1 Изобретение относится к автоматике и может быть использовано для управления перемещением транспортного механизма по горизонтали и вертикали в автоматическом режиме по заданной программе.. .
Целью изобретения является повьше ние надежности устройства.
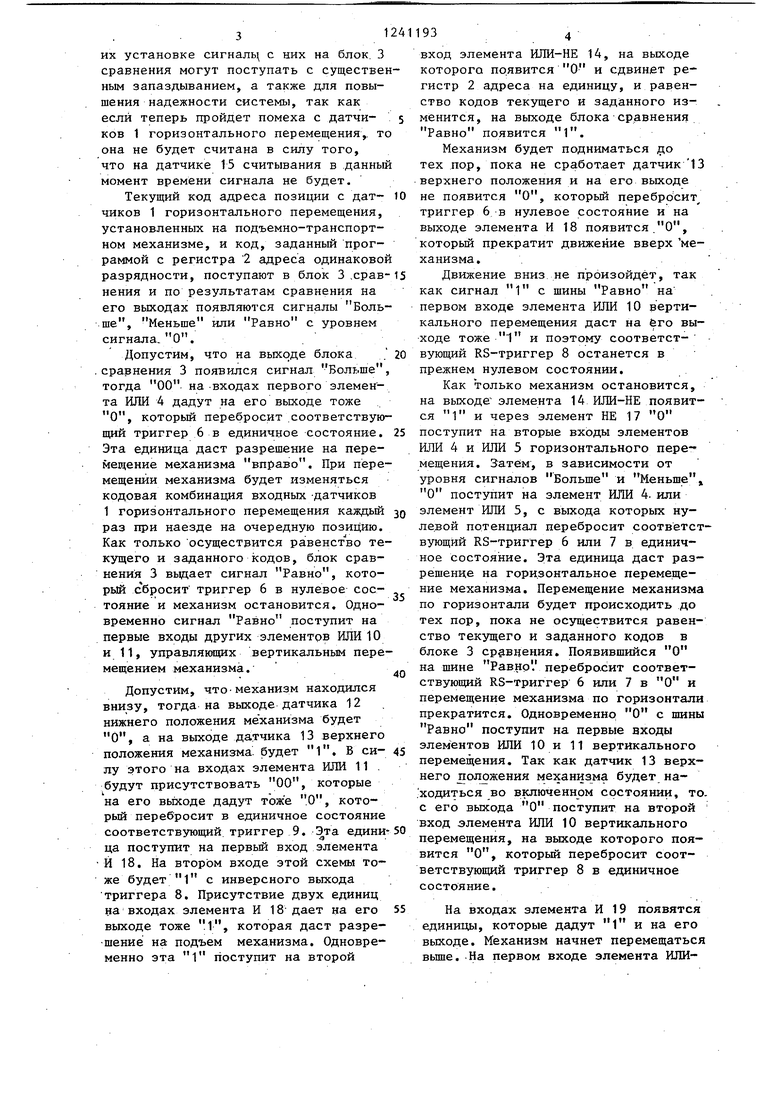
На фиг. 1 представлена функциональная схема устройства на фиг.2 - блок памятиJ на фиг. 3 - временные диаграммы -работы устройс тва.
Устройство для управления подъемно-транспортным механизмом (фиг.1) содержит датчики 1 горизонтального перемещения, регистр 2 адреса, выход которого подсоединены к входам -блока 3 сравнения, выходы Больше, Меньше которого подсоединены к первым входам элементов ИЛИ 4, 5 горизон- тального перемещения,, первый и второй RS-триггеры 6 и 7 горизонтальн® го перемещения, третий и четвертьй RS-триггеры 8 и 9 вертикального перемещения, элементы ИЛИ 10, 11, датчи- ки 12, 13 вертикального перемещения, элемент ИЛИ-НЕ 14, датчик 15 считыва л
ния, соединенный с первым вх одом блока 16 памяти, элемент НЕ 17, элементы И 18, 19..
На фиг. 2 блок 16 памяти содержит группу элементов И-НЕ 20i-20n, формирователь 21 импульса и группу КЗ- триггеров 22-22..
Блок памяти 16 предназначен для того, чтобы сигналы датчиков 1 горизонтального перемещения, моменты времени появления которых могут несколько отличаться, поступили на схему 3 сравнения одновременно.
Устройство работает следующим образом.
После запуска устройства все RS- триггерь (6, 7, 8, 9) устанавливаются в О (по шине Сброс), а ре- гистр 2 адреса - в начальное положение, которому, на его выходе, соответствует адрес первого номера команды.
При установке начального положения, на выходе элемента Ш1И.-НЕ 14 бу- дет присутствовать лог. 1, которая оставит регистр 2 адреса без изменения, так как он сдвинется только при появлении на выходе элемента ИЛИ- НЕ 14 лог. О. Сдвиг регистра 2 ад- реса после установки начального положения произойдет лишь в том если адрес в первой ячейке регистра
5
0
5 0. 5
0
° 5
0
193I
2 адреса совпа дет с адресом (кодом) местоположения подъемно-транспортного механизма и на шине Равно появится лог. О, который дает разре- шение подъемно-транспортному механизму на вертикальное перемещение. Б силу этого, на выходе элемента ИЛИ- НЕ 14 появится лог. О, которьш сдвинет регистр 2 адреса.
Блок 16 п.амяти работает следующим, образом. После пуска системы сформи- ро ванный формирователем 21 импульса отрицательный импульс устанавливает RS-триггеры в нулевое состояние. При появлении сигнала лог. 1 с датчика 15.считывания элементы И-НЕ открываются и соответствующая текущему коду с датчиков. 1 горизонтального.перемещения информация , инвертируясь, поступает на . Соответствующие входы триггеров 22 - 22fj. Одновременно-Лог. 1 с датчика 15 считывания поступает на вход фор-, мирователя 21 импульса, на выходе которого появляется отрицательный импульс длительностью 10 мкс.(фиг.З). i Этот импульс устанавливает нулевые состояния те RS-триггеры , на S-входах которых остались лог. 1 (сигнал с соответствующего датчика 1 горизонтального перемещения отсутствует) , после его исчезновения (через to мкс) те RS-триггеры, на S-входах которых, присутствуют лог. . О, надежно устанавливаются в единичные состояния (на их выходах - лог. 1).
Так как частота срабатывания ис- ,полнительных органов подъемно-транспортного механизма много меньше частоты срабатьюания триггеров, то возможная задержка появления истинной информации на выходах триггеров .Ha 10. МКС не играет никакой роли, тем. более, что практика показала, что задержки нет вообще (лишь на время срабатываяия триггера), так. как При подаче одновременно двух лог. на R- и Si-входы RS-триггера на выходах Q и Q его появляются обе лог. 1 и сохраняются, пока р R-входа не будет убран лог. О, тогда на его инверсном выходе о появляется сразу же лог. О.
Датчик 15 считывания предназначен для достоверности считьщания информации со всех датчиков 1 горизонтального перемещения, так как при любой
О
31
их установке сигналц с них на блок. 3 сравнения могут поступать с существенным запаздыванием, а также для повышения надежности системы, так как если теперь пройдет помеха с датчи- ков 1 горизонтального перемещения,, то она не будет считана в силу того, что на датчике 15 считывания в данный момент времени сигнала не будет,
Текущий код адреса позиции с дат- чиков 1 горизонтального перемещения, установленных на подъемно-транспортном механизме, и код, заданный программой с регистра 2 адреса одинаковой разрядности, поступают в блок 3 .сравнения и по результатам сравнения на его выходах появляются сигналы Больше, Меньше или Равно с уровнем сигнала. О.
Допустим, что на выходе блока . сравнения 3 появился сигнал Больше, тогда 00 на-входах первого элемента ИЖ 4 дадут на его выходе тоже О, который перебросит .соответствующий триггер 6 в единичное состояние. Эта единица даст разрешение на перемещение механизма вправо. При перемещении механизма будет изменяться кодовая комбинация входных -датчиков 1 горизонтального перемещения каждый раз при наезде на очередную позицию. Как только осуществится равенство текущего и заданного кодов, блок сравнения 3 выдает сигнал Равно, который сбросит триггер 6 в нулевое состояние и механизм остановится. Одновременно сигнал Равно поступит на первые входы других элементов ИЛИ 10 и 11, управляющих вертикальным пере
мещением механизма.
Допустим, что-механизм находился внизу, тогда на выходе датчика 12 нижнего положения механизма будет О, а на выходе да,.тчика 13 верхнего положения механизма, будет 1. В си- лу этого на входах элемента ИЛИ 11 . будут присутствовать 00, которые на его вьгходе дадут тоже .О, который перебросит в единичное состояние соответствующий, триггер 9. Эта едини ца поступит на первьй вход элемента И 18. На втором входе этой схемы тоже будет 1 с инверсного выхода триггера 8. Присутствие двух единиц на входах элемента И 18-дает на его выходе тоже .1, которая даст разре- шение на подъем механизма. Одновременно эта 1 поступит на второй
4
j
10 15
20 25 о
5
0
5 0 5
вход элемента ИЛИ-НЕ 14, на выходе которого по.явится О и сдвинет регистр 2 адреса на единицу, и равенство кодов текущего и заданного изменится, на выходе блока сравнения Равно появится 1.
Механизм будет подниматься до тех по.р, пока не сработает датчик 13 верхнего положения и на его выходе не появится О, который перебрр сит триггер 6 в нулевое состояние и на выходе элемента И 18 появится .О, который прекратит движение вверх механизма. .
Движение вниз не произойдёт, так как сигнал 1 с шины Равно на первом входе элемента ИЛИ 10 вертикального перемещения даст на его выходе тоже 1 и поэтому соответствующий RS-триггер 8 останется в прежнем нулевом состоянии.
Как только механизм остановится, на выходе элемента 14 ИЛИ-НЕ появится 1 и через элемент НЕ 17 О поступит на вторые входы элементов ИЛИ 4 и ИЛИ 5 горизонтального пере- мещения. Затем, в зависимости от уровня сигналов Больше и Меньше О поступит на элемент ИЛИ 4- или элемент ИЛИ 5, с выхода которых ну- ле.вой потенциал перебросит соответствующий RS-триггер 6 или 7 в единичное состояние. Эта единица даст разрешение на гори.зонтальное перемещение механизма. Перемещение механизма по горизонтали будет происходить до тех пор, пока не осуществится равенство текущего и заданного кодов в блоке 3 сравнения. Появившийся О на шине Равно . перебро-сит соответствующий RS-триггер 6 или 7 в О и перемещение механизма по горизонтали прекратится. Одновременно О с шины Равно поступит на первые входы элементов ИЛИ 10 и 11 вертикального перемещения. Так как датчик 13 верхнего положения механизма будет на- . ходиться во включенном состоянии, то. с его выхода О поступит на второй вход элемента ИЛИ 10 вертикального перемещения, на выходе которого появится О, который перебросит соответствующий триггер 8 в единичное состояние.
На входах элемента И 19 появятся единицы, которые дадут 1 и на его выходе. Механизм начнет перемещаться вьш1е. На первом входе элемента ИЛИНЕ 14 появится 1, и поэтому на выходе, этой схемы появится О, который сдвинет регистр 2 адреса на единицу и равенств.о кодов текущего и заданного изменится, и на шине Равно с блока сравнения появится 1. Движение механизма вниз будет продолжаться до, тех пор, пока не /сработает датчик 12 нижнего положения и на его выходе не появится О, которьй перебросит триггер 8 в нулевое состояние и на выходе элемента И 19 появится О, который прекратит движение вниз механизма. . .
Движение вверх не произойдет, так как сигнал 1 с шины Равно на первом входе элемента ИЛИ 11 вертикального перемещения даст на его выходе тоже 1, и поэтому соответствукиций триггер 9 останется в прежнем нулевом состоянии.
Далее, оставив тару с деталями, механизм начнет горизонтальное пере- мещение и будет перемещаться до тех пор, пока вновь не наступит равенство текущего и заданного кодов, и блок -сравнения 3 вьща,ст О на шине
Равно.
Формула изобретения
Устройство для управления подъемно-транспортным механизмом, содержа- щее два элемента И, датчики горизонтального перемещения, регистр адреса, соединенный выходами с первыми входами блока сравнения, первый выход которого соединен с RS-входами первого и второго RS-триггеров, выходы которых подключены к выходам устройства для управления подъемно-транспортным механизмом, а входы сброса зЮ 15
0
5
0
к первому входу регистра адреса,, к выходу сброса третьего и четвертого КЗ-триггеров и к входу сброса устройства для управления подъемно-транспортным механизмом, первый и второй датчики вертикального перемещения, выходы которых соединены.соответственно с R -входом четвертого и тре ть- его -триггеров и через первый и второй элементы ИЛИ - соответственно с S-входами третьего и четвертого .8-триггеров,. о т л и ч а ю.щ е е с я тем, что, с целью повьпиения надежности, в. него введены датчик считывания, блок памяти, элемент ИЛИ-НЕ, элемент НЕ и третий и четвертый элементы ИЛИ, выходы которых соединены с S -входами соответственно первого и второго RS -триггеров, первые входы третьего и четвертого элементов ИЖ подключены соответственно к второму и третьему выходам блока сравнения, вторые входы - через элемент НЕ к входу сдвига регистра адреса и к входу элемента ИЛИ-НЕ, входы которого соединены с вторыми выходами устройства для управления подъемно- транспортным механизмом, с выходами первого и второго элементов И, первые входы которых подключены к пря- мым выходам соответственно третьего и четвертого RS-триггеров, а вторые входы - к инверсным выходам соответственно четвертого и третьего И, $-триггеров, выход датчика считывания соединен с первым входом блока памяти, .вторые входы которого соединены с выходами датчиков горизонталь- ного перемещения, а выходы - с вторыми входами регистра адреса, первый выход блока сравнения соединен с вторыми входами первого и второго элементов ИЛИ..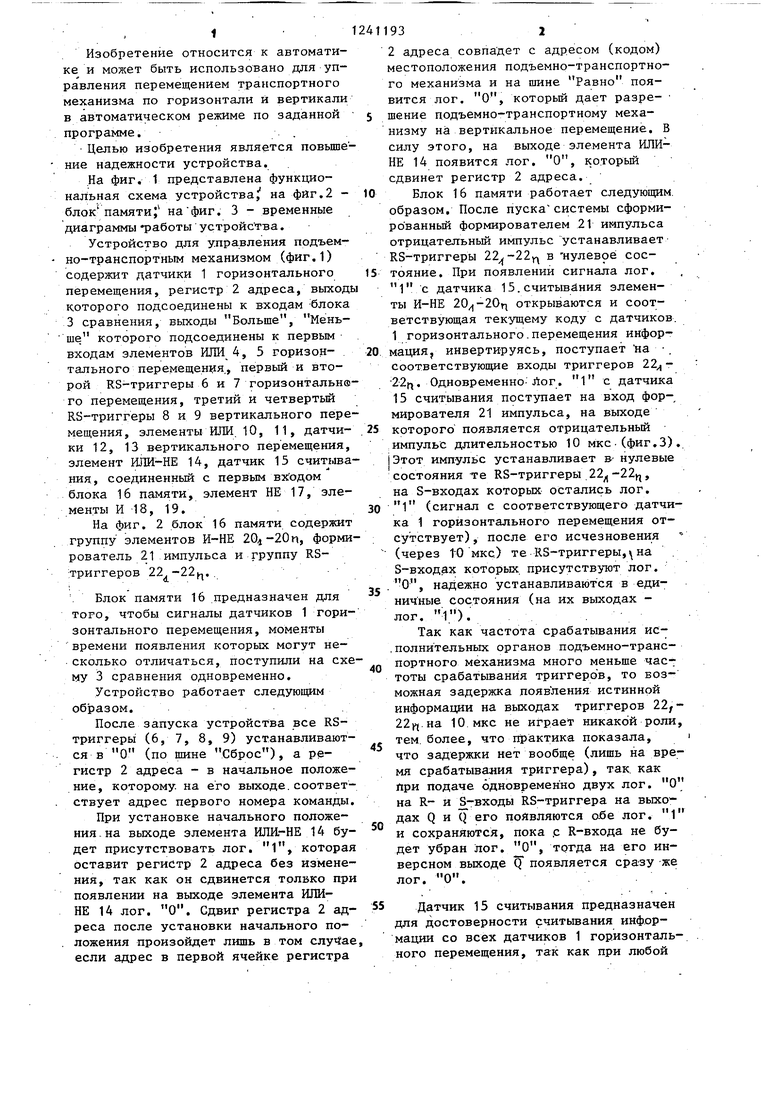
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления подъемно-транспортным механизмом | 1982 |
|
SU1048456A1 |
| Устройство для программного управления подъемно-транспортным механизмом | 1984 |
|
SU1166063A2 |
| Устройство для программного управления транспортным механизмом | 1983 |
|
SU1198459A1 |
| Устройство для управления движением транспортного средства | 1989 |
|
SU1735809A2 |
| Последовательное буферное запоминающее устройство | 1986 |
|
SU1332383A1 |
| Многоканальное устройство тестового контроля логических узлов | 1990 |
|
SU1837295A1 |
| Устройство для контроля ускорения транспортного средства | 1990 |
|
SU1832086A1 |
| Электронный музыкальный звонок | 1988 |
|
SU1748176A1 |
| Устройство для кодирования | 1985 |
|
SU1287294A1 |
| Устройство управления сортировкой лесоматериалов | 1990 |
|
SU1794501A1 |
Изобретение относится к автома- .тике и может быть использовано.для управления перемещением транспортного механизма по горизонтали и вертикали в автоматическом режиме по заданной прЪграмме. Целью изобретения является повышение надежности устройства.. . Устройство для управления подъемно- транспортным механизмом содержит датчики горизонтального перемещения, в.ертикального перемещения, регистр адреса, блок сравнения, четьгре КЗ- триггера, датчик считывания, элементы ИЛИ и. ИЛИ-НЕ, блок памяти, элементы И и НЕ . 3 ил . . . IND 4 UD 00
L/S.2
Редактор М.Бандура Заказ 3487/42
Составитель И.Швец Техред Л.Олейник
Корректор Е.Рошко
Тираж 836Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб,, д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Корректор Е.Рошко
| УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ ПЕРЕМЕЩЕНИЕМ ТРАНСПОРТИРУЮЩЕЙ УСТАНОВКИ | 0 |
|
SU330446A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для управления подъемно-транспортным механизмом | 1974 |
|
SU479087A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
