(54) ИСПОЛНИТЕЛЬНЫЙ ОРГАН МАНИПУЛЯТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Исполнительный орган манипулятора | 1975 |
|
SU541662A2 |
| Исполнительный орган манипулятора | 1991 |
|
SU1779587A1 |
| Задающий орган манипулятора | 1976 |
|
SU564150A1 |
| Манипулятор | 1979 |
|
SU871991A1 |
| Манипулятор | 1980 |
|
SU919804A1 |
| Исполнительный орган манипулятора | 1980 |
|
SU906685A1 |
| Исполнительный орган манипулятора | 1983 |
|
SU1123227A1 |
| Исполнительный орган манипулятора | 1973 |
|
SU476971A1 |
| Копирующий манипулятор | 1989 |
|
SU1646842A1 |
| Рука манипулятора | 1978 |
|
SU715317A1 |
1
Изобретенне относится к машиностроению, а именно к манипуляторам для работы в зонах радиоактивного излучения, под водой, в космосе и т.д.
По основному авт.св. № 476971 известен исполнительный орган манипулятора, содержащий соединенные подвижную и неподвижную опоры, плечо, предплечье, клеть, сменный инструмент, пружинно-кулисные уравновешивающие механизмы и расположенные непосредственно на них приводы поворота этих звеньев.
Цель изобретения - повышение точности позицно1шрования.
Это достигается тем, что привод поворота плеча смонтирован соосно оси его поворота и привода поворота предплечья, а эти приводы кинематически связаны с пружинно-Кулисными уравтговешиваюшими механиз 1ами, например, цияи1щрической зубчатой передачей.
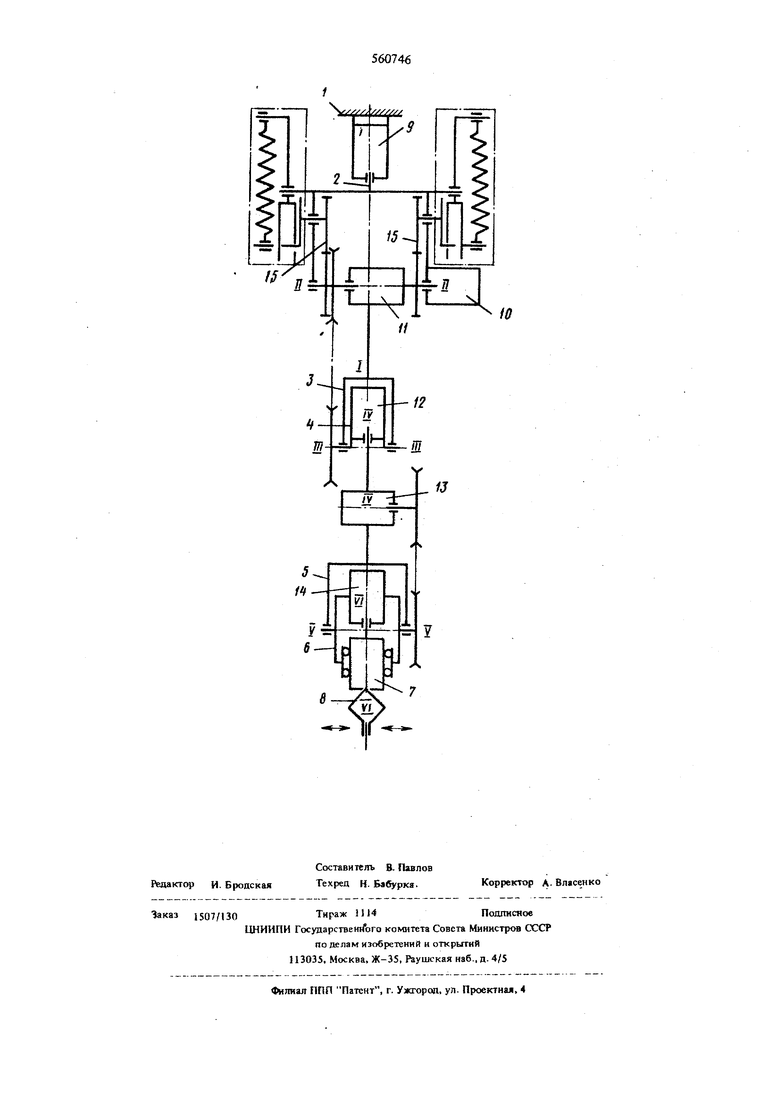
На чертеже приведена кинематическая схема предлагаемого исполнительного ма пшулятора в исходном положении, при этом все шарнирные оси расположены в плоскоста чертежа.
Исполнительный орган манипулятора содержит неподвижную опору 1, к которой с возможностью поворота относительно осн 1-1 прикреплена подвижная опора 2. Плечо 3 подвешено к подвижной опоре 2 так, что может поворачиваться относительно оси II-II. К плечу 3 подвешено двухзвенное предплечье 4 и 5. Звено 4 предплечья обеспечивает поворот предплечья относительно оси Ill-Ill, а звено 5 предплечья - поворот кисти 6 относнгельио оси IV-IV. К звену 5 предплечья с возможностью поворота относнтельно оси V-V подвешена кисть 6. На ней с возможностью поворота относительно оси VI-VI установлен привод 7 сменного ииструмента, осуществляющий рабочие движения захватываюидих элементов сменного инструмента 8.
Шарниры поворотов плеча и предплечья снабжены пружинно-кулисными уравновешивающими механизмами, установленными иа подвижной опоре и колшенсирующими статические моменты от веса конструкции, а кисть вместе с установленными на ней приводами смешюго инструмента выполнена статически уравновешенной относительно своей оси поворота.
Прямоугольниками 9--14 обозначены расположенные непосредстве1шо на элементах конструкюш приводы, перемещающие эти элементы относительно указанных осей.
В предлагаемом исполнительном органе привод 10 поворота плеча смонтирован соосно оси 11-11 его поворота н привода i 1 поворота предплечья. Пртводы 10 н 11 кинематическн связаны с пружинно-кулисными уравновешнвающими механизмами зубчатой цилиндрической передачей 15.
Каждый привод представляет собой совокупвосп двигателя с тормозом, редуктора и датчиков обратных связей. При отсутствии управлянидего енгнала на П1жводе выходной вал последнего за..
Рвбота исполнительного органа манипулятора осупэствляется следующим образом. ижения элементов исполнителшого органа 1 исходят при подаче на соответствующие ириво№U равляющих сигналов. При отсутствии управляющего сигнала привод работает как -жесткий конструкционньй элемент, поскольку снабжен тормозом, который включается только арк подаче управляющего сигнала.
Подача управляющего сигнала на щжвод 10 приводит к noaqpoTy плеча 3 относительно оси 11-11. Скрепленное с корпусом пртвода 11 плечо 3 отклоняется, что приводит к появлению статического момента в шарнире, которое уравновещивается пружинно-кулисными механизмами. Формула изобретения
Исполнительный орган манипулятора по авт. св. 476971, отличаю щи и ся тем, что,с цельно повьщБния точности позиционирования, привод по-ворота плеча смонтирован соосно оси его поворота и привода поворота предплечья, а этн пртводы кинематически связаны с пружшшо-кулисными уравновещивающими меха шзмами, например, цилиндрической зубчатой передачей.
