(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПОДЪЕМНОТРАНСПОРТНЫМ МЕХАНИЗМОМ.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления автооператорами автоматической линии | 1976 |
|
SU616610A1 |
| Устройство для управления подъемно-транспортным механизмом | 1974 |
|
SU479087A1 |
| Устройство для автоматического управления объектом | 1982 |
|
SU1084741A1 |
| Устройство для программного управления подъемно-транспортным механизмом | 1982 |
|
SU1048456A1 |
| Устройство программного управления автооператорами многопроцессных автоматических линий гальванопокрытий | 1982 |
|
SU1081243A1 |
| Устройство для программного управления подъемно-транспортным механизмом | 1984 |
|
SU1166063A2 |
| Устройство программного управления автооператорами гальванической линии | 1981 |
|
SU969794A1 |
| Устройство для программного управления | 1982 |
|
SU1067470A1 |
| Устройство для программного управления автооператорами гальванической линии | 1987 |
|
SU1429089A1 |
| Устройство для программного управления | 1982 |
|
SU1057925A1 |
Изобретение относится к автоматике И: может использоваться для управления переметением механизма по горизонтали и вертикали с получением точных конечных положений.
По основному авт.св. № 479087 известно устройство для управления подъемно-транспортным механизмом, содержащее регистр адреса и шифратор, выходы которых подключены к соответствующим входам блока сравнения,б.пок горизонтального перемещения, вход, которого подключен к одному из выходов блока сравнения, а выход - к входу регистра адреса, элемент задержки и элемент ИЛИ входы которого соединены с соответствующими выходами блока горизонтального перемещения, а выход элемента ИЛИ через элемент задержки соединен с дополнительными входами блоков горизонтального и вертикального перемещений {1.
Недостатком известного устройства является отсутствие возможности автоматического осуществления последовательно одно за другим выполняющихся действий по переносу, опусканию и отгону, освободившегося автоопеl dTopa от позиции, длительная стоянКЭ на которой приводит к преждевре-.
менному износу автооператора и снижению производительности линии.
Цель изобретения - уве.ричение надежности устройства.
Указанная цель достигается тем, что в известное устройство введены элемент памяти, элемент И и последовательно соединенные датчики позиций отгона и дополнительный элемент. ИЛИ,
10 выход которого соединен с одним входом элемента И, другие входы которого соединены с выходами блока вертикального перемещения, а выход - с первым входом элемента памяти, второй
15 вход которого подключен к шлходу блока задержки/ первый выход элемента Памяти соединен с вторым входом регистра адреса, а второй выход - с вторым входом блока вертикального перемеще20ния.
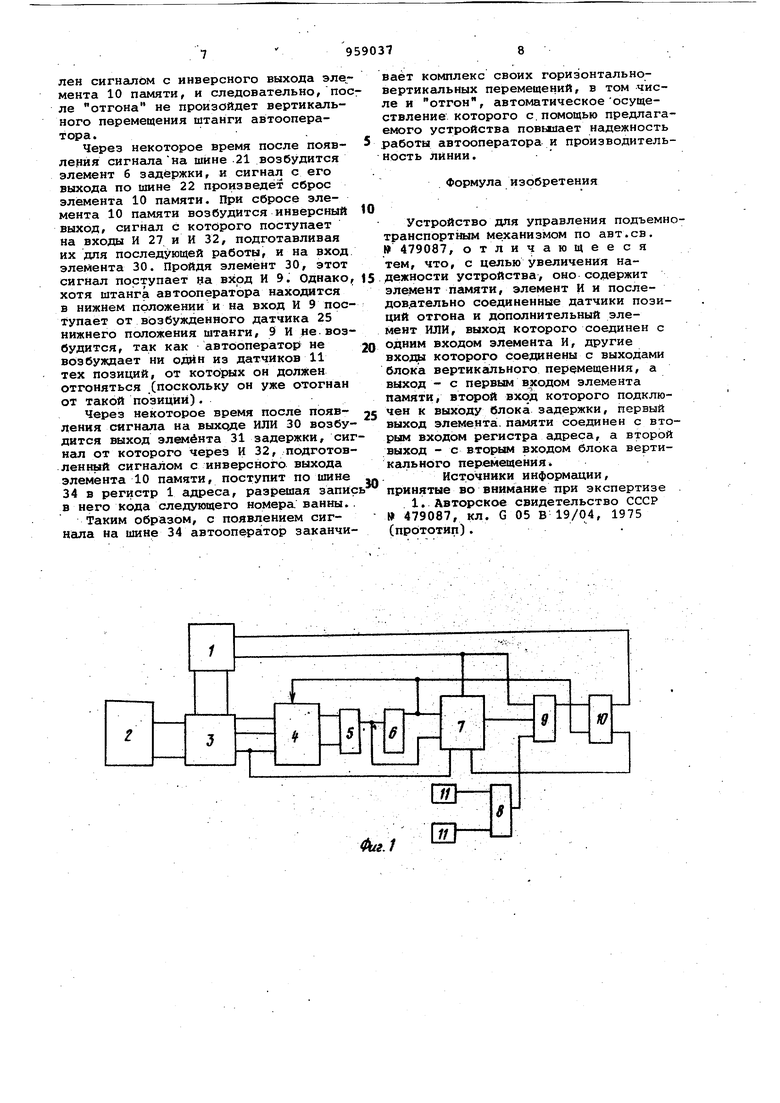
На фиг. 1 представлена структурная схема предлагаемого устройства на фиг. 2 - схема блока горизонтального перемещения; на фиг. 3 - схема блока
25 вертикального перемещения.
Схема устройства содержит регистр адреса 1, шифратор положения автооператора.на линии 2, блок 3 сравнения, блок 4 горизонтального перемещения,
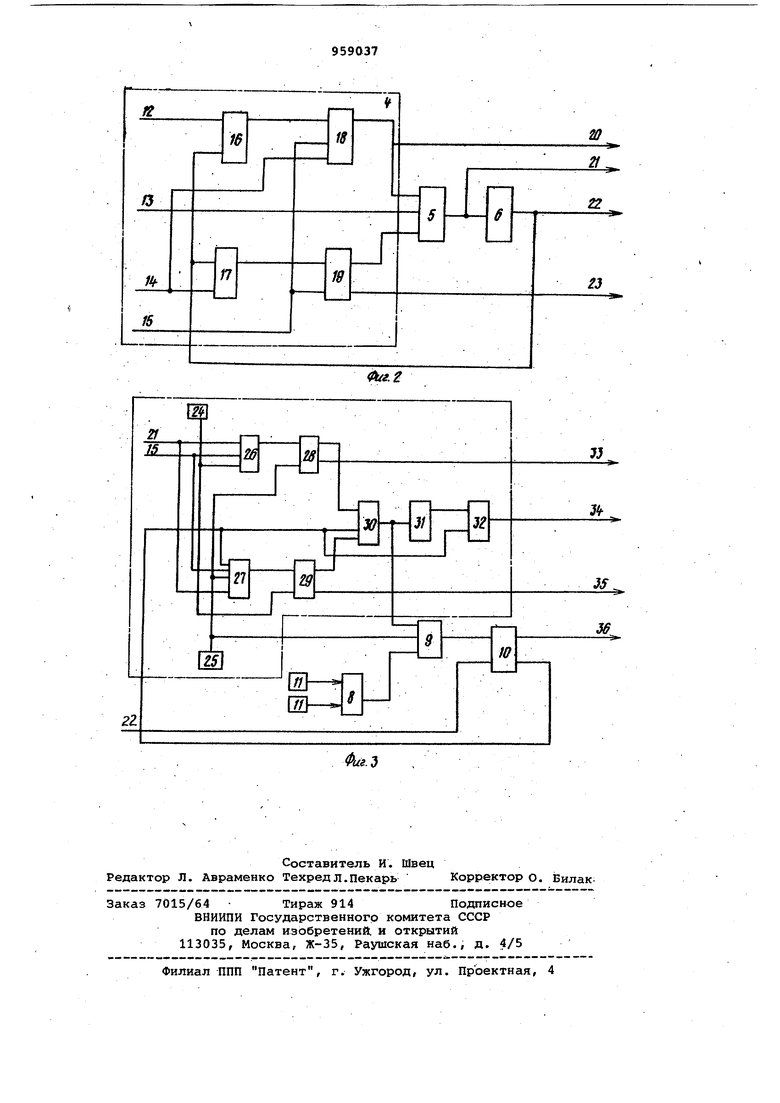
30 элемент ИЛИ 5, элемент. 6 задержки, блок 7 вертикального перемещения, эл мент ИЛИ 8, элемент И 9, элемент 10 памяти, датчик 11 отгона. На фиг. 2 приведена схема блока 4 горизонтального перемещения, где шин сигнала Больше 12, вырабатываемого блоком 3 сравнения, шина Пуск 13, шина сигнала Меньше 14, вырабатываемого блоком 3 сравнения, шина сиг нала Равно 15, вырабатываемого бло ком 3 сравнения, элементы И 16 и 17. элементы 18 и 19 памяти, шина сигнал Вперед 20, шина незадержанного сиг нала окончания горизонтального перемещения 21, шина .задержанного сигнал окончания горизонтального перемещения 22, шина сигнала Назад 23. На фиг. 3 приведена схема блока 7 вертикального перемещения, где датчики 24 и 25 крайних соответственно верхнего и нижнего положений штанги (каретки) автооператора, эле менты И 26 и 27, элементы 28 и 29 памяти, элементы ИЛИ 30, элемент 31 задержки, элемент И 32, шина- 33 сиг нала Вниз, шина 34 сигнала разрешения переписи в регистр 1 адреса следующего кода задаваемой позиции, шина 35 сигнала Вверх, шина 36 пр мого выхода элемента памяти. Регистр адреса 1 предназначен дл хранения в нем двоичного кода позиции, к которой посылается автоопера тор. Шифратор 2 преобразует сигналы, поступакяцие от датчиков положения автооператора на линии, в двоичный параллельный код . . Рассмотрим работу предлагаемого устройства в 3-х случаях. Автооператор должен осуществить подгон к ванне N Где и подъем изделия из этой ванны. Исходное положение - штанга автооператора находится в нижнем положении, а сам автооператор находится на любой поэиции своей зоны, за исключением те позиций, от которых он отгоняется. При записи в регистр 1 адреса двоичного п-раэрядного кода ванны N Где одновременно вырабатывается сигнал Пуск, который, пройдя элемент 5 ИЛИ и элемент 6 задержки, по ступает на первые входы элементов 16 и 17 И, подготавливая их. К этом моменту блок 3 сравнения, сравнивая информацию из регистра 1 адреса и шифратора 2 положения автооператора на линии, вырабатывает один из сигналов Больше или Меньше. Предположим, что выработан сигнгш Больше. Тогда сигнал Больше по шине 12 совместно с сигналом с элем та . 5 задержки возбуждает элемент 16 и включится элемент 18 памяти, с вы хода которого по шине 20 поступает сигнал Вперед на включение силово контактора (фиг. 2). Автооператор начинает перемещаться. Как только автооператор достигает ванны Где, информация, поступающая от шифратора 2 положения автооператора на линии сравнится с информацией регистра 1 адреса, и поэтому блок 3 сравнения выработает сигнал Равно. Этот сигнал по шине 15 поступает в блок 4 горизонтального перемещения на сбросовые входы элементов 18 и 19 памяти и выключает один из элементов памяти, в данном случае 18. Сигнал Вперед, снимается иавтооператор останавливается. При включении элемента 18 памяти на инверсном выходе последнего появляется сигнал, который элемент 5 ИЛИ возбуждает элемент 6 задержки, а также по шине 21 поступает в блок 7 вертикального перемещения. Сигнал с выхода элемента 6 задержки поступает на вторые входы 16 и 17 для осуществления точного останова автооператора на заданной позиции,а также по шине 22 поступает на сбросовый вход элемента 10 памяти. Появление сигнала на шине 21 свидетельствует об окончании горизонтального перемещения и служит началом к по.следующему вертикальному перемещению. Сигнал по шине 21 поступает на вторые входы элементов И 26 и 27, на первые входы которых подан сигнал Равно по шине 15. Поскольку штанга автооператора находится в крайнем нижнем положении, то возбуждается датчик 25 нижнего положения штанги. Сигнал от этого датчика поступает на третий вход элемента 27. На четвертый вход элемента 27 поступает сигнал с инверсного выхода .элемента 10 памяти. Таким образом, на входе И 27 происходит совпадение четырех сигналов.Происходит срабатывание данной схемы и включается элемент 29 памяти, с выхода которого по шине 35 поступает сигнал Вверх на включение силового контактора. Штанга автооператора начнет перемещение вверх. Как только штанга достигнет верхнего положения, возбуждается датчик 24 верхнего положения. Сигнал от этого датчика поступает на сбросовый вход элемента 28 памяти и выключает его, а также поступает на один из входов элемента 26. При сбросе элемента 29 памяти снимается сигнал Вверх с шины 35, и штанга автоопёратора перестанет перемещаться .вверх. При этом на инверсном выходе элемента 29 памяти появляется сигнал, который через элемент 30 ИЛИ возбуждает элемент 31 задержки и поступает на первый вход элемент 9 И. Элемент И 9 не .среагирует на поступление на ее вход сигнала с элемента ИЛИ 30, поскольку в данный момент штанга автооператора находится в верхнем по ложении. Сигнал с выхода элемента 31 задержки через И 32, подготовленную по второму входу инверсным выходом элемента 10 памяти, поступает по шине 34 в регистр 1 адреса, разрешая запись в него кода следующего номера ванны. Автооператор должен осуществить перенос и последующее опускание изделия в ванну N Куда. При этом ванна N Куда не является той ванно от которой он должен отгоняться. Исходное положение - штанга автооператора находится в крайнем верхне положении, а сам автооператор находи ся на любой позиции своей зоны. Работу устройства рассмотрим, начиная .с момента появления сигнала на шине 22, так как работа .устройств до этого момента аналогична работе устройства в 1-ом случае. Появление сигнала на шине 18 проводится к появлению сигнала на шине 40 инверсного выхода элемента 38 памяти; Сигнал на шине 22 появляется через некоторое время после появления сигнала на шине 21, который пост пает на входы элементов Н26 и 27. Поскольку в рассматриваемом случае штанга автооператора находится в верхнем положении, то сигнал от воз.бунзденного датчика 24 верхнего положения штанги совместно с сигналом Равно на шине 15 уже подготовили элемент И 26 к ее возбуждению от появления сигнала на шине 21. Сигнал с выхода элемента И 26 включает элемент 28 памяти, крторый по шине 33 подает на исполнительные механизмы сигн.ал Вниз. Штанга автооператора начинает перемещаться вниз и, как только она достигнет своего крайнего нижнего положения, возбуждается датчик 25 нижнего положения. Сигнал этого датчика поступает на сбросовый вход элемента 28 па мяти и включает последний. При этом сигнал Вниз на шине 3 исчезнет, и штанга перестает перемещаться вниз. Сигнал от датчика 25 нижнего положения поступает также на второй вход элемента И 9, подготавливая ее При сбросе элемента 28 яамяти на его инверсном выходе появится сигнал, который через ИЛИ 30 поступает на первый вход И 9, а также возбуждает элемент 31 задержки. Элемент И 9 не среагирует на поступление на ее вход сигнгша с вЫхода ИЛИ 30, поскольку в данный момент автооператор находится у ванны, от которой он не должен отгоняться. Поскольку не возбужден ни один из датчиков 11 позиций отгона, не будет возбужден выход элемента ИЛИ 8 и И 9 Следовательно, элемент 10 памяти остается в сброшенном состоянии, а его инверсный выход остается возбужденным . Через некоторое время после появления сигнала на выходе элемента 30 возбуждается выход элемента 31 задержки, сигнал от которого через И 32, подготовленную сигналом с инверсного выхода элемента 10 памяти, поступает по шине 34 в регистр 1 адреса, разрешая запись в него кода следующего номера ванны. Автооператор также, как и во .втором случае должен осуществить Перенос и последующее опускание изделия в ванну N Куда, но при этом ванна N Куда является той ванной, от которой автооп.ератор должен отгоняться. Исходное положение автооператора такое же, как и во втором случае. Работу устройства рассмотрим, начиная с момента появления сигнала на выходе логической схемы 30 ИЛИ, так как работа устройства до этого момента аналогична работе устройства во втором случае. Необходимо отметить, что к этому моменту штанга автооператора находится, в нижнем положении, и сигнал от возбужденного датчика 25 нижнего положения поступает на второй вход И 9. На третий вход эТой схемы поступает сигнал от элемента 8, так как автооператор в данный момент находится на одной из позиций, от которой он должен отгоняться и, следовательно, возбужден один из датчиков 11. Таким образом, появление сигнала на выходе ИЛИ 30 приводит к возбуждению элемента 9 , так как на ее входе произойдет совпадение всех трех ее входных сигналов. Возбуждение И 9 приводит .к возбуждению шины 36 прямого выхода элемента 10 памяти и к пропаданию сигнала на инверсном выходе элемента 10 памяти. СИгНсШ по шине 36 поступает в регистр 1 адреса, записывая в него номер ванны .отгона - NQJP Через некоторое время после появления сигнала на выходе ИЛИ 30 возбуждается сигнал на выходе элемента 31 задержки, который поступает на вход И 32. Однако выход этой схемы не возбуждается,так как в данный момент не возбужден инверсный выход элемента 10 памяти. После записи в регистр 1 адреса номера N(j устройство до момента появления сигнала на шине 21 работает также как и в 1-ом случае. Таким образом, к моменту, появления сигнала на шине 21 автооператор находится на позиции NOT-P. Сигнал на шине 21 не возбуждает ни одного из элементов И 26 и 27, так как первый из них не подготовлен сигналом от датчика 24 верхнего положения, а второй не подготовлен сигналом с инверсного выхода эле мента 10 Пс1мяти, и следовательно, по ле отгона не произойдет вертикального перемещения штанги автооператора.. Через некоторое время после появления сигналана шине 21 возбудится элемент б задержки, и сигнал с его выхода по шине 22 произведет сброс элемента 10 памяти. При сбросе элемента 10 памяти возбудится инверсный выход, сигнал с которого поступает на входы И 27 и И 32, подготавливая их для последующей работы, и на вход элемента 30. Пройдя элемент 30, этот сигнал поступает на вход И 9. Однако хотя штанга автооператора находится в нижнем положении и на вход И 9 поступает от возбужденного датчика 25 нижнего положения штанги, 9 И не возбудится, так как автооператор не возбуждает ни один из датчиков 11 тех позиций, от кото;рых он должен отгоняться (поскольку он уже отогнан от такой позиций). Через некоторое время после появления сягнсша на выходе ИЛИ 30 возбудится выход элемента 31 задержки, сиг нал от которого через И 32, подготовленный сигналом с инверсного выхода элемента 10 памяти, поступит по шине 34 в регистр 1 адреса, разрешая запис в него кода следующего номера, ванны. Таким образом, с появлением сигнала на шине 34 автооператор заканчивает комплекс своих горизонтальновертикальных перемещений, в том числе и отгон, автоматическоеосуществление которого с. помощью предлагаемого устройства повышает надежность работы автооператора и производительность линии. Формула изобретения Устройство для управления подъемнотранспортным механизмом по авт.св. 479087, отличающееся тем, что, с целью увеличения надежности устройства, оно содержит элемент памяти, элемент И и последовдтельно соединенные датчики позиций отгона и дополнительный элемент ИЛИ, выход которого соединен с одним входом элемента И, другие входы которого Соединены с выходами блока вертикального перемещения, а выход - с первым вводом элемента памяти, второй вход которого подключен к выходу блока задержки, первый выход элемента, памяти соединен с вторым входом регистра адреса, а второй выход - с вторым входом блока вертикального перемещения 4 Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР 479087, кл. G 05 В 19/04, 1975 (прототип).
15
W
т
11
W
-Ц
w
Ji
Jf
J/
35
36
10
21
