(54) ЗАДАЮЩИЙ ОРГАН МАНИПУЛЯТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Исполнительный орган манипулятора | 1991 |
|
SU1779587A1 |
| Исполнительный орган манипулятора | 1973 |
|
SU476971A1 |
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2003 |
|
RU2241594C1 |
| Манипулятор | 1987 |
|
SU1517252A1 |
| Исполнительный орган манипулятора | 1975 |
|
SU560746A2 |
| МАНИПУЛЯТОР РОБОТА | 2015 |
|
RU2616317C1 |
| Механизм локтевого шарнира | 1982 |
|
SU1024080A1 |
| КОМБИНИРОВАННЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ЛЕГЧЕ ВОЗДУХА (ВАРИАНТЫ) | 2006 |
|
RU2318697C2 |
| Исполнительный орган манипулятора | 1975 |
|
SU541662A2 |
| Задающий орган манипулятора | 1979 |
|
SU895639A1 |
1
Изобретение относится к манипуляторостроению и может найти применение в различных отраслях техники.
Известен задающий орган манипулятора, звенья которого соединены подвижно , а
статические моменты в щарнирах от веса конструкции компенсируются с помощью противовесов 13.
Однако в нем имеется два существенных Недостатка; во-первь1х, отсутствует возможность его перемещения в горизонтальной плоскости, во-вторых, значительно увеличивается его вес и инерционность из-за применения противовесов, компенсирующих статические моменты в шарнирах.
Целью предложенного изобретения является устранение указанных недостатков известного задающего органа манипулятора и облегчение работы оператора.
Для этого подвижная опора и плечо
задающего органа манипулятора расположе- нь1 таким образом, что их оси вращения горизонтальны и перпендикулярны друг друг уравнопещиваюи.ий механизм плеча выполнен в виде пружины, один коней которой закреп
лен на неподвижной ;опоре, а второй свя- . зан с плечом гибкой свйзью, наприме р тросом, проведенным по неподвижному и пои- . вижному блокам, установленньтм на неподвижной опоре, причем подвижный блок подпружинен и установлен с возможностью поворота относительно вертикальной оси, уравновешивающий механизм предплечья выполнен в виде противовесов, расположенных симметрично относительно оси вращения .подвижной опоры, а кисть с рукоятью схвата вьшолнена статически уравновещенной.
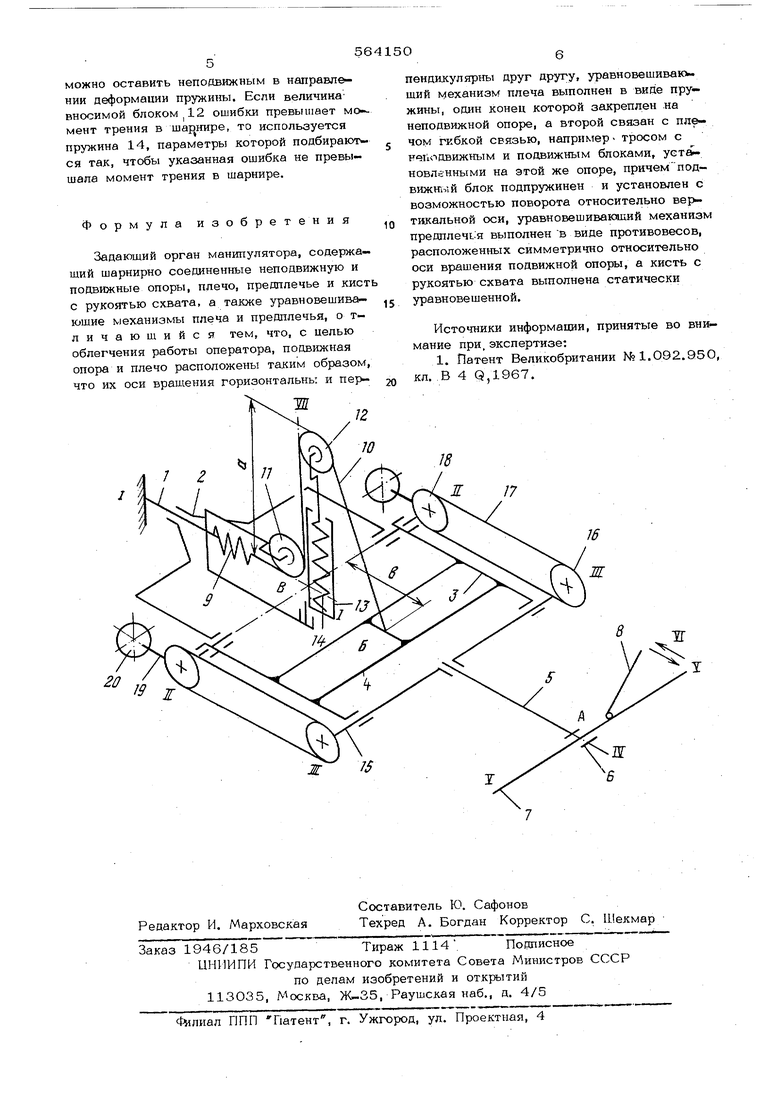
На чертеже показана пространственная кинематическая схема задающего, органа манипулятора в.исходном положении, когда оси всех шарниров расположены в горизо№тальной плоскости.
Задающий орган содержит неподвижную опору 1, на которой установлена опора 2, подвижная с возможнос ью вращения относительно оси I-I. Подвижная опора 2 имеет софсные проушины, в которых устано&лено плечо 3, имеющее возможность вращения относительно оси 11-11 , пересекающей ось I-I под прямым углом. Плечо 3, в.
свою очередь, имеет соосные проушины, в которых установлен с возможностью вращения относительно осиШ-Ш корпус 4 локтевого шарнира. В корпусе 4 локтевого.шарнира установлено предплеЩ)е 5 с возможностью j вращения относительно осиW-IV, пересекающей осьШ-Ш под прямым углом. В подшипнике 6 предплечья 5 установлена кисть 7 с рукоятью схвата 8. OcbV-V вращения кисти пересекает ocblV-lV вращения пред- Q плечья под прямым утлом. Направление перемещения рукояти схвата 8 показано стрелками VI . На неподвижной опоре 1 закреплена пружина 9 так, что ее свободный конец связан гибкой связью,в данном слу- 5 чае тросом ,10с плечом 3. Гибкая связь 10.проходит через неподвижный 11 и подвижный 12 направляющие блоки, установленные на неподвижной опоре 1. Подвижный блок 12 установлен на неподвиж- 20 ной опоре 1 с помощью кронштейна 13, который может вращаться относительно оси711-VII пересекающей ось 1-1 вращения подвижной опоры 2 под прямым углом. Подвижный блок 12 имеет также возможность 25 перемещаться относительно кронштейна 13, деформируя при этом пружину 14.
На цапфах 15 корпуса 4 локтевого шарнира закреплены блоки 16, связанные, наприкэр тросами 17с блоками 18, ocii зо вращения которых совпадают с осью И-II вращения плеча 3, На блоках 18 закреплены рычаги 19 с противовесами 20, причем центры масс противовесов расположены на рычагах. Передаточное отношение между 35 блоками 16 и 18 равно единице, а рычаги 19 параллельны предплечью 5.
Осиы ,11-11 ,iiMii,iv-iv, V-V ,vii-vn
оснащены позиционными чувствитель- ными элементами (например потенцио- 40 метра н), позволяющими измерять тлы между соответствующими подвижными звень- ями. Чувствительные элементы на схеме не показаны.
Задающий орган работает следующим об- 45 разом.
Оператор, прикладь;вая рукой усилие к кисти 7, с помои ью рукояти схвата 8, перекгещает звенья задающего органа. Углы между звеньями измеряются чупстпи- 50 тельными элек;ентами и в виае соэтвотствуюишх сигналов поступают в схелгу JTTравления пспоапнительным органохг.
Повороть кисти 7 относительно ocnV-V и совместно с предплечьем 5 относ15тель-/55 но ocnrV-lV не меняют статические ю ;ентЫ их относительно этих осей, поскольку центр масс системы кисть 7 - рукоять хвата 8 находится на пересечении осей -VnIV-IV в точке Л. Ьомпоиовогно такое
решение не представляет трудностей и в специальном объяснении не нуждается.
Поворот системы звеньев кисть 7 - преплечье 5 - корпус 4 локтевого шарнира относительно осиШ-Ш приведет к изменению статического момента относительно этой оси по синусоидальному закону, где аргументом является угол между направлением осиУ11-Ш1и предплечьем 5, Вместе с корпусом локтевого щарнира повернутся жестко связанные с ним блоки 16. На этот же угол и в ту же сторону повернутся блоки 18 относительно оси11-П,а вместе с ними - рычаги 19, несущие противовесы 2О. Статические моменты противо-. весов 20 относительно осиЦ-Нбудут менятся по тому же синусоидальному закону, но будут противоположны по направлению моменту указанной системы звеньев. Длина ряз1чагов 19 и суммарная масса противовесов 2О должны подбираться так, чтобы в проекции на плоскость, параллельную направлениям осей 1-1 иVlI-Vllcтaтичecкий момент противовесов относительно осиП-И. был равен по величине, но противоположен по направлению статическому моменту сио- темь звеньев кисть 7 - предплечье 5 - корпус 4 локтевого шарнира относительно оси1П-111. Распределение масс между противовесами должно быть таким, чтобы в проеции на плоскость, перпендикулярную оси 1-1 сумма статических моментов противовесов и указанной системы звеньев относительно этой оси была равна О.
При повороте плеча 3 относительно оси П-И статический момент его относительно этой оси меняется также по синусоидальному закону, где аргументом является угол к;ежду плечо г 3 и направлением оси VII-VII. При этом меняется расстояние между точкой Б крепления гибкой связи Ю к плечу 3 и пoдвIiжны : направляющим блоком 12. ОдноЕременно меняются расстояние а (поскольку блок 12 подпружинен) и величина деформации, пружшш 9. Эти изменения влияют на величину момента, созааваемого пружиной 9 относительно ОСИП-II, кохгпенсирующего статический момент плеча 3 относительно этой оси.
Наличие направляк:-шего блока 12 вносит ошибку в работу уравновешивающего механизма, EJeniiHHna этой ошибки зависит от соотношения величин а . Ь н шшметра блока 12 и возрастает при этклоиений плеча 3 от исходного 11оложеи11я вниз. При достаточно больших величинах а и и мапо . диa eтpe блока 12 ошибка уравновешивания :.ены1;е NOMeHTOD тре-ния в шарнирах и сю можно пренебречь. В этом случа пр жина 1-1 но нужна, поскольку блок 12
можно оставить неподвижным в направл&нии деформации пружины. Если величина вносимой блоком Д 2 ошибки превышает MOi мент трения в шаднире, то используется пружина 14, параметры которой подбираются так, чтобы указанная ошибка не превышала момент трения в шарнире.
Формула изобрет е н и я
Задающий орган манипулятора, содержащий шарнирно соединенные неподвижную и подвижные опоры, плечо, предплечье и кист с рукоятью схвата, а также уравновешивающие механизмы плеча и предплечья, о тличаюшийся тем, что, с целью облегчения работы оператора, подвижная опора и плечо расположены таким образом, что их оси вращения горизонтальны и перьпендикулярны друг другу, уравновешивакь. ший механизм плеча выполнен в виде пружины, один конец которой закреплен .на неподвижной опоре, а второй связан с плечом гибкой связью, например - тросом с нег одвижным и подвижным блоками, установленными на этой же опоре, причем под- ВИЖН-П1Й блок подпружинен и установлен с возможностью поворота относительно Bej тикальной оси, уравновешивакяций механизм предплечья выполнен в виде противовесов, расположенных симметрично относительно оси врашения подвижной опоры, а кисть с рукоятью схвата выполнена статически уравновешенной.
Источники информации, принятые во вн№мание при,экспертизе:
