Современные дуо-реверсивные станы (блюминги, броневые), также листовые трио-Лаута работают большей частью с электрическим нажимом верхнего валка. Это устройство признано наиболее удобным.
При прокатке какого-либо определенного сорта при стандартном размере болванки можно считать установленным, что обжатия представляют строго определенный цикл, должны быть точно определены и чередоваться в определенной последовательности.
Отсюда возникает мысль об автоматизации этого процесса.
Обычно нажимные устройства оборудованы контроллерным или контакторным управлением, приводимым в действие от руки машиниста.
Этот способ управления имеет следуюшие недостатки:
1.При быстрой работе в начале прокатки слитка всегда есть возможность превзойти допустимый предел обжатия, отчего может произойти а) брак (трещины) металла, б) выбивание автомата станового двигателя, в) нарушение схемы прокатки.
2.При окончании прокатки не всегда удается сразу получить точный профиль
металла, а поэтому на листовых станах получаются излишние задержки для проверки толщины листа, а в заготовочных (блюмингах) не всегда точный размер заготовки.
Особое значение последнее обстоятельство имеет для блюмингов, за которыми устанавливаются непрерывные станы, так как отклонение от нормальных размеров заготовки расстраивает непрерывный стан.
Кроме всего этого, ручная работа ставит стан в зависимость от квалификации болтовшика, вводит так называемое человеческое время (время реакции мускулов) в процесс прокатки и замедляет прокатку, особенно в последних проходах, когда пути болта малы, так как очень немногие болтовщики умеют работать на максимальных скоростях нажимного устройства. Многие из них опасаются быстрых темпов работы и, сдерживая скорость двигателя, увеличивают время нажима.
При громадной производительности современных станов это приводит к значительным потерям.
Предлагаемое устройство для автоматического управления электрическим двигателем нажимного механизма может
быть применен на всяком стане с электрическим нажимным механизмом и устраняет все неприятности, связанные с применением труда в таком ответственном агрегате, как блюминг или вообще тяжелый прокатный стан:
1.Устраняется зависимость от квалификации машиниста.
2.Устраняются простои на многократный замер продукции.
3.Устраняется опасность брака металла и выбивания автомата от слишком сильного обжатия.
4.Достигается точный размер продукта.
5.Достигается возможность работы на максимальных скоростях изжимз.
6.Повышается производительность.
При переходе на другой сорт проката устройство дает возможность сразу переключить стаи. С|1еи,иализаи,ия сганов в условия/с СССР дает возможность сильно ограничить число сортов. Например, можно считать, что блюминг будет иметь всего 15-20 сортов и основных схем прокатки, причем наиболее употребительными будут 5-6 схем.
Такое количество схем позволяет иметь их всегда наготове и моментально переходить с одной с.хемы на другую.
В случае введения нового профиля или новой схемы устройство может быть легко и быстро установлено или настроено на новую схему.
Время освоения нового профиля сводится этим до минимума. Наконец при какой-либо аварии, неправильности в работе, загибе болванки и т. д. есть возможность сразу вЕз1ключить автомат и перейти на ручнукэ работу. Операц1- я перехода совершается мгновенно.
Следует отметить, что электрические устройства, автоматически регулирующие нажим валков в течение цикла прокатки, вообще новизны не представляют (см., например, германский патент N° 253490). В известных устройствах как и в предлагаемом, с целью автоматической установки размера проката в разные периоды цикла прокатки, применяются управляющие цепью двигателя электромагниты-контакторы, включаемые и выключаемые в определенной последовательности коммутатором, приводимым во вращение в соответствии
с вращением приводной оси нажимного механизма; новизна предлагаемого устройства заключается в том, что у этого коммутатора, выполненного в виде электромагнитного шагового коммутатора, в цепь обмотки приводного электромагнита включен приводимый во вращение от нажимного механизма дисковый прерыватель для создания импульсов тока, а в цепь электромагнита, возвращающего коммутатор в исходное положение, включен контакт коммутатора, замыкаемый в конце цикла прокатки.
В видоизмененном устройстве вместо дискового прерьгвателя применены, согласно изобретению, три потенциометра, приводимые, во вращение от нажимного p/ exa iH3i4a через посредство приспособления для синхрокной передачи угла и образующие измерительные мостики со вспомогательными секционированными сопротивлениями, соединенные с контактами электромагнитного шагового коммутатора и служащие для управления цепями сеток электронных ламп (например, тирс1тронов), в анодные цепи которых включены контакторы, управляющие цепью двигателя.Сложная и актуальная задача автоматизации работы прокатных станов решается предлагаемым устройством вполне современными методами.
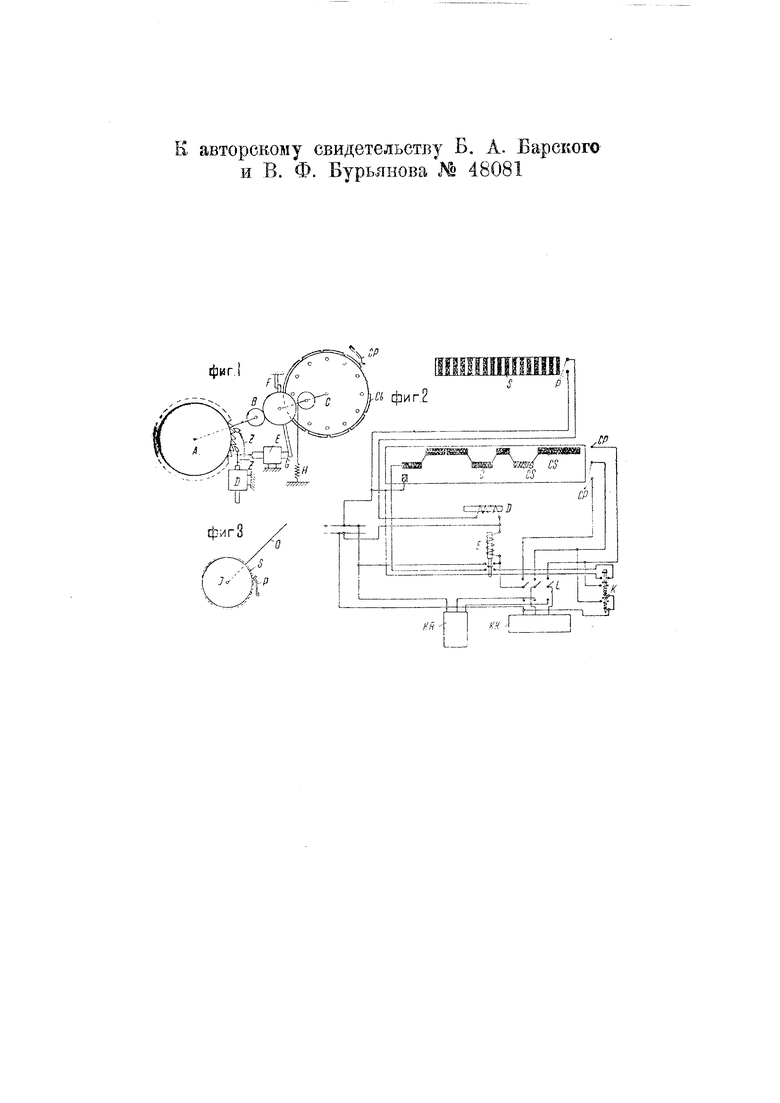
На чертеже фиг. 1 .изображает схематически механическую часть предлагаемого устройства; фиг. 2- электрическую его часть; фиг. 3-один из приборов устройства; фиг. 4-электрическую схему видоизмененного устройства; фиг. 5-схему коммутатора.
Предлагаемое устройство дает возможность дать определенный цикл работы нажимного устройства с различной величиной ходов к реверсами, где это необходимо, причем для каждого хода необходим только нажим кнопки.
Устройство по фиг. 1-3 содержит дисковь Й прерыватель/, жестко связанный с осью О с валом нажимного механизма и имеющий контактные сегменTbi S и пальцы Р, даюший импульсы тока, соответствующие определенной небольшой величине хода механизма.
Эги импульсы тока посылаются в электромагнит D, который приводит во враЩгние храповое .колесо А, поворачивая его на один зубец при каждом импульсе.
Колесо А через передачу В вращает барабан С с контактными сегментами СО и тремя контактными пальцами СР; два из пальцев дают передний или задний ход нажимному механизму, причем длина сегментов соответствует величине хода механизма.
Для пуска устройства нажимается кнопка К, которая путем специальных контактов самоблокируется, получая ток от пальцев барабана С. Нажим кнопки иодает ток контакторному управлению, запуская двигатель в том или ином направлении в зависимости от того, какой палец СР подает ток.
Нажимной механизм, посылая посредством прерывателя У импульсы тока в электромагнит D, заставляет синхронно с ним вращаться барабан С. Когда палец сходит с сегмента барабана С, кнопка К разблокировывается и нажимной механизм останавливается. Длина перерыва между сегментами выбрана так, чтобы инерция дала возможность подойти под палец следующему сегменту.
При окончании цикла в цепь управления включается электромагнит Я через третий палец барабана С.
Электромагнит Е оттягивает храповые собачки Z от колеса А, что дает возможность колесу С при помощи пружины Н возвратиться в исходное положение.
Электромагнит Е имеет контакты, разрывающие цепь первого и второго пальцев барабан С, что исключает возможность пуска двигателей во время возвращения барабана С в исходное положение.
При возвращении барабана С в исходное положение рь1чаг G отводит сердечник электромагнита Е, чем его разблокировывает и лишает тока.
После этого устройство вновь проходит к началу цикла.
В случае необходимости возможен переход на ручное управление при помощи переключателя L.
На фиг. 2 через KR условно обозначен контроллер для ручного управления двигателями нажимного механизма. КК-
контакторное управление этими двигателями.
Устройство по фиг. 1-3 было в процессе разработки его авторами видоизменено.
Причиной отказа авторов от устройства по фиг. 1-3 явилась нецелесообразная система, в которой должны были участвовать подвижные механизмы с переменой направления движения, причем частота перемен, повидимому, выходила за пределы инертности механизма и, следовательно, допускала возможность пропусков.
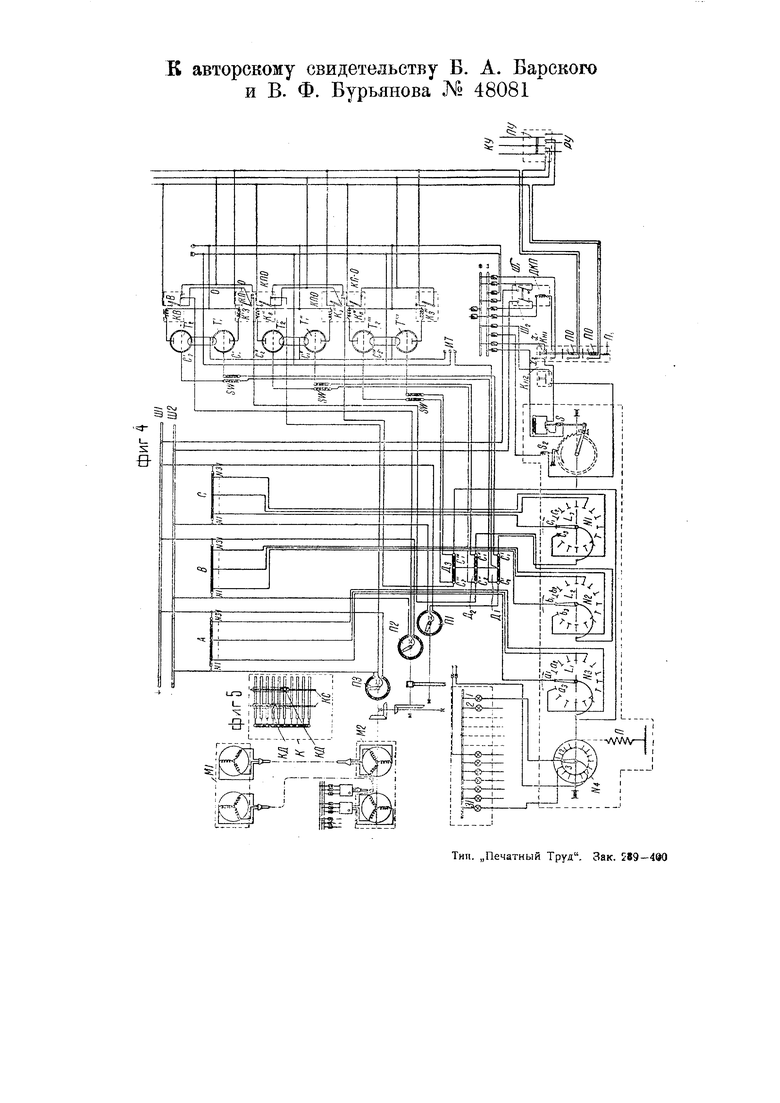
Видоизмененное устройство изображено на фиг. 4. В этом устройстве система управления работает на трех ступенях точности установки каждого прохода. Это достигается тем, что система имеет три группы контакторов управления, включаемых последовательно одна за другой. Нужная последовательность достигается благодаря их взаимной бло.кировке.
С приводом нажимного механизма соединен механически асинхронный двигатель MJ (фиг. 4) небольщой мощности; обмотка ротора электрически связана с обмоткой второго такого же двигателя М2, находящегося в помещении оператора. Механически этот второй ротор соединен с редуктором. Редуктор имеет три ступени скорости; каждая ступень соединена с потенциометром, соответственно /7/, /72, ПЗ, находящимся в цепи измерительного мостика. Мостик составляется из указанного потенциометра и сопротивления С, В или А. В мостики включены сопротивления Д), Лч и Дз; эти сопротивления, имеющие средние точки, задают напряжение, при вращении потенциометра изменяющееся от плюса до минуса значения, на сетки тиратронов, соответственно-Tj, Т ,Т ,
2 1 2.
Под влиянием этих сеточных напряжений анодные токи тиратронов изменяются от нуля до максимального значения и заставляют замыкаться или размыкаться контакторы К , К, К и К , К,, Л реверсивного управления, включая ту или иную шину Bt 3 управления.
Сопротивления А, В v( С являются установочными, так как ими устанавливается размер проката: одним устанавливаются сотни миллиметров другим - десятки миллиметров и третьим-единицы; соответственно десятичной системе каждое из згих сопротивлений имеет по десять секций. Каждое из сопротивлений Л, В, С снабжено коммутатором /1 с числом контактных движков, равным числу проходов (на фиг, 4, 5 сопротивления имеют по 31 движку); в пунктире на фиг. 4 показана часть коммутатора R с двумя движками/ГД переставляемыми вдоль контактных стержней КС. Стержни (а следовательно и движки) каждого из сопротивлений А, В. С соединены электрически с контактами шагового коммутатора, соответственно NS, As, AV
С этими коммутаторами, приводимыми одним электромагнитом, сидит на одной оси коммутатор N.i, включающий поочередно лампы /, 2....31, сигнализирующие номер прохода. /7-пружина для возвращения коммутаторов в исходное положение.
Приступая к работе, оператор по заданию производит установку контактных движков КД. Если, например, размер установки нажимного механизма во время четырнадцатого прохода равен 495, то движки Ns 14 всех коммутаторов Л ставят: в коммутаторе сотен-на цифру 4, (т. е. на четвертую ступень сопротивления), в коммутаторе десятков-на цифру 9 и в коммутаторе единиц-на цифру 5. Такая установка делается всякий раз, как только нужно изменить размеры проходов.
Начиная цикл, оператор нажимает на кнопку Kni после чего контактор ДКП включает шины Ш-, и Ш.,. В начале цикла коммутаторы jVi, N.2 и А- стоят на исходных положениях, включая движки № 1 (движки первого прохода). В этом положении сопротивление А и потенциометр /7/ составляют неуравновешенный мостик, в силу чего на зажимах сопротивления Д установится некоторое напряжение. Это напряжение подается на сетки тиратронов первой группь и заставляет в одном из них запереть анодный ток попрежнему, а у другого установить анодный ток до некоторой величины.
До этого момента, т. е. при отсутствии напряжения на сопротивлениях Д,,Д,,Д,
на сетках тиратронов имелось дополнительное отрицательное напряжение, получаемое от специального источника тока /77; величина этого напряжения подбирается до полного запирания; источник ИТ тока включен между катодами тиратронов и средними точками сопротивлений Д|, Д, Д..
Предположим, что тиратрон получил дополнительный потенциал (минус), а тиратрон 7 уменьшил его. При этом в анодной цепи установится ток, достаточный для замыкания контактора Ку, в силу чего включается шина 3 (задний ход) контакторного управления приводного двигателя нажимного устройства. При этом блок-контактом этого контактора разрывается цепь потенциометра /7,, что предохраняет от включения второй ступени точности до тех пор, пока не установится первая ступень. После установки первой ступени, что сопровождается уравновешиванием плеч мостика благодаря вращению потенциометра 77/ контактор отпадает, так как на сопротивлении Д установилось напряжение, равное нулю. После того, как контактор К- отпал, замыкаются его блокконтакты и цепь потенциометра 772, в силу чего вторая группа тиратронов Tl и Т заставит включиться контакторы К или К,, от чего нажимное устройство пройдет вторую стадию установки. Здесь процесс включения и остановки аналогичен предыдущему. После того, как все ступени сработали, токов в шинах управления, а равно в поддерживающих обмотках ПО кнопки /IHI больше не будет и кнопка отпадает под влиянием возвратной пружины Г/.. Как только кнопка установилась в исходное положение, замыкается в контактах Х-, Х цепь соленоида Sхрапового устройства; соленоид возбуждается и поворачивает подвин ные контакты /-у, L-,, L. коммутаторов /YI, А:) и А:; на один контакт и включает вместо движков j49 1 движки № 2. При этом достаточно нажать кнопку 7wY;, чтобы началась установка наьчимного устройства на второй проход. После конца каждого прохода коммутаторы поворачиваются на один контакт, включая движки следующего прохода. При желании вернуть всю систему коммутаторов в исходное положение, нажимают кнопку КНу Нажимом этой кнопки включается соленоид 5 и поднимается защелка храповика, отчего пружина /7 возвращает коммутаторы в исходное положение, т. е. устанавливает контакты Z,, L.2 и ig на контактах (Zi, b- и С.
Для переключения двигателя нажимного механизма с контакторного управления на ручное и наоборот служит переключатель ПУ управления, к контактам которого присоединены линия КУ контакторного управления и линия РУ ручного управления.
Предмет изобретения.
1. Устройство для автоматического управления электрическим двигателем нажимного механизма к валкам прокатного стана, в котором, с целью автоматической установки размера проката в разные периоды цикла прокатки, применены управляющие цепью двигателя электромагнитные контакторы, включаемые и выключаемые в определенной последовательности коммутатором, приводимым во вращение в соответствии с вращением приводной оси нажимного механизма, отличающееся тем, что у этого коммутатора С, выполненного в виде электромагнитного шагового коммутатора, в цепь обмотки приводного электромагнита D включен приводимый во вращение от нажимного механизма
дисковый прерыватель У для создания импульсов тока, а в цепь электромагнита е, возвращающего коммутатор в исходное положение, включен контакт коммутатора, замыкаемый в конце цикла прокатки.
2.Видоизменение устройства по п. 1, отличающееся тем, что вместо дискового прерывателя применены три потенциометра, приводимые во вращение от нажимного механизма через посредство приспособления для синхронной передачи угла и образующие со вспомогательными секционированными сопротивлениями А, В, С измерительные мостики, соединенные с контактами электромагнитного шагового коммутатора и служащие для управления цепями сеток электронных ламп (например, тиратронов), в анодные цепи которых включены контакторы, управляющие цепью двигателя.
3.В устройстве по пп. 1 и 2 применение пусковой нажимной кнопки, снабженной двумя соленоидами для самоблокирования кнопки во включенном положении в течение каждого хода прокатки.
4.В устройстве по п. 2 применение в качестве приспособления для синхронной передачи угла двух асинхронных двигателей, питаемых от общей линии и имеющих электрически соединенные друг с другом фазные роторы.
к авторскому свидетельству Б. А. Барского и В. Ф. Бурьянова № 48081
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического управления нажимными механизмами прокатных станов | 1936 |
|
SU59009A1 |
| Следящее устройство | 1936 |
|
SU51312A1 |
| Следящее устройство | 1936 |
|
SU59010A1 |
| Следящее устройство | 1937 |
|
SU59433A1 |
| Устройство для контакторного управления асинхронным двигателем при посредстве командо-контроллера | 1939 |
|
SU57622A1 |
| Следящее устройство | 1937 |
|
SU56723A1 |
| Автоматический потенциометр | 1939 |
|
SU58792A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РЕВЕРСИВНЫМ ПРОКАТНЫМ ИЛИ ОБЖИМНЫМ СТАНОМ | 1935 |
|
SU46993A1 |
| Следящее устройство | 1937 |
|
SU61302A1 |
| ПРОГРАММНО-СЛЕДЯЩЕЕ УСТРОЙСТВО | 1937 |
|
SU61116A1 |
фиг,

