1
Изобретение относится к машиностроеншо и может быть использовано в различных робототехнических устройствах.
Известна рука манипулятора, содер кащая основание, подвижную опору, шарнирно сочлененные звенья плеча и предплечья с приводами поворота этих звеньев и пружинные разгрузочные устройства плеча и предплечья l.
Однако поворотные кулисы в разгрузочных устройствах существенно увеличивают вес и усложняют конструкцию.
Цель изобретения - уменьшение веса манипулятора и упрощение его конструкции.
Это достигается благодаря тому, что каждое пружинное разгрузочное устройство снабжено опорными роликами и гибкими элементами, проходяшими через них, пружины этих устройств соединены одними концами с подвижной опорой, а другими - с гибкими элементами, причем один гибкий элемент соединен с плечом, а другой через кривошип, установленный
на оси поворота плеча, связан с предплечьем через механическую передачу.
Механическая передача выполнена в виде системы цилиндрических колес и перекрестной Гибкой передачи.
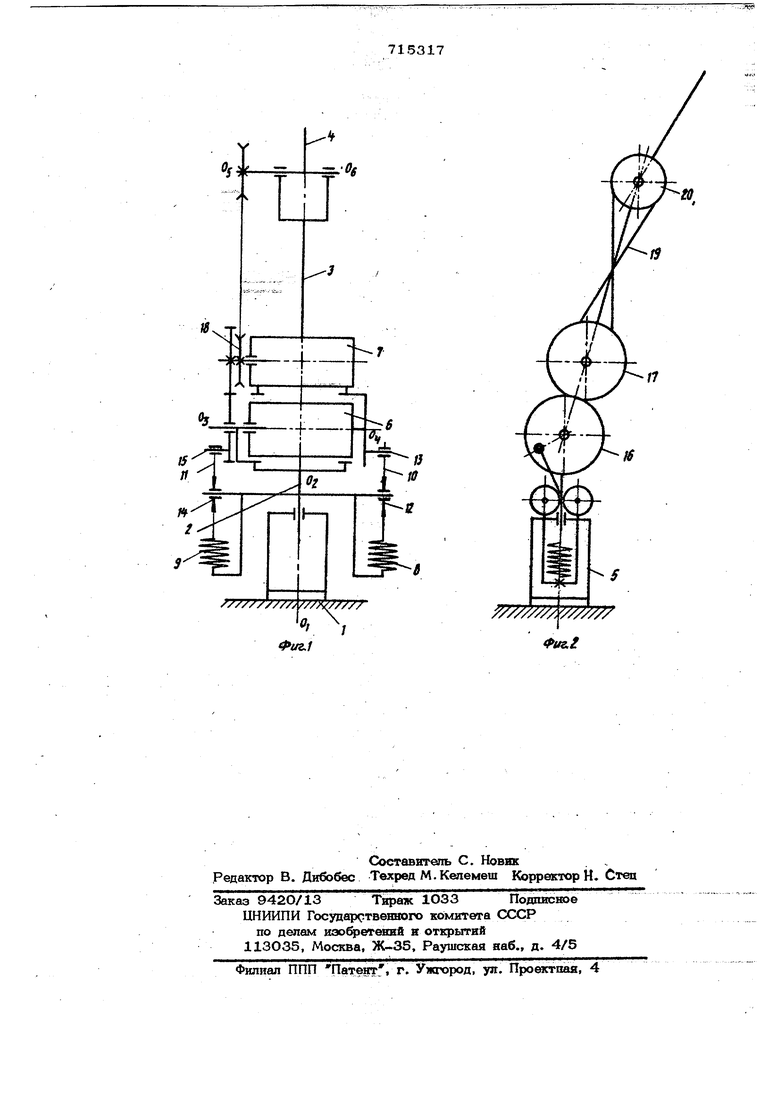
На фиг. 1 дана кинематическая схема руки манипулятора (вид спереди); на рис. 2 - то же, вид сбоку.
Рука манипулятора состоит из основания 1, к которому с возможностью поворота относительно оси О О л пршфеплена подвижная опора 2. К опбре 2 прикреплено с возможностью поворота о.ткосительно оси плечо 3. Предплечье.4 прикреплено к плечу 3 с возможностью, поворота относительно оси OgO. Поворот подвижной опоры, плеча и предплечья осуществляется приводами 5-7. К подвижной опоре 2 прикреплены соответственно через пружину 8 уравгювешивания плеча и пружину 9 уравновешивания предплечья гибкие элементы Ю и 11.
Гибкий элемент 10 проходит через опорные ролики 12 к закреплен другим концом через подшипник на кр1шошипе 13 жестко связанном с плечом 3. Гибкий элемент 11 проходит через опорныеролики 14 и закреплен йругим концом чфез подшипник на К1эивошипе 15 жестко связанным с шестерней 16, установленной на подшипнике оси ,- Шестерня Д 6 находится в заиеплшии с шестерней 17, жёстко связайноЙ с ведущим блоком 18, устанощендам на вьстодном валу привода 7. Ведущий блок 18 с 1ЬМощью перекрестной передачи. 19 связан с ведомым блокс { 2О, жестко установленном на предплечье 4. В рабочем положении рука манипулятора закреплена так, чтобы ось привода 5 подвижйой опоры 2 совпадала с направлением вектора силы тяжести. Подача управляющего сигнала на привод 5 приводит к повороту о таосятепьно оси 0 Р подвижной опоры 2Га тйсже плеча 3 я предплечья 4. При работе руки манипулятора статические нагрузвя отвеса звеньев воспринимаются как реакции опоры пр}шода 5 поворота подвижной опоры 2, так как ось привода 5 совпадает с вектором силы тяжести. Работа, например, привода 7 I BCBOдит к перилещеник) с одной стороны пред плечья 4 механическую передачу, образованную блоками 18 и 2О и гибким элементом 19, а с другой стороны;пружины 9 шестерни 16 и 17, кривошип 15, гибкий элемент 11 и ролики 14. При этом статический момент от 7; 4 предплечья 4 всегда урамговоигива1 тся моментом, bbisBaHHbrNt силами упруххэй деформации пружины 9. ормула изобретения 1.Рука манипулятора, содержащая основание, подвижную опору, шарнирно сотоененные енья плеча и предплечья с приводами поворота этих звеньев и пружин- ; ные разгрузочные устройства плеча и предплечья, о т л ичающаяся г&А, что, с палью уменьшения веса и упрощения конструкции, каждое пружинное разгрузочное ycTpoifcTBO снабжено опорными роликами и гибкими элементами, проходящикш них, пружины этих устройств соединены одними концами с подвижной опорой, а другшли - с гибкими эл« еятами, причем один гибкий элемент соединен с плечом, а другой через кривошип установленный на оси поворота плеча, связан с предплечьем через механическую передачу. 2.Рука по п. i, , о т л и ч а юш а я с я тем, что механическая передача вьтолнейа в виде системы цилиндричестшх колес и перекрестной гибкой п юдачи. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельств СССР № 541662, кл. В 25 J 1/О2, 13.О6.75 (прототип).
.1
/////////Y ///// ,г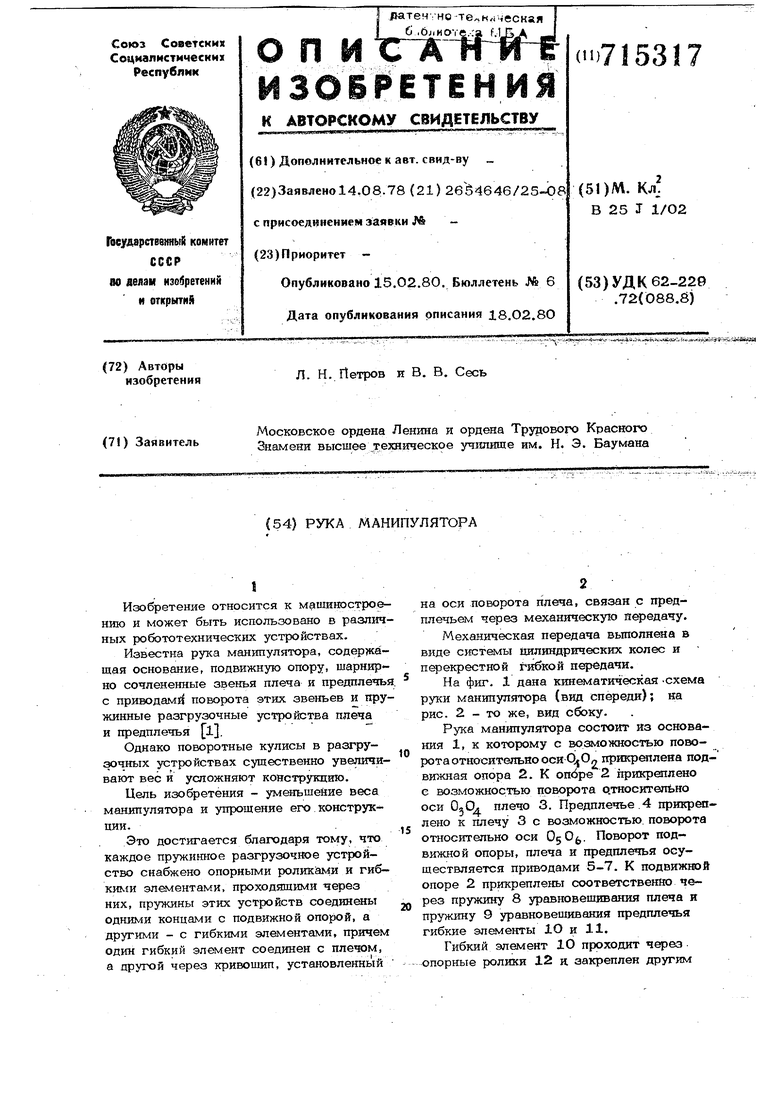
| название | год | авторы | номер документа |
|---|---|---|---|
| Рука манипулятора | 1979 |
|
SU874332A2 |
| Рука манипулятора | 1983 |
|
SU1133085A1 |
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2003 |
|
RU2241594C1 |
| Исполнительный орган манипулятора | 1975 |
|
SU541662A2 |
| Задающий орган манипулятора | 1976 |
|
SU564150A1 |
| Модуль руки промышленного робота | 1991 |
|
SU1757869A1 |
| Манипулятор | 1982 |
|
SU1085804A1 |
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| МАНИПУЛЯТОР | 1991 |
|
RU2022784C1 |
| Исполнительный орган манипулятора | 1975 |
|
SU560746A2 |