(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ АВГООПЕРАТОРАМИ АВТОМАТИЧЕСКОЙ
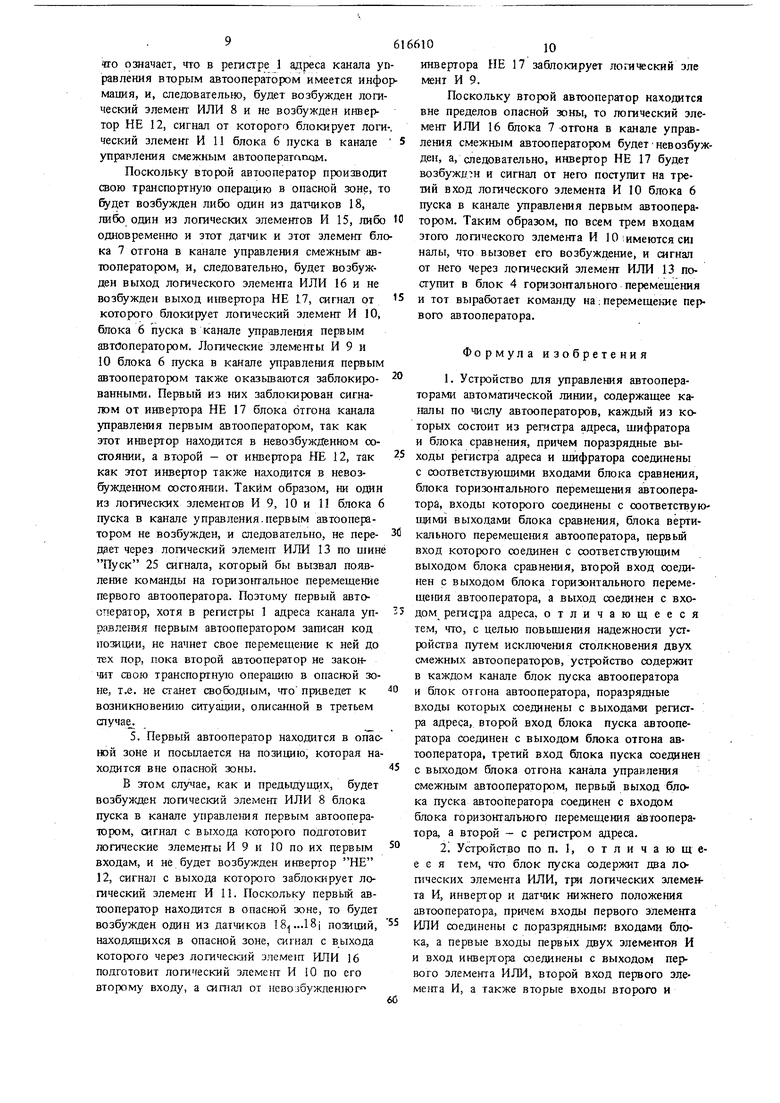
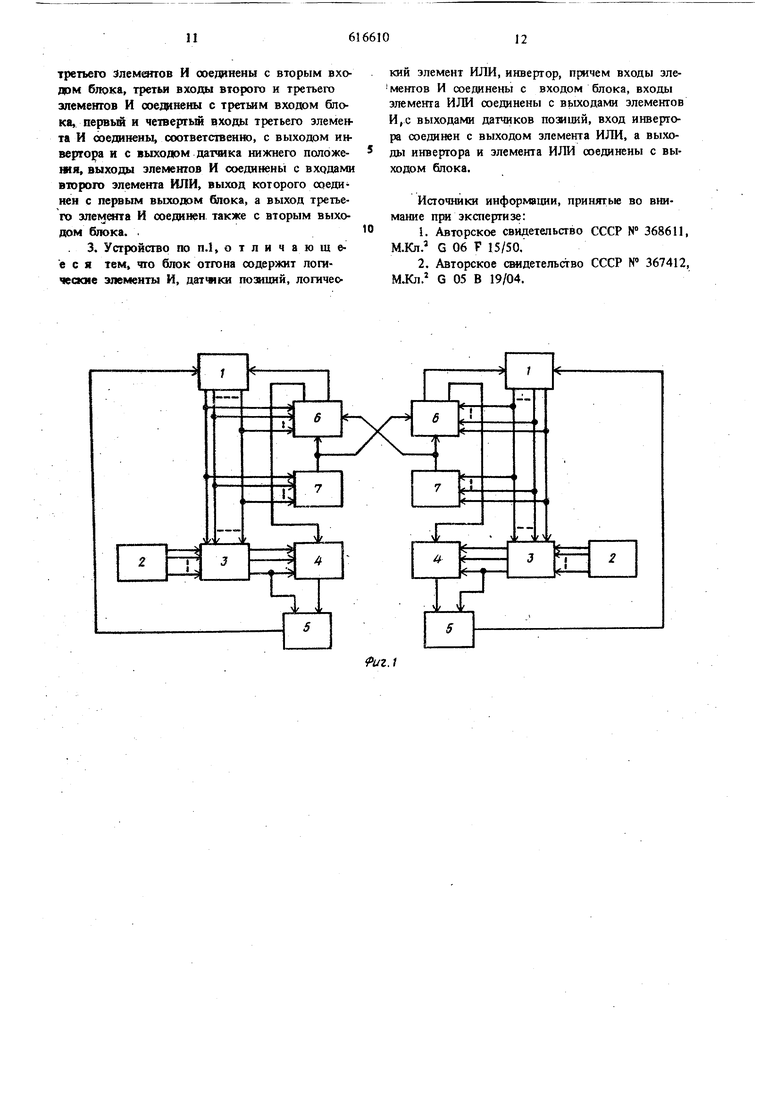
ЛИНИИ 3 тооператора, a второй с регистром адреса; бло пуска содержит два логаческих элемента ИЛИ. трл логаческих элемента И и инвертор и датчик нижнего положения автооператора, причем входы первого элемента ИЛИ соединены с поразрядными входами блока, а первые входы первых двух элементов И и вход инвертора соединены с выходом первого элемента ИЛИ, второй вход первого элемента И, а также вторые входы вгорого и третьего элементов И соединены с вторым входом блока, третьи входы второго и третьего элементов .И соединены с третшм входом блока, первый и четвертьш вход третьего элемента И соединены соответственно с выходом инвертора и с выходом дат чика нижнего положения, выходы элементов И соединены с входами второго элемента ИЛИ, вькод которого соединен с первым выходом блока, а выход третьего элемента И соединен также со вторым выходом 5лока и блок отгона содержит логические элементы И, датчики позиций, логический элемент ИЛИ, инверторj причем входы элементов И ооеданены с входом блока, входы элемента ИЛИ соединены с выходами элементов И с выходами датчиков поЭМШ1Й, вход инвертора соединен с выходом элемента ИЛИ, а выходы инвертора и элемента ИЛИ соединены с выходом блока. На фиг. 1 представлена блок-схема усгройсгва; на фиг. 2 покаэана блочно-принципиальная схема устройства; на фиг. 3 показана схема блока горизонтального перемещения автооператора. Устройство содержит регастр I, шифратор 2, блок сравнения 3, блок 4 горизонтального перемещения автооператора, блок 5 вертикального перемещения автооператора, блок 6 1туска автооператора, блок 7 отгона автооператора, ло гаческий элемент ИЛИ 8, логические элементы И 9, 10, II, HiiBepTop НЕ 12, ло гаческий элемент ИЛИ 13, датчик 14 нижнего положения. автооперахора, логические элементы И 15, логаческий элемент ИЛИ 16, инвертор 17 НЕ, датчик 18 пожций останова автооператора, на ходящиеся в опасной зоне (датмки опасной зо ны), логаческий элемент И 19, логаческий элемент К 20, элемент памяти 21, элемент памяти22, логический элемент ИЛИ 23, элемет- задержки 24, шину Пуск 25, ишгу Больше 26, шину Меньше 27, шину Равно 28, . шину Вперед 29, шину Назад 30, шину Начало вертикалыюго перемещення 31 „ В каждом канале устройства (см. фиг. 1) регистр 1 адреса задаваемой позиции и шифратор 2 положения автооператора на линии подсоединены своими поразрядными выходами к блоку 3 сравнения, выходы которого подсоеда нены к входам блока 4 горизонтального перемещения. Выход блока 4 горизонтального перемеще1шя подсоединен к входу блока 5 верти кального перемещения, другой вход которого соединен с соответствующим выходом блока 3 сравнения. Выход блока 5 вертикального перемещения соединен с входом регистра 1 адреса, поразрядные выходы которого подсоединены также к блоку 6 пуска автооператора и блоку 7 отгона автооператора. Второй вход блока 6 пуска авхооператора соединен с выходом бпока 7 отгона автооператора. Третий вход блока 6 пуска автооператора соединен с выходом блока 7 отгона канала управления смежным автооператором. Первый выход блока 6 пуска автооператора соединен с входом блока 4 горизонтального перемещения, а второй - с регастром адреса. Блок 6 пуска автооператора (см.фиг.2) содерммт два логических элемента ИЛИ, три логаческих элемента И, инвертор и датчик нижнего положения автооператора. Входь логического элемента ИЛИ 8 соединены с поразрядными вьиода.вди регастра 1 адреса. Первые входы логаческих элеменггов И 9 и 10 и вход инвертора НЕ 12 соединены с выходом логического элемента ИЛИ 8. Второй вход логаческого элеMsma И 9 соединен с выходом инвертора НЕ 17 блока 7 отгона автооператора. Вторые входы логических элементов И 10 и 11соединены с выходом логаческого элемента ИЛИ 16 блока 7 отгона азтсоператора. Третий вход логического элемента И 10 соединен с выходом инвертора 17 блока 7 отгона канала управлешьч смежным азюоператором. Tpexid вход логеческого элемента И 11 соединен с выходом лошческого элемента ИЛИ 16 блока отгона каггала управления автооператором. Четвертый вход лоп1ческогоэлеме гта И 11 соединен с выходом датчика14 ш{жнего положения штанги автооператора. Выхошя логаческих злемен- гов И 9, 10 и II соедине11ы с входами логического злемеша ИЛИ 13, выход которого соединен с входом блока 4 горизонтального перегжщения. Выход логического злемзита И 11 соединен также с входом регистра I адреса. Блок 7 отгона aBTOonepaToj:;a содержит логические элементы И 15 ..Л5( количество которых равно количеству позищш, находящихся в опасной зоне, логаческий элемент ИЛИ 16, инвертор НЕ 17 и датчики 18... 18 j позиций опасной зоны. Входы логаческих элемеюов И 15 .„ 15| соединены с соответствующими поразрядными выходами регастра 1 адреса так, что при запига в 1 адреса двоичного кода позиции, находящейся в опасной зоне, возбуждается выход оддого из логических элементов И 15, ...15j, Выходы логаческих элементов И 15 ...15 соединены с входами логаческого элемента ИЛИ 16, к другим входам которого подсоединены выходы датчиков 8 ....18j пожций останова автооператора в зоне. Выход логического элемента ИЛИ 16 соединен с входом инвертора НЕ 17, а также с вторыми входами логаческих элементов И 10 и И блока 6 пуска автооператора и с третьим входом логаческого элемента И 11 блока пуска 6 канала управления смежными автооператорами. Выход инвертора НЕ 17 соединен с вторым входом логического элемента И 9 блока 6 пуска автооператора и с третьим входом логического элемента И 10 блока 6 пуска канала управления смежным автооператором.
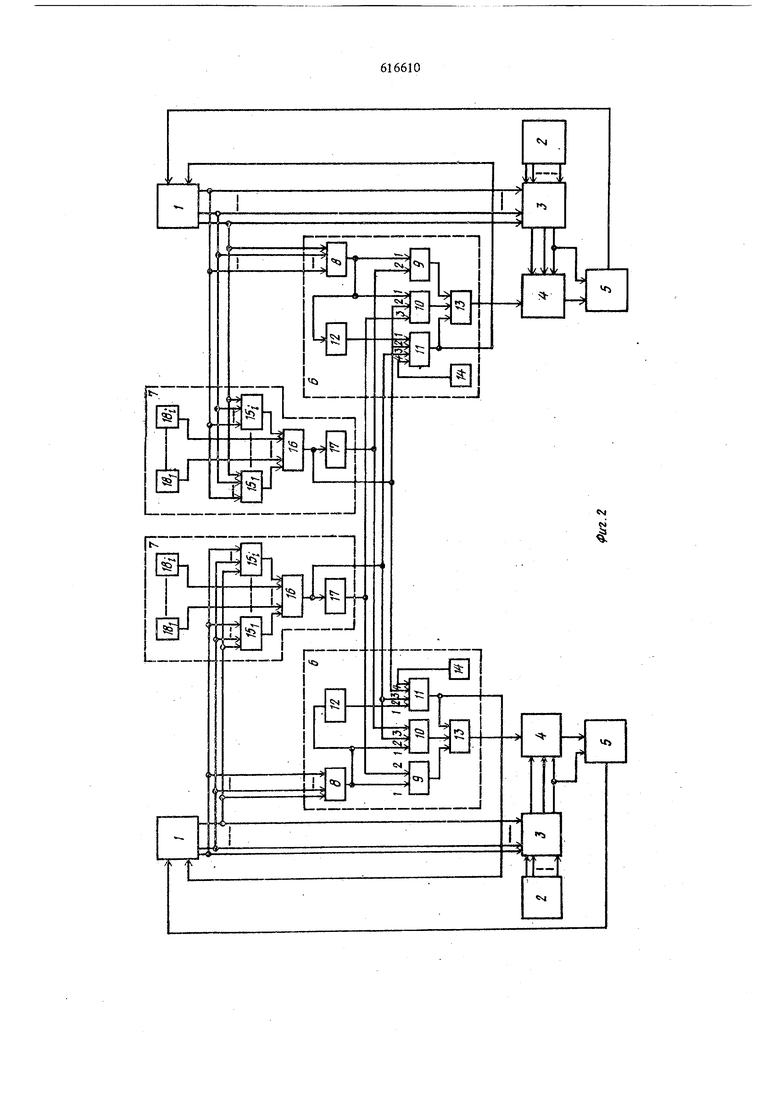
Блок 4 горизонтального .перемеще1шя (см. фиг, 3) содержит логические элеменгы И 19 и 20, элементы памягги 21 и 22, логический элемент ИЛИ 23 и элеменг 24 задержки. Первые входы элементов И 19 и 20 по шинам 26 и 27 соответственно, по которым поступают сигналы Больше и Меньше, подсоединены к блоку 8 сравнения. Выходы логических элеметов И 19 и 20 подсоединены к записьшающим входам элементов 21 и 22 пам5гги, соответственно, сбросовые входы которых по шине 28 Равно подсоединены к блоку 3 сравнения. Прямые входы элементов 21 и 22 памяти по тинам 29 и 30, соответственно, выдают на автооператор командь1 Вперед и Назад, инверсные же выходы подключены ко входам логического элемента ИЛИ 23, третий вход которого по шине ПУСК 25 подсоединен к блоку 6 пуска автооператора. Выход логического элемента ИЛИ 23 гюдсоединены к входу элемента 24 задержки, выход которого по шине Начало вертикального перемещения 31 соединен с входом блока 5 вертикального перемешения и с вторым входом логических элементов И 19 и 20.
Устройство работает следующим образом. После записи в регистр 1 адреса канала управления первым автооператором двоичного кода позиции, к которой посылается автооператор, блок 3 сравнения, сравнивая информацию, посгупаюшую на него из регистра 1 адреса и шифратора 2 положения автооператора на линии, вырабатьшает один из сигналов Больше и Меньше, которые по шинам 26 и 27 поступают, соответсгвен1ю, на логические элеметы И 19 и 20 блока 4 горизонтального перемещения, подготавливая одну из них по первому входу. Одновре менно с этим, на входе логического элемента ИЛИ 8 блока 6 пуска автооператора-появляется (лгнал, который подготавливает логические элементы И 9 и. 10 блока 6 пуска автооператора по их первым входам и переводит инвертор НЕ 12 в невозбужденное состояние. Сигнал от этого инвертора блокирует логический элемент И 11 по его первому входу.
Работа устройства в различных ситуадиях, которые могут возникнуть н линии при совмесгной работе двух автооператоров:
Г. Опасная зона свободна, а позиция, к которой посылается автоопсратор, находится вне . опасной зоны. В этом не будет возбужден ни один из датчиков §, ...18j ак как автооператор находится вне опасной зоны, и не будет возбужден ни один из выходов логических элементов И 15, ...15| так как в регастр 1 адреса записан код позиции, которая также как и автооператор, вне опасной зоны. Поэтому на выходе логического элемета ИЛИ 16 будет присутствовать сигнал, который блокирует логические элементы И 10 и 11 по их вторым входам, а на выходе инвертора НЕ 17 будет присутствовать сигнал, который совместно с сигналом с выхода логического элемента ИЛИ 8 возбудит логический элемент И 9. Сигнал с выхода этого логического элемента И 9 пройдет через логический элемент ИЛИ 13 и по шине
5 ПУСК 25 постутшт в блок 4 горизотального перемеше1дая на вход логического элемента ИЛИ 23 (СМ. фиг. 3). Сигнал с выхода логического элемета ИЛИ 23 поступит на вход элемента 24 задержки и через некоторое время, определяемое пocтoя шoй времени этого элемента, постутшт на вход логических элеметов И 19 и 20, один из которых был подготовлен ранее сигналом Больше или Меньше из блока 3 сравнения. Поэтому один из лошчес5ких элементов И 19 и 20 выработает сигнал, который возбудит один иэ элементов 21 или 22 памяти. При этом, один из возбудившихся злементов 21 или 22 памяти по шинам 29 или
30выдаст сигнал Вперед или Назад и
0 автооператор начнет свое горизотальное перемешение. Необходимо заметить, что сигнал с выхода элемента 24 задержки по шине 31 поступит также на вход блока 5 вертикалыюго перемешения, 1Ю поскольку блок 3 сравнения
5 в этот момент выработал один из сигналов Больше или Меньше и не выработал сигнал Равно, то вертикального перемешения не будет.
Как только автооператор достигнет задан0ной позиции и информация, поступаюшая на блок 3 сравнения от регистра 1 адреса и шифратора 2 положения автооператора на линии, станет одинаковой, блок 3 сравне1тя выработает сигнал Равно, который по шине 28 поступит
5 на сбросовые входы элеметов 21 и 22 памяти и сбросит их в исходное состояние. Ранее выданный сигнал Вперед или Назад исчезнет и автооператор остановится на заданной поэи щш. При сбросе одного иэ элеметов 21 или
0 22 памяти в исходное состояние сигнал с инверсного выхода этих злеметов, пройдя логическую схему ИЛИ 23, возбудит элемега 24 задержки и через некоторое время по шине
31поступит в блок 5 вероккального перемеше5ния. Поскольку все это время присутствует
сигнал Равно, выработанный блоком 3 сравнения, то блок 5 вертикального персмешетя начнет отработку вертикального перемещения, по окончании которой он выработае- сзипал,
С
поступающий в регистр 1 адреса. Этот последний сигнал сбросит ранее записанные в региар 1 адреса код заданной позиции, что свидетельствует об окончании отработки транопортного перемещения и, следовательно, о том, что данный автооператор, освободился и готов к получению следуюц1его задания.
2. Опасная зона свободна, а позицня, к которой посылается автооператор, находится в опасной 3ojie. В зтом случае также, как и в предыдущем, сигнал с выхода логического элемента ИЛИ 8 подготовит логические злеменгы И 9 и 10 по их первым входам, а сигнал инвертора НЕ 12 заблокирует логический элемент И 11 по его первому входу. Но в этом случае возбудится один из логических элементов И 15..,15j поскольку в решсгр 1 адреса записан двоичный код позиции, находящейся в опасной зоне, и сигнал от него, пройдя через- логический элемент ИЛИ 16, поступит на вторые входы логаческих элементов И 10 и 11, а также на вход инвертора НЕ 17, сигнал с выхода которого заблокирует логический элеме л: И 9 по его второму входу. Таким образом, логические элеметы И 9 и 10 оказьгеаются заблокированными. Логаческий элемент И 10 возбудится, так как смежный автооператор стоит или перемещается вне опасной зоны и, поскольку, на третий вход этого элемента поступает разрещающий сигнал, с выхода HiraepTopa НЕ 17 блока 7 отгона канала управления смежным автооператором. с выхода логического элемента И 10 через логический элемент И.ПИ 13 по шине ПУСК 25 поступает в блок 4 горизонтального перемещения. Дальнейшая работа устройства аналогична работе устройства в первом случае, начиная с момента появления сигнала на шине ПУСК 25.
Зо Первый автооператор посылается на позицию, которая находится в опасной зоне, но опасная зона занята, вторым автооператором, который уже закончил свою транспортную операцию, что означает, что в регистре 1 адреса канала управления вторым автооператором нет информации. Отсутствие информации в регистре 1 адреса пртводит к трму, что логические элементы И 9 и 19 канала управления смежным автооператором заблокированы по своим первым входам от логического элемента ИЛИ 8, а логический элемент И 11 подгопговлен по его первому входу от инвертора НЕ 12. Кроме этого, поскольку второй автоопера ор свободен, то его штанга находится в крайнем нижнем положении, и датчик 14 нижнего положения возбужден, и, следовательно, от него на четвертый вход логического элемента И II поступает шгнал, также пощ-отавливающий этот логический элемент.
Поскольку второй оператор находится в опасной зоне, то будет возбужден выход одаого из датчиков 18tl..l8j позиций, находящихся в опасной зоне, и, следовательно, возбужден логический злемент ИЛИ 16, сигнал от которого также подготавливает логический элемент И 11 по его третьему входу, а инвертор НЕ 17 не возбужден, и, следовательно, сигнал от него блокирует логический элеменг И 10 блока 7 пуска автооператора в канале управления первым автооператором.
С появлением в регистре 1 адреса канала управления первым автооператором кода позиции, находящейся в опасной зоне, возбудатся логический элемент ИЛИ 8, выход которого подготов логические элементы И 9 и 10, а сигнал от и№ вертора НЕ 12 заблокирует логический элемент И 11 в блоке пуска канала управления первого автооператора. При этом, возбудится выход одного из логических элементов; И 15,i.l5j и выход логического элемента ИЛИ 16, сигнал от которого подготовит логические элементы И 10 и И блока 7 пуска в канале управления гкрвым автооператором и вызовет возбуждение логического элемента И 11 блока 7 пуска в канале управления смежным автооператором, так как он ранее был подготовлен по остальным трем его входам. Сигнал от возбужденного логического элемента И 11 запишет в регистр 1 адреса канала управления смежным автооператором код позиции, к которой должен быть отогнан смежный автооператор. Одновременно с этим сигнал от логического элемента И 11 , пройдя через логический злемент ИЛИ 13, поступит по шине 25 Пуск в блок 4 горизонтального перемещения. После этого смежный автооператор начнет перемещаться за пределы опасной зоны. При этом он сойдет с датчика 18 позиции, находящейся в опасной зоне, и датчик перейдет в невозбужденное состояние, что вызовет исчезновение сигнала на выходе логического элемента ИЛИ 16 и появление сигнала на выходе инвертора НЕ 17 блока 7 отгона в канале управления смежным автооператором, сигнал от которого возбудит логический элемент И 10 блока 6 пуска в канале управления первым автооператором, так как он был ранее подготовлен по двум другим его входам. Сигнал от логического элемента И 10, пройдя через логический элемент ИЛИ 13, поступит в блок 4 горизонтального перемещения канала управления первым автооператором, в котором выработается команда на горизонтальное перемещение первого автооператора в опасную зону.
Таким образом, перемещение первого, оператора в опасную зону происходит только после начала перемещения смежного автооператора из опасной зоны,
4. Первый автооператор посылается на позицию, находящуюся в опасной зоне, но опасная юна занята вторым автооператором, который гще не закончил свою транспортную операцию. «О отачает, что в регистре 1 адреса канала уп равления вторым автооператором имеется инфо мация, и, следовательно, будет возбужден логический элемент ИЛИ 8 и не возбужден инвертор НЕ 12, сигнал от которого блокирует логи ческий элемент И 11 блока 6 пуска в канале управления смежным автооператппом. Поскольку второй автооператор производит свою транспортную операцию в опасной зоне, т будет возбужден либо один из датчиков 18, либо один из логаческих элементов И 15, либо одновременно и этот датчик и этот элемент бло ка 7 отгона в канапе управления смежным- автооператором, и, следовательно, будет возбужден выход логического элемента ИЛИ 16 и не возбужден выход И1шертора НЕ 17, шгнал от которого блокирует логический элемент И 10, блока 6 пуска в канале управления первым автооператором. Логические элементы И 9 и 10 блока 6 пуска в канале управления первым автооператором также оказьшаются заблокированными. Первый из ьшх заблокирован сигнатюм от инвертора НЕ 17 блока отгона канала управления первым автооператором, так как этот инвертор находится в невозбужденном состоянии, а второй - от инвертора НЕ 12, так как этот инвертор также находится в нево жденном состоян 1И. Таким образом, ни один из лопгческих элементов И 9, 10 и 11 блока 6 пуска в канале управления.первым автооператором не возбужден, и следовательно, не передает через логический элемеот ИЛИ 13 по шине Пуск 25 сигнала, который бы вызвал появление команды на горизонтальное перемещение первого автооператора. Поэтому первый автооператор, хотя в регистры 1 адреса канала упрэвле1 ия первым автооператором записан код позиции, не начнет свое перемеще}01е к ней до тех пор, пока второй автооператор не закончит свою транспортную операцию в опасной зоне, т.е. не станет свободным, что приведет к возникновению ситуации, описанной в третьем спучае. 5. Первый автооператор находится в опасной зоне и посьшается на позицию, которая находится вне опасной зоны. В этом случае, как и предыдущих, будет возбужден логический элемент ИЛИ 8 блока пуска в канале управления первым автооператором, сигнап с выхода которого подготовит логические элементы И 9 и 10 по их первым входам, и не будет возбужден инвертор НЕ 12, сигнал с выхода которого заблокирует логический элемент И 11. Поскольку первЬш автооператор находится в опасной зоне, то будет возбужден один из датчиков .lSi позиций, находятцихся в опасной зоне, сигнал с вьгхода которого через логический элеме1а ИЛИ 16 подготовит логигеский элемеет И iO по его второму входу, а ситат от не0о; бужден1ЮГ 10JO инвертора НЕ 17 заблокирует логический эле шт И 9. Поскольку второй автооператор находится вне пределов опасной зоны, то логический элемент И.ПИ 16 блока 7 -отгона в канале управления смежным автооператором будет невозбужден, а, следовательно, инвертор НЕ 17 будет возбужд7Н и сигнал от него поступит на третий вход логического элемента И 10 блока 6 пуска в канале управления первым автооператором. Таким образом, по всем трем входам этого лотческого элемента И 10;имеются сш налы, что вызовет его возбуждение, и слгнал от него через логический элемент ИЛИ 13 поступит в блок 4 горизотапьного перемещения и тот выработает команду на: перемещение первого автооператора. Формула изобретения 1.Устройство для управления автооператорами автоматической линии, содержащее каналы по числу автооператоров, каждый из которых состоит из регистра адреса, шифратора и блока сравнения, причем поразрядные выходы регистра адреса и ншфратора соединены с соответствующими входами блока сравнения, блока горизонтального перемещения автооператора, входы которого соединены с соответствующими выходами блока сравнения, блока вертикального перемещения автооператора, первьй вход которого соединен с соответствующим выходом блока сравнения, второй вход соединен с выходом блока горизонтального перемещетя автооператора, а выход соединен с входом penicjpa адреса, отличающееся тем, что, с целью повышения надежности устройства путем исключения столкновения двух смежных автооператоров, устройство содержит в каждом канале блок пуска автооператора и блок отгона автооператора, поразрядные входы которых соединены с выходами регистра адреса, второй вход блока пуска автооператора соединен с выходом блока отгона автооператора, третий вход блока пуска соединен с вьтходом блока отгона канала управления смежным автооператором, первый выход бло ка пуска автооператора соединен с входом блока горизонтального перемещения автооператора, а второй - с регистром адреса. 2.Устройство по п. 1, отличающееся тем, что блок пуска содержит два логаческих элемента ИЛИ, трт логических элемента И, инвертор и датчик нижнего положения автооператора, причем входы первого элемента ИЛИ соединены с поразрядным входами блока, а первые входы первых двух элементов И и вход инвертора соединены с выходом первого элемента ИЛИ, второй вход первого элемента И, а также вторые входы второго и
третьего длемопов И соединены с вторым входом блока, третьи входы второго и третьего элементов И ооеданены с третшм входом блока, первый и четверть входы третьего элемента И соединены, соответственно, с выходом инвертора и с выходом датчика нижнего положения, выходы элементов И ооедннень с входами второго элемента ИЛИ, выход которого соединен с первым выходом блока, а выход третьего элемшта И соединен также с вторым выходом блока. ,
3. Устройство по П.1, о т л и ч а ю ш ее с я тем, что блок отгона содержит логические элементы И, датски позиций, логичео
кий элемент ИЛИ, инвертор, причем входы элементов И соединены с входом блока, входы элемента ИЛИ соединены с вькодами элементов И,с выходами датчиков позиций, вход инвертора соединен с выходом элемента ИЛИ, а выходы инвертора и элемента ИЛИ соединены с выходом блока.
Источники информации, принятые во внимание при экспертизе:
}. Авторское свидетельство СССР № 368611, М.Кл. G 06 F 15/50.
2. Авторское свидетельство СССР № 367412, MJOr. G 05 В 19/04.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления подъемно-транспортным механизмом | 1978 |
|
SU959037A2 |
| Устройство для программного управления автооператорами гальванической линии | 1979 |
|
SU857935A1 |
| Устройство для управления автоматическими линиями | 1983 |
|
SU1149223A1 |
| Устройство для автоматического управления объектом | 1982 |
|
SU1084741A1 |
| Устройство управления автооператорами автоматических линий гальванопокрытий | 1988 |
|
SU1595952A1 |
| Устройство для управления подъемно-транспортным механизмом | 1974 |
|
SU479087A1 |
| Устройство для программного управления | 1982 |
|
SU1067470A1 |
| Устройство для программного управления | 1982 |
|
SU1057925A1 |
| Ассоциативный параллельный процессор | 1981 |
|
SU1166128A1 |
| Устройство для программного управления автооператором гальванической линии | 1976 |
|
SU636585A1 |
19
21
22
31
23
2
ЭО
