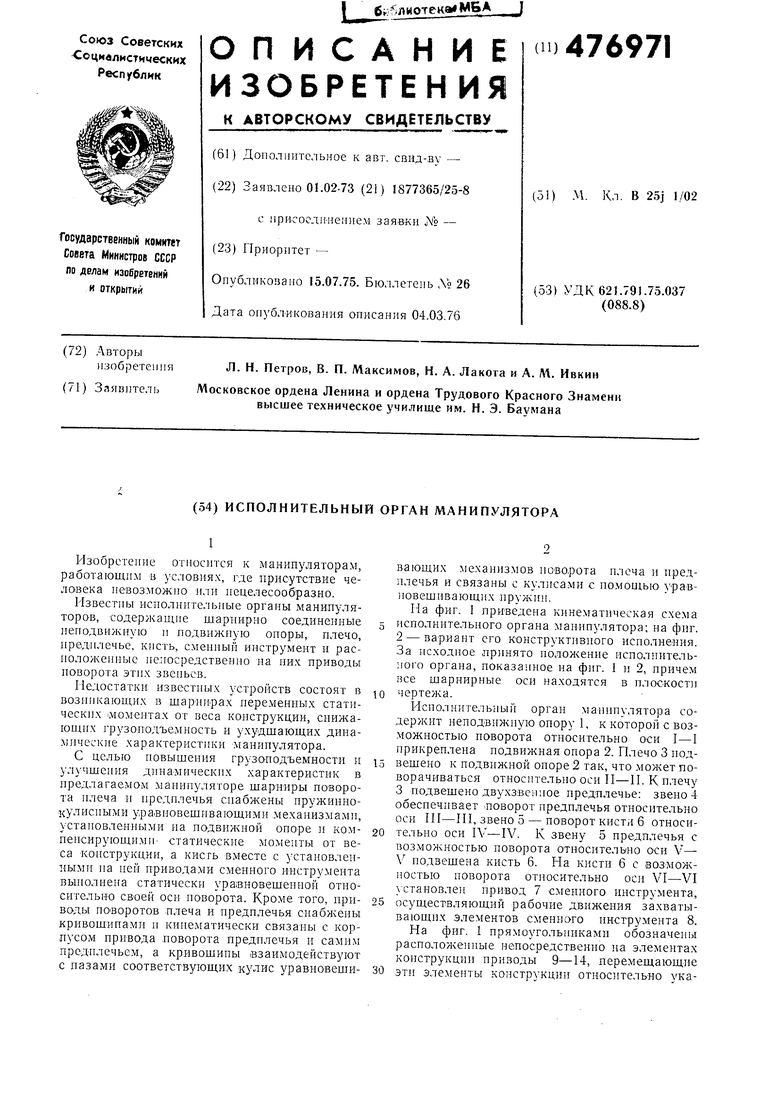
| название | год | авторы | номер документа |
|---|---|---|---|
| Задающий орган манипулятора | 1976 |
|
SU564150A1 |
| Задающий орган манипулятора | 1979 |
|
SU895639A1 |
| Исполнительный орган манипулятора | 1975 |
|
SU560746A2 |
| МАШУЩИЙ ДВИЖИТЕЛЬ | 1993 |
|
RU2089461C1 |
| Механизм локтевого шарнира | 1982 |
|
SU1024080A1 |
| ПРИБОР ДЛЯ СИНТЕЗА ШЕСТИЗВЕННОГО КУЛИСНОГОМЕХАНИЗМА | 1969 |
|
SU237396A1 |
| Исполнительный орган манипулятора | 1991 |
|
SU1779587A1 |
| Антропоморфный манипулятор | 1989 |
|
SU1646850A1 |
| Рука манипулятора | 1978 |
|
SU715317A1 |
| Многофункциональный активный протез руки | 1981 |
|
SU1009456A1 |