1
Изобретеиие отпосится к автоматике и может использоваться для управления перемещением механизма по горизонтали и вертикали с получением точных конечных положений.
Известно устройство для программного управления подъемно-транспортным механизмом, содержащее регистр адреса и шифратор, выходы которых подключены к соответствующим входам блока сравиения, блок горизонтальиого перемещения, входы которого соединены с соответствующими выходами блока сравнения, блок вертикального перемещения, вход которого подключен к одному из выходов блока сравиения, а выход - к входу регистра адреса.
Из-за воздействия на транспортный механизм различных факторов, таких, как износ тормозных колодок, непостоянный момент инерции механизма, неравномерность характеристики срабатывания датчиков положения, уклон пути и т. д., возможны неточный останов мехаНИЗма по горизонтали и выдача команды на вертикальное перемещение при неточном горизонтальном останове.
Целью изобретения является повышение надежности работы механизма.
Это достигается тем, что предлагаемое устройство содержит элемент задержки и логическую схему «ИЛИ, входы которой соединены с соответствующими выходами блока горизонтального перемещения, а выход логической схемы «ИЛИ через элемепт задержки соедш еп с дополпительпыми входами блоков горизонтального и вертикального перемещеНИИ.
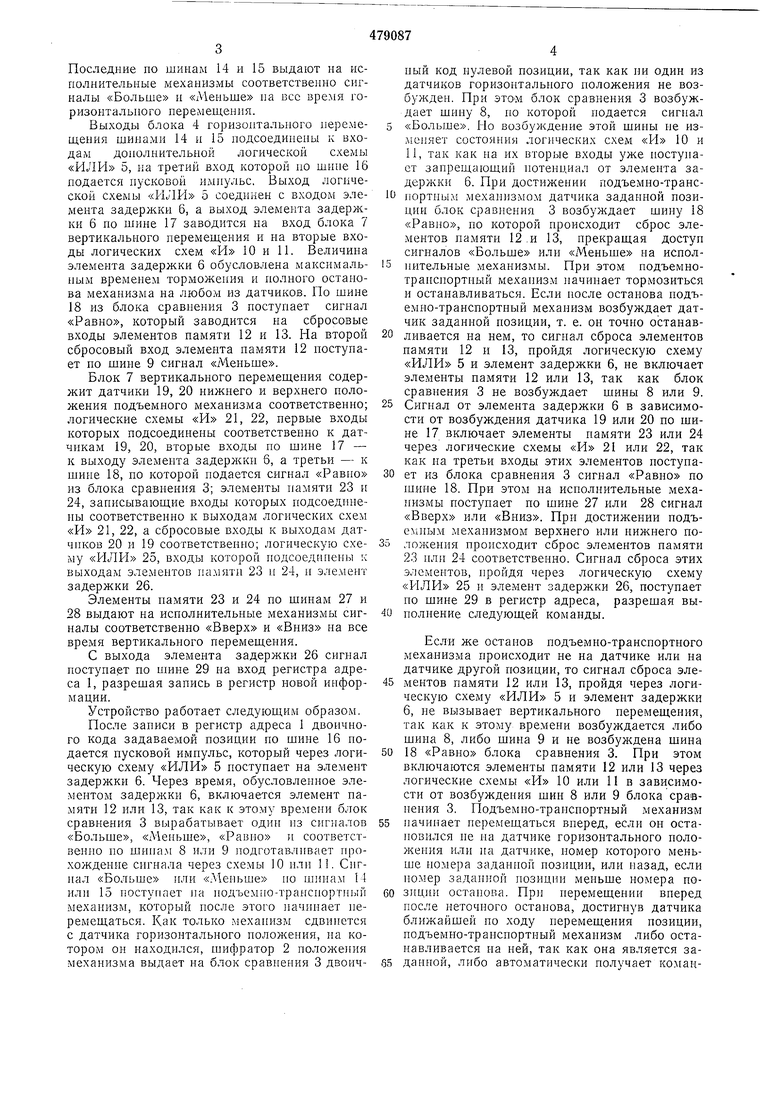
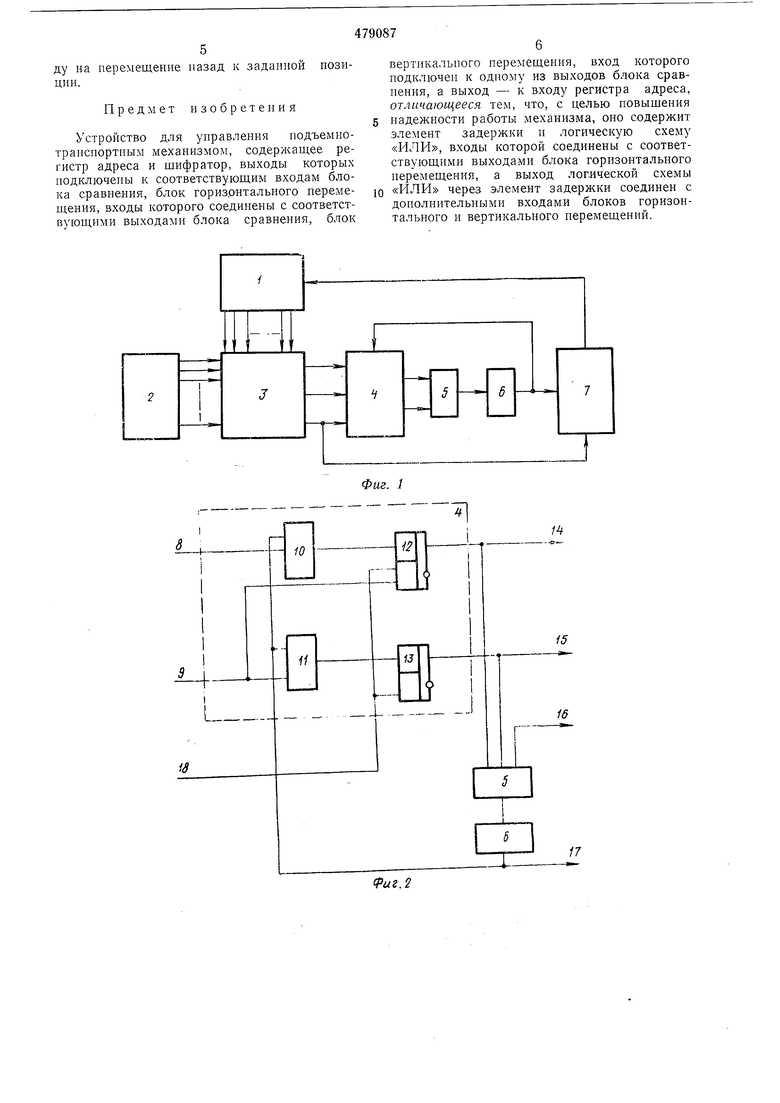
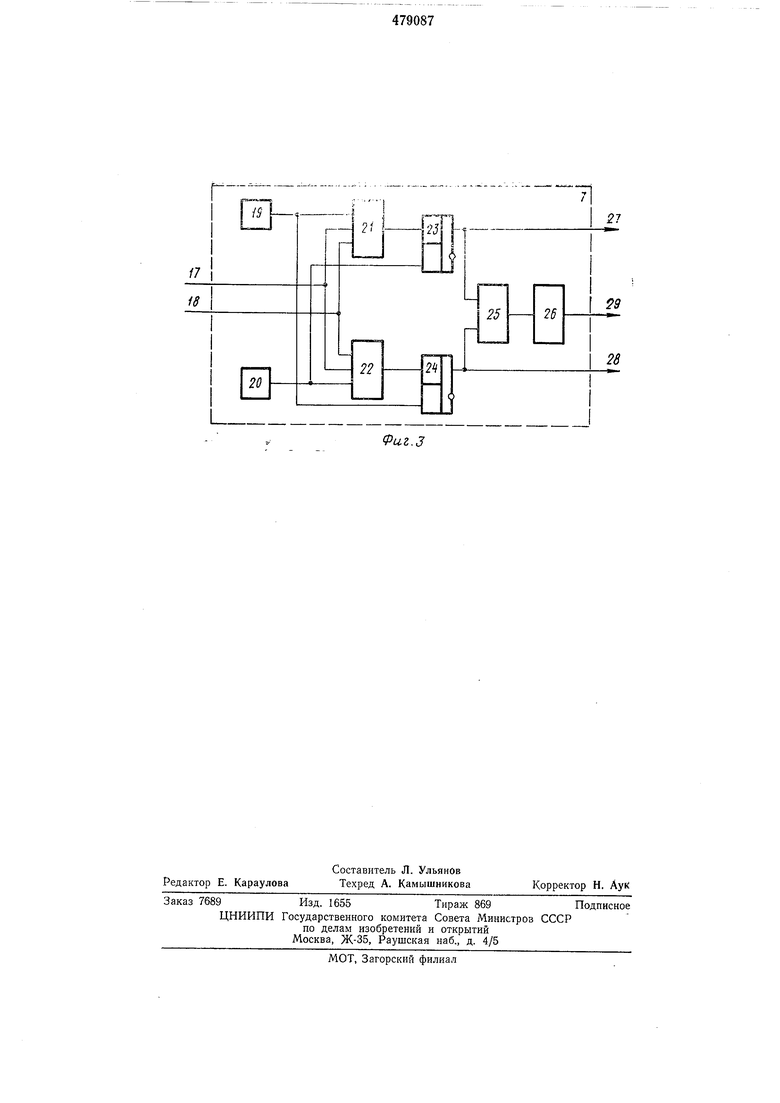
На фиг. 1 представлена структурная схема предлагаемого устройства; на фиг. 2 и 3 - структурные схемы блоков горизонтального и вертикального перемещений.
В предлагаемом устройстве регистр адреса 1 задаваемой позиции и шифратор 2 положения механизма по горизонтали подсоединены своими выходами к блоку сравнения 3, выходы которого подсоединены к входам блока
4 горизонтального перемещения. Выходы блока горизонтального перемещения подсоединены к входам последовательно соединенных логической схемы «ИЛИ 5 и элемента задержки 6, выход последнего связан с входами
блока 7 вертикального перемещения и блока 4 горизонтального перемещения. Один из выходов блока сравнения 3 подсоединен к входу блока 7 вертикального перемещения, выход которого подсоединен к регистру адреса 1.
Сигналы «Больше и «Меньше, вырабатываемые блоком сравнения 3, поступают соответственно по шинам 8 и 9 (фиг. 2) на первые входы логических схем «И 10 и 11, выходы которых подсоединены соответственно к записывающим входам элементов памяти 12 и 13.
Последние по шинам 14 и 15 выдают на исполнительные механизмы соответственно сигналы «Больше и «Меньше на вес время горизонтального неремешення.
Выходы блока 4 горизонтального неремещення шинами 14 и 15 иодсоединеиы к входам дополнительной логической схемы «ИЛИ 5, на третий вход которой но шние 16 подается иусковой имнульс. Выход логической схемы «ИЛИ 5 соединен с входом элемента задержки 6, а выход элемента задержки 6 но шине 17 заводится на вход блока 7 вертикального иеремеш.ения и на вторые входы логических схем «И 10 и 11. Величина элемента задержки 6 обусловлена максимальиым временем торможения и нолного останова механизма на любом из датчиков. По шине 18 из блока сравиення 3 поступает сигнал «Равно, который заводится на сбросовые входы элементов памяти 12 и 13. На второй сбросовый вход элемента памяти 12 поступает по шине 9 сигнал «Меньше.
Блок 7 вертикального неремеш,еиия содержит датчики 19, 20 нижнего и верхнего положения подъемного механизма соответственно; логические схемы «И 21, 22, первые входы которых подсоединены соответственно к датчикам 19, 20, вторые входы но шине 17 - к выходу элемента задержки 6, а третьи - к шине 18, но которой подается сигнал «Равно из блока сравнения 3; элементы памяти 23 и 24, записывающие входы которых нодсоедниены соответственно к выходам логических схем «И 21, 22, а сбросовые входы к выходам датчиков 20 и 19 соответственно; логическую схему «ИЛР1 25, входы которой нодсоедипены к выходам элементов памяти 23 и 24, и элемент задержки 26.
Элементы намяти 23 н 24 но шинам 27 и 28 выдают на исполнительные механизмы сигналы соответствеино «Вверх и «Вниз на все время вертикального перемешения.
С выхода элемента задержки 26 сигнал поступает по шине 29 па вход регистра адреса 1, разрешая запись в регистр новой информации.
Устройство работает следующнм образом.
После записи в регистр адреса 1 двоичного кода задаваемой позиции по шине 16 подается пусковой импульс, который через логическую схему «ИЛИ 5 поступает на элемент задержки 6. Через время, обусловленное элементом задержки 6, включается элемент памяти 12 или 13, так как к этому времени блок сравнения 3 вырабатывает один из сигналов «Больше, «Меньше, «Равно и соответственно но шипам 8 или 9 подготавливает прохождение сигнала через схемы 10 пли 11. Сигнал «Больше пли «Меньше по шинам 14 или 15 поступает iia нодъемно-транснортный механизм, который носле этого начинает неремеш,аться. Как только механизм сдвинется с датчика горизонтального положения, на котором он находился, шифратор 2 положения механизма выдает на блок сравнения 3 двоичный код нулевой позиции, так как ни один из датчиков горизонтального положения не возбужден. При это блок сравнения 3 возбуждает шнну 8, но которой подается сигнал
«БОьТьше. По возбуждение этой шины не изменяет состояния логических схем «И 10 и 11, так как па их вторые входы уже иоступает запреш,ающий иотенцнал от элемента задержки 6. При достиженни подъемно-транспортным лЛ1еханнзмом датчика заданной позицни блок сравиения 3 возбуждает шину 18 «Равно, но которой нроисходит сброс элементов намяти 12 ,и 13, нрекраш,ая доступ сигналов «Больше или «Меньше на иснолнительные механизмы. При этом подъемнотранснортиый механизм начинает тормозиться и останавливаться. Если носле останова нодъемно-транснортный механизм возбуждает датчик заданной позиции, т. е. он точно останавлнвается на нем, то сигнал сброса элементов намяти 12 и 13, пройдя логическую схему «ИЛИ 5 и элемент задержки 6, не включает элементы памяти 12 или 13, так как блок сравнения 3 не возбуждает шины 8 или 9.
Сигнал от элемента задержки 6 в зависимости от возбуждения датчика 19 или 20 по шине 17 включает элементы памяти 23 или 24 через логические схемы «И 21 или 22, так как иа третьи входы этих элементов поступает из блока сравнения 3 сигнал «Равно но шиие 18. При этом на исиолнительные механизмы поступает но шине 27 или 28 сигнал «Вверх или «Вниз. При достижении нодъемиым механизмом верхнего или нижнего положения происходит сброс элементов памяти 23 или 24 соответственно. Сигнал сброса этих элементов, иройдя через логическую схему «ИЛИ 25 и элемент задержки 26, поступает по шине 29 в регистр адреса, разрешая вынолнение следуюш,ей команды.
Если же остаиов нодъемно-транспортного мехаиизма происходит не на датчике или на датчике другой позиции, то сигнал сброса элементов намяти 12 или 13, пройдя через логическую схему «ИЛИ 5 и элемент задержки 6, не вызывает вертикального перемещения, так как к этому времени возбуждается либо шина 8, либо шина 9 и не возбуждена шина
18 «Равио блока сравнения 3. При этом включаются элементы памяти 12 или 13 через логические схемы «И 10 или 11 в зависимости от возбуждения шин 8 или 9 блока сравнения 3. Подъемно-транснортный механизм
начинает перемешаться внеред, если он остановился не па датчике горизонтального положеиия или на датчике, номер которого меньше номера заданной нозиции, или назад, если номер заданной позиции меиьше номера нозиции останова. Прн неремещепии виеред после неточного останова, достигнув датчика ближайшей по ходу иеремеш;еиия позиции, иодъемно-транснортный механизм либо останавливается на ией, так как она является заданной, либо автоматически получает комаиду на перел1ещеиие назад к заданной позиции.
Предмет изобретения
Устройство для управления нодъемнотрансиортиым механизмом, содержащее регистр адреса и шифратор, выходы которых подключены к соответствующим входам блока сравнения, блок горизонтального перемещения, входы которого соединены с соответствующими выходами блока сравнения, блок
вертикального перемещения, вход которого подключен к одному из выходов блока сравнения, а выход - к входу регистра адреса, отличающееся тем, что, с целью повышения
надежности работы механизма, оно содержит элемент задержки и логическую схему «ИЛИ, входы которой соединены с соответствующими выходами блока горизонтального иеремещения, а выход логической схемы
«ИЛИ через элемент задержки соединен с дополнительными входами блоков горизонтального и вертикального перемещений.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления автооператорами автоматической линии | 1976 |
|
SU616610A1 |
| Устройство для управления подъемно-транспортным механизмом | 1978 |
|
SU959037A2 |
| Устройство для программного управления подъемно-транспортным механизмом | 1982 |
|
SU1048456A1 |
| Устройство для программного управления подъемно-транспортным механизмом | 1984 |
|
SU1166063A2 |
| Устройство для управления подъемно-транспортным механизмом | 1984 |
|
SU1241193A1 |
| БУФЕРНОЕ ЗАПОМИНАЮЩЕЕ УСТРОИСГСО | 1970 |
|
SU287123A1 |
| Устройство для управления автоматическими линиями | 1983 |
|
SU1149223A1 |
| Устройство для обработки и передачи информации учета товарной нефти | 1987 |
|
SU1416978A1 |
| Устройство для программного управления автооператорами гальванической линии | 1979 |
|
SU857935A1 |
| Устройство для программного управления технологическим оборудованием | 1989 |
|
SU1714575A1 |
71
