(54) УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ АВТООПЕРАТОРАМИ ГАЛЬВАНИЧЕСКОЙ ЛИНИИ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления автооператором гальванической линии | 1976 |
|
SU636585A1 |
| Устройство для управления автооператорами гальванических линий | 1986 |
|
SU1327061A1 |
| Устройство для автоматического управления объектом | 1982 |
|
SU1084741A1 |
| Устройство для управления автоматическими линиями | 1983 |
|
SU1149223A1 |
| Логическое запоминающее устройство | 1986 |
|
SU1316047A1 |
| Устройство для программного управления | 1982 |
|
SU1057925A1 |
| Устройство для программного управления | 1982 |
|
SU1067470A1 |
| Устройство программного управления автооператорами многопроцессных автоматических линий гальванопокрытий | 1982 |
|
SU1081243A1 |
| Устройство для программного управления | 1981 |
|
SU1029145A1 |
| Устройство для программного управления автоматическими линиями гальванопокрытий | 1981 |
|
SU1003023A1 |
Изобретение относится к регулирующим и управляющим системам, а именно к системам программного управления, и может быть использовано для управления автооператорами гальванических или лакокрасочных линий.
Известно устройство для программного управления атроператорами гальванической линии, содержащее коммутатор адресования загрузки ванн, блок времени, блоки управления горизонтальным и вертикальным перемещениями автооператора, блок сравнения, блок датчиков перемещений автооператора. Входы блоков управления горизонтальным и вертикальным перемещениями автооператоров соединены с выходами блока времени, а выходы - с входами блоков исполнительных механизмов автооператоров l.
Работа устройства начинается с отработки вертикального перемещения автооператора по сигналу с блока времени. Затем по сигналу от блока управления вертикальным перемещением автооператора происходит запись адреса в регистр адреса. Этот адрес сравнивается в блоке сравнения с текущей позицией автооператора, определяемой по датчикам, фиксирующим его положение. В результате блок срав 1ения выдает тот или иной сигнал в блок управления горизонтальным перемещением для движения автооператора вперед назад. Автооператор переместится на заданную позицию, на которой осуществляет требуемые по программе действия. При управлении
10 автооператором устройство обеспечивает ритмичность выдачи изделий высокого качества и позволяет контролировать работу линии во времени.
Наиболее близким к предлагаемому
15 является устройство для управления автооператорами автоматической линии, состоящее из кангшов управления по числу автооператоров каждый из которых содержит регистр аццреса и
20 шифратор положения автооператора на линии,подсоединенный выходами к входам блока сравнения, выходы которого подсоединены к входам блока горизонтгшьного перемещение;. Выход блока
25 горизонтгшьного перемещения подсоединен к входу блока вертикального перемещения, другой вход которого соединен с соответствующие выходом блока сравнения. Выход блока верти)0 кального перемещения соединен с входом регистра адреса, выходы которого подсоединены также к блоку пуска автооператора и блоку отгона автооператора. Второй вход блока пуска автооператора соединен с выходом блока отгона автооператора. Третий вход . пуска автооператора соединен с выходом блока отгона канала управления смежным автоопёратором. Первый выход блока пуска автооператора соединен с входом блока горизонтального перемещения, а второй - с регистром адреса fZ 1
К недостаткам известных устройств относятся низкая производительность линии в связи со значительными врецфенамн простоев автооператоров в цикле, обусловленных независимостью их работы и ожиданием одного автооператора окончания функционирования другого автооператора в зоне их совместной работы, а также неэффективным использованием управляющего оборудования в связи с применением двух идентичных устройств управления для двух автооператоров и вытекающими отсюда низкими значениями коэффициентов занятости отдельных блоков устройства.
Цель изобретения - расширение функциональных возможностей устройства.
Указанная цель достигается тем, что в устройство для программного управления автооператорами гальванической линии, содержащее последовательно соединенные регистр адреса, блок сравнения, блок управления горизонтальным перемещением автооператоров и первый дополнительный механизм первог-о автооператора, вторым входом соединенный с первиал выходом блока управления вертикальным перемещением автооператоров, второй выход которого соединен с первым входом второго исполнительного механизма второго автооператора,первый вход блока управления вертикального перемещения автооператоров соединен с первым выходом блока времени, вторым выходом соединенный с вторым входом блока управления горизонтальным перемещением автооператоров, второй выход которого подключен к второму входу второго исполнительного Механизма второго автооператора, и датчики положения первого и второго автооператоров, выхода1 и соединенные со вторым и третьим в: одами блока сравнения, введен логический блок, первым и вторым выходом соединенный с входами датчиков положения первого и второго автооператоров , третьим выходом подключенный к второму входу блока управления горизонтальным перемещением автооператоров г третий выход которого соединен с первым входом логического блока, соединенного
вторым входом с третьим выходом блока управления вертикальным перемещением автооператоров, второй вход которого подключен к четвертому выходу логического блока, пятым выходом соединенного с регистром адреса, а шестым выходом - с входом блока времени, причем логический блок содержи формирователь импульсов, три группы усилителей, управляющий триггер, элемент И, кнопку, первый дешифратор и последовательно соединенные генератор импульсов, третий элемент. И, четвертый элемент И, первый регистр, второй регистр, второй дешифратор, запоминающий элемент, усилитель считывания и пятый элемент и, выходом соединенный с четвертым выходом логического блока, вторым входом - с первым выходом управляющего триггера, второй выход которого подключен к входам усилителей первой группы и первому входу второг Элемента И, а выходы усилителей первой группы соединены с первым, вторым и третьим выходами логического блока, вход управляющего триггера подключен к второму выходу генератор импульсов, третьим вьрсодом соединенного через первый элемент И с первыми входами усилителей второй и третьей групп и вто1Я:а«1 входом усилителя считывания, выход которого подклю чен к второму входу второго элемента И, первый и второй входам логического блока через последовательно соединенные элементы ИЛИ, третий элемент И и формирователь импульсов соединены с вторым входом второго дешифратора, второй вход запоминакнцего элемента через первый дешифратор подключен к вторым выходам первого Е егистра, вторые выхода запоминающего элемента соединены через третью группу усилителей к пятому выходу логическо го блока, а третьи выходы - через вторую группу усилителей к шестым выход 1м логического блока, четвертый выход генератора импульсов через кнопку соединен с вторьм входом четвертого элемента И.
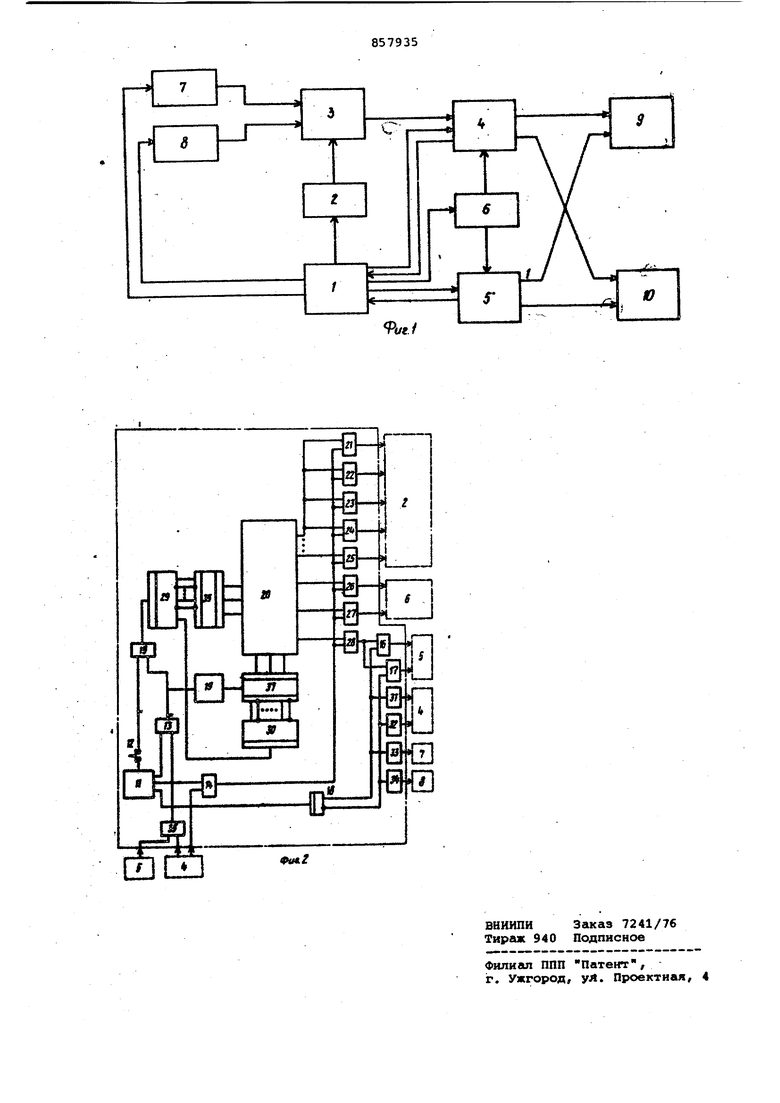
На фиг. 1 представлена блок-схема предлагаемого устройства; на фиг.2 схема логического блока.
Устройство содержит логический блок 1, регистр 2 адреса, блок 3 сравнения, блок 4 управления горизонтальным перемещением автооператоров, блок 5 управления вертикальным перемещением автооператоров, блок б времени, датчик 7 положения первого автооператора, датчик 8 положения второго автооператора, первы исполнительный механизм 9 первого автооператора, второй исполнительный механизм 10 второго автооператора. Логический блок содержит генератор 11 импульсов, кнопку 12, третий 13, первый 14, четвертый 15, пятый 16,
второй 17 элементы И, управляющий триггер 18, формирователь 19 импуль сов, запоминающий элемент 20, усилители 21-25 второй -группы, усилители 26 и27 третьей группы, усилитель 28 считывания, первый 29, второй 30 регистры, усилители 31-34 первой группы/ элемент ИЛИ 35, первый 36, второй 37 дешифраторы, i Устройство работает следующим юбразом.
Перед началом работы логический блок 1 настраивают на управление двумя автооператорами.
работы гальванической линии по циклограмме предшествует эта установки автооператоров в исходное состояние, который автоматически выполняется после запуска устройства в работу. Затем осуществляеся потактовое выполнение программы совместного функционирования двух взаимодействукидих автооператоров.
В первом такте одновременно происходит перемещение первого автооператора по горизонтали на заданную циклограммой позицию и перемещение консоли второго автооператора по вертикали вверх или вниз, во втором такте - наоборот - по горизонтали перемещается второй автооператор, а по вертикали - консоль первого автооператора. Затем выполняется третий такт и таким образом, циклически выполняется вся программа. Длительность такта переменная. Кроме того, устройством предусмотрено вы.полнение удлиненного такта, при котором для некоторых критических операций осуществляется опускание повески с детгшями в ванну, кратковременная выдержка времени пребывания деталей в ванне и подъем консоли вверх за время одного такта. Устройство позволяет выполнять такты с отсутствием горизонтального или вертикального перемещений для одного из автооператоров в зависимости от ра боты блока 6 времени с целью выполнения в(ддержки времени нахождения детгшей в ванне и получения згщанного качества покрытия.
Выполнение такта программы начинается с выдачи логическим блоком 1 адреса, заданного первому автооператору, и записи кода этого адреса в регистр 2. Блок 1 также выдает серию тактовых импульсов, один из которых предназначен для кратковремеиного подключения блока 8 датчиков второго автооператора к блоку 3 сравнения с целью анализа ситуации для исключения столкновения двух автооператоров. Остальные импульсы серии служат для подключения блока 4 .к блоку 9, а также блока 5 к блоку 10, а затем подключают датчик 7 к блоку 3 сравнения. Блок 1 сигналом управления опрашивает датчик 7 положенин блока и код текущего положения .автооператрра поступает в блок 3 сравнения. Кроме этого, регистр 2 адреса передает на блок 3 сравнения код заданного положения автооператора.
В зависимости от знака результата сравнения кодов в блоке 3 сравнения срабатывает либо триггер больше при знаке (+), либо триггер меньше при знаке -) , либо триггер равно
0 при результате сравнения равном нулю. Эти сигналы определяют направление движения первого автооператора и подаются на блок 4, который выдает сигнал включения блока 9. Одновре5менно с этим блок 1 выдает сигналы на блок 5для включения блока 10 и на блок 6 времени для контроля движения автооператоров во времени.
Перед опусканием подвески с деталями в ванну блок 5 направляет сиг0нал опроса Б датчик 8 для определения занятости ванны и осуществляет останов устройства управления при возникновении аварийной ситуации, определяемой занятостью ванны.Посколь5ку консоль автооператора может занимать по вертикали два позиционных положения - верхнее или нижнее, фиксируемых конечными выключателями датчика 8, то отключение вертикаль0ного перемещения второго автооператора осуществляется непосредственио блоком 5 при срабатывании конечного выключателя датчика 8 без участия блока 3 сравнения.
5
При перемещении первого автооператора по горизонтали блок 1 опрашивает датчик 7, который и выдает текущий код адреса на блок 3 сравнения, где этот код сравнивается с заданным кодом. Движение по горизон0тешй первого автооператора осуществляется до совпадения указанных кодов. В случае их совпадения блок 3 сравнения выдает сигнал блоку 4 для останова первого автооператора.
5 При движении по горизонтали первого автооператора блок 3 сравнения определяет величину разности (&)заданного и текущего кодов адреса и эту разность сравнивает с единицей.
O При /& { 1 движение автооператора по горизонтали происходит с болыжэй скоростью, при /&| 1 движение автооператора происходит с малой скоростью для увеличения Точности пози5циЬнирования. Отключением первого автооператора при его движении по горизонтали и второго автооператора при его движении по вертикали заканчивается первый такт работы устройства управления.. Начинается втоОрой такт. Он аналогичен первому с той лишь разницей, что управление вертикальным перемещением осуществляется для первого автооператора, а ТОриэонтальным для второго авто5оператора. Аналогичным образом выполняются и все остальные операции такта. Таким образом, описанное устройство при управлении двухавтооператорной линией позволяет повысить производительность линии на 5-7% путем снижения времен непроизводительного простоя автооператоров, вызванных отсутствием потактовой син хронизации их работы за счет одновременной (параллельной) работы блоков управления горизонтальным и вертикальным перемещениями вследстви реализованного в устройстве потактово синхронизированного алгоритма функционирования двух взаимодействую щих автооператоров, а также эффективно использовать управляющее обору дование в связи с уменьшением числа блоков, уменьшить стоимость управляющего оборудования. Формула изобретения 1. Устройство для программного уп равления автооператорами гальванической линии, содержащее последовательно соединенные регистр адреса, блок сравнения, блок управления горизонтальным перемещением автоопе раторов и первый исполнительный механизм первого автоопера гора, втор входом соединенный с первым выходом блока управления вертикальным перемещением автооператоров, второй вых которого соединен с первым входом второго исполнительного механизма второго автооператора, первый вход блока управления вертикального пере мещения автооператоров соединен с первым выходом блока времени,вторы:м выходом соединенный с вторым входом блока управления горизонтальным пер мещением автооператоров, второй выход которого подключен к второму входу второго исполнительного механизма второго автооператора, и датчики положения первого и второго ав тооператоров, выходами соединенные, вторым и третьим входами блока срав нения, отличающееся тем что, с целью расширения функциональны возможностей устройства, в него вве ден логический блок, первым и вторы выходом соединенный с входами датчи ков положения первого и второго авт опер торюв, третьим выходом подключеннвй к второму входу блока управления горизонтальным перемещением автооператоров, третий выход которо го соединен с первым входом логичес кого блока, соединенного вторым входом с третьим выходом блока управления вертикальным перемещением автооператоров , второй вход которого подключен к четвертому выходу логического блока, пятым выходом соединенного с регистром адреса, а шестым выходом - с входом блока времени. 2. Устройство по П.1, о т л ичающееся тем, что логический блок содержит формирователь импульсов, три группы усилителей, управляющий триггер, элемент ИЛИ, два элемента И, кнопку, первый дешифратор и последовательно соединенные генератор импульсов, третий элемент И, четвертый элемент И,первый регистр, второй регистр, второй дешифратор, запоминающий элемент, усилитель считывания и пятый элемент И, выходом соединенный с четвертым выходом логического блока,вторым входом - с первым выходом управляющего триггера, второй выход которого подключен к входам усилителей первой группы и первому входу второго элемента И, а выходы усилителей первой группы соединены с пер вым, вторым и третьим выходами логического блока, вход управляющего триггера подключен к второму выходу генератора импульсов, третьим выходом соединенного через первый элемент И с первыми входами усилителей второй и третьей групп и вторым входом усилителя считывания, выход которого подключен к второму входу второго элемента И, первый и второй входы логического блока через последовательно соединенные элементы ИЛИ, третий элемент И и формирователь импульсов соединены с вторьом входом второго дешифратора, второй вход запоминающего элемента через первый дешифратор подключен к вторым выходам первого регистра, вторые входы запоминакнцего элемента подключены через третью группу усилителей к пятому выходу логического блока, а третьи выходы - через вторую группу усилителей к шестым выходам логического блока, четвертый выход генератора импульсоэ через кнопку соединен с вторым входом четвертого элемента И. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР 636585, кл. G 05 В 19/18, 1978, 2.Авторское свидетельство СССР 616610, кл. G 05 В 19/00, 1978 (прототип).
