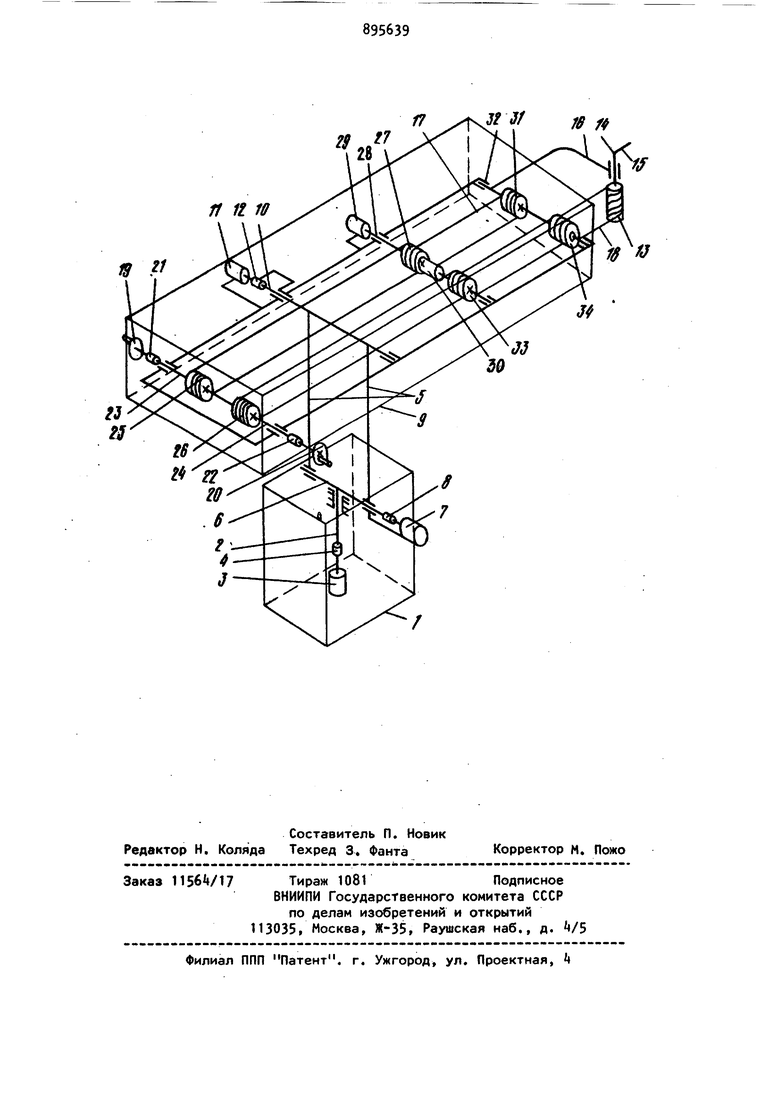
Изобретение относится к области м шиностроения и может быть использовано для составления и корректировки программ антропоморфных манипуляторов. Известен задающий орган манипулятора содержащий плечо, предплечье, кисть с шарниром качания ее в вертикальной и горизонтальной плоскостях, датчики положения кисти, имеющие электромагнитные муфты и механические передачи, связывающие эти датчики с соответствующими шарнирами 1. Недостатками этого органа являются жесткая кинематическая связь с ма нипулятором, не позволяющая независимое их взаимное перемещение, значительные габариты как устройства в целом, так и кисти, не позволяющие О слеживать траектории в полостях малых размеров. Цель изобретения - упрощение конструкции и уменьшение габаритов задающего органа уменьшения габаритов кисти. Поставленная цель достигается тем, что задающий орган манипулятора снабжен рукоятками управления шарнирами КИСТК-, установленными в. предплечье и связанными при помощи механической передачи, выполненной в виде трособлочной системы, имеющей тросы, блоки и;промежуточные блоки для каждого шарнира кисти, а датчики положения кисти установлены в предплечье, причем корпус датчика положения кисти в вертикальной плоскости жестко связан с предплечьем, а его выходной вал жестко связан с промежуточным блоком трособлочной системы качания кисти в вертикальной плоскости, при этом корпус, датчика положения кисти в горизонтальной плоскости жестко связан с промежуточным блоком тросрблочной системы качания кисти в вертикальной плоскости, а его выходной вал жестко связан с промежуточным блоком трособлочной системы качания кисти в горизонтальной плоскости, кроме того, электромагнитные муфты датчиков положения кисти в горизонтальной и вертикальной плоскостях установлены на рукоятках управления шарнирами кисти. На чертеже представлена кинематическая схема задающего органа манипулятора. Задающий орган манипулятора сот, стоит из основания 1, внутри которого к оси 2 прикреплен датчик угла поворота плеча 3 и электромагнитная муфта k плеча 5, соединенного с осью 6, саязаиной с датчиком положения плеча 7 через электромагнитную муфту 8. Предплечье 9, представляющее собой двуплечий рычаг, качающийся на оси 10, соединенной с датчиком угла поворота 11 электромагнитной муфтой 12. На конце большого плеча предплечья 9 имеется кисть, состоящая из блока 13, ось которого 1, снабженная щупом 15, смонтирована в кривошипе 16. Трособлочная система представляет собой две замкнутые ветви тросов 17 и 18, каждая из которых управляется рукоятками управления 19, ZO, сЬединенные через электромагнитные муфты 21, 22 с осями 23, 2 ведущих блоков 25, 26, причем через первый из них осуществляется кинематическая связь с промежуточным блоком 27 трособлочной системы качания кисти в вертикальной плоскости, своей осью 28 свя занным с выходным валом датчика 29 положения кисти в вертикальной плоскости, корпусом датчика 30 положения кисти в горизонтальной плоскости, блоком 31, жестко закрепленным на оси 32, в свою очередь, жестко связанной с кривошипом 16, а через второй - с блоком 33, закрепленным на выходном валу датчика угла поворота кисти в горизонтальной плоскости 30, блоком З, свободно вращающимся на оси 32, и блоком 13. Задающий орган манипулятора работает следующим образом. Перед формированием программы для манипулятора, задающий орган устанавливают неподвижно на основании 1. На пропорционально уменьшенной модели обрабатываемой детали намечают легко различимыми линиями траекторию щупа 15, имитирующего движения 94 инструмента манипулятора. Затем устанавливают модель, если она будет в статическом состоянии, или закрепляют на транспортирующем устройстве, если она будет обрабатываться на транспортирующем устройстве, на таком расстоянии , чтобы амплитуды колебаний звеньев задающего органа обеспечивали контакт щупа 15 со всеми поверхностями модели, на которые нанесены траектории движения щупа 15 при формировании программыо Оператор, перемещая рукоятки управления 19, 20 в пространстве и (или) вращая их, обеспечивает движение щупа 15 по намеченным на модели траекториям. При вращении рукояток управления 19, 20, качании предплечья 9 вокруг оси 10, наклоне и повороте плеча 5 сигналы о датчика 3 поворота плеча, датчика 7 качания плеча, датчика 11 качания предплечья, датчика 29 положения кисти в вертикальной плоскости и датчика 30 положения кисти в горизонтальной плоскости записываются устройством формирования программы. Транспортирующее перемещение предплечья 9, обеспечивающее три из пяти степеней подвижности щупа 15 осуществляется оператором путем поворота в горизонтальной плоскости предплечья 9 относительно оси 2, качания в вертикальной плоскости относительно оси 10 и продольного смещения за счет поворота вокруг оси 6. Две степени свободы перемещения щупа 15 кисти обеспечиваются вращением рукояток управления 19 и 20 трособлочной системы. Перемещение в двух взаимно перпендикулярных плоскостях происходит за счет вращения блока 13 тросом 18 и за счет поворота в вертикальной плоскости кривошипа 16, При этом угол поворота последнего считывается датчиком 29 положения кисти в вертикальной плоскости. При этом оператор должен вращать как рукоятку управления 19, так и 20 для компенсации изменения верхней и нижней частью троса 18 расстояния между блоками 13 и З, при этом считывание угла поворота происходит за счет поворота выходного вала датчика 30 положения кисти в горизонтальной плоскости. Если происходит поворот щупа 15 одновременно в двух плоскостях, то считывание угла поворота происходит как за счет взаимного поворота корпуса и выход5 . ного вала ротора датчика 30 положения кисти в горизонтальной плоскости, так и за счет поворота выходного вала датчика 29 кисти в вертикал ной плоскости, В зависимости от того, какую из степеней свободы перемещения кисти, плеча 5 или предплечья 9 необходимо исключить, включается одна или груп па электромагнитных муфт. Использование задающего органа майипулятора вместо непосредственно самого манипулятора для формирования программы исключит остановку основного технологического оборудования для составления программы при ее составлении методом обучения. Формула изобретения Задающий орган манипулятора, содержащий плечо, предплечье, кисть с шарнирами качания ее в вертикальной и горизонтальной плоскостях,датчики положения кисти в этих плоскостях, имеющие электромагнитные муфты и ме ханические передачи, связывающие эти датчики с соответствующими шарнирами, отличающийся те что, с целью упрощения конструкции и уменьшения габаритов, он снабжен рукоятками управления шарнирами кисти, установленными в предплечье и связанными при помощи Механической передачи, выполненной в виде трособлочной системы, имеющей тросы, блоки и промежуточные блоки для каждого шарнира кисти, с соответствующими шарнирами, а датчики положения кисти установлены в предплечье, причем корпус датчика положения кисти в вертикальной плоскости жестко связан с предплечьем, а его выходной вал жестко связан с промежуточным блоком трособлочной системы качания кисти в вертикальной плоскости, при этом корпус датчика положения кисти в горизонтальной плоскости жестко связан с промежуточным блоком трособлочной системы качания кисти в вертикальной плоскости, а его выходной вал жестко связан с промежуточным блоком трособлочной системы качания кисти в горизонтальной плоскости, кроме того, электромагнитные муфты датчиков положения кисти в горизонтальной и вертикальной плоскостях установлены на рукоятках управления шарнирами кисти. Источники информации, принятые во внимание при экспертизе 1. Манипуляторы , Каталог-справочник. Л., 1968, с. 87. 29 7 ff 11 W /y // I 28 J/ J/ / /
| название | год | авторы | номер документа |
|---|---|---|---|
| Исполнительный орган манипулятора | 1983 |
|
SU1123227A1 |
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2003 |
|
RU2241594C1 |
| Исполнительный орган манипулятора | 1991 |
|
SU1779587A1 |
| Копирующий манипулятор | 1989 |
|
SU1646842A1 |
| Исполнительный орган манипулятора | 1975 |
|
SU541662A2 |
| Задающий орган манипулятора | 1976 |
|
SU564150A1 |
| Манипулятор | 1980 |
|
SU919804A1 |
| УНИВЕРСАЛЬНЫЙ КОМПЛЕКС ДОЛИНСКОГО УКД, СЕКЦИЯ КРЕПИ (ВАРИАНТЫ), ПЕРЕКРЫТИЕ КРЕПИ, ВЫДВИЖНОЙ КОЗЫРЕК, СТАВ, ЛЕНТОЧНЫЙ КОНВЕЙЕР, МЕХАНИЗМ ЦЕНТРИРОВАНИЯ ЛЕНТЫ, УСТРОЙСТВО УПРАВЛЕНИЯ КОНВЕЙЕРА, КОМБАЙН ОЧИСТНОЙ (ВАРИАНТЫ), УСТРОЙСТВО ПОДЪЕМА БАРАБАНА КОМБАЙНА, ПРИВОД ОТБОЙНОГО БАРАБАНА КОМБАЙНА, СПОСОБ ОБЕСПЫЛИВАНИЯ РАБОЧЕГО ПРОСТРАНСТВА, УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ, МАНИПУЛЯТОР ОЧИСТНОГО КОМПЛЕКСА, ЛЕСТНИЦА СТОЕЧНАЯ | 1997 |
|
RU2130554C1 |
| Многофункциональное устройство управления подвижным объектом | 2015 |
|
RU2616231C2 |
| Исполнительный орган манипулятора | 1973 |
|
SU476971A1 |