Предлагаемое устройство относится к известному типу следящих систем с фазовым управлением, использующих в качестве приемников бесконтактные сельсины, которые выполняю роль плавных фазорегуляторов. Назначение подобного устройства состоит в пуске в ход двигателя какого-либо механизма и обеспечении автоматической точной остановки его в заданном месте.
Настоящее программно-следящее устройство основано на принципе изменения фазы переменного тока в цепи управления и состоит из датчика и приемника. Датчиком является ступенчатый фазорегулятор, в качестве которого использован трехфазный зигзаг-трансформатор с отводами, приемником - служит плавный фазорегулятор. Кроме того, в схему входят промежуточные элементы - нулевые фазовые индикаторы.
Напряжение датчика равно по величине напряжению приемника и геометрически из него вычитается; оно одновременно подается также на аноды тиратронов, входящих в схему фазовых нуль-индикаторов.
Геометрическая разность этих напряжений есть напряжение управления, которое через трансформатор управления подается на сетки тех же тиратронов; для одного синфазно, а другого - противофазно.
В момент согласования угол между напряжениями датчика и приемника равен нулю.
При рассогласовании, в зависимости от направления равности указанных напряжений, зажигается один из тиратронов, включая свой контактор, что определяет пуск управляемого двигателя в нужном направлении.
Режим тиратрона - релейный, т.е. он зажигается на полный ток или совершенно погасает, в зависимости от величины смещения сетки.
Следует отметить, что фазовое управление возможно лишь в пределах 180°, так как за пределами 180° повторяется тоже значения напряжения на сетках тиратронов.
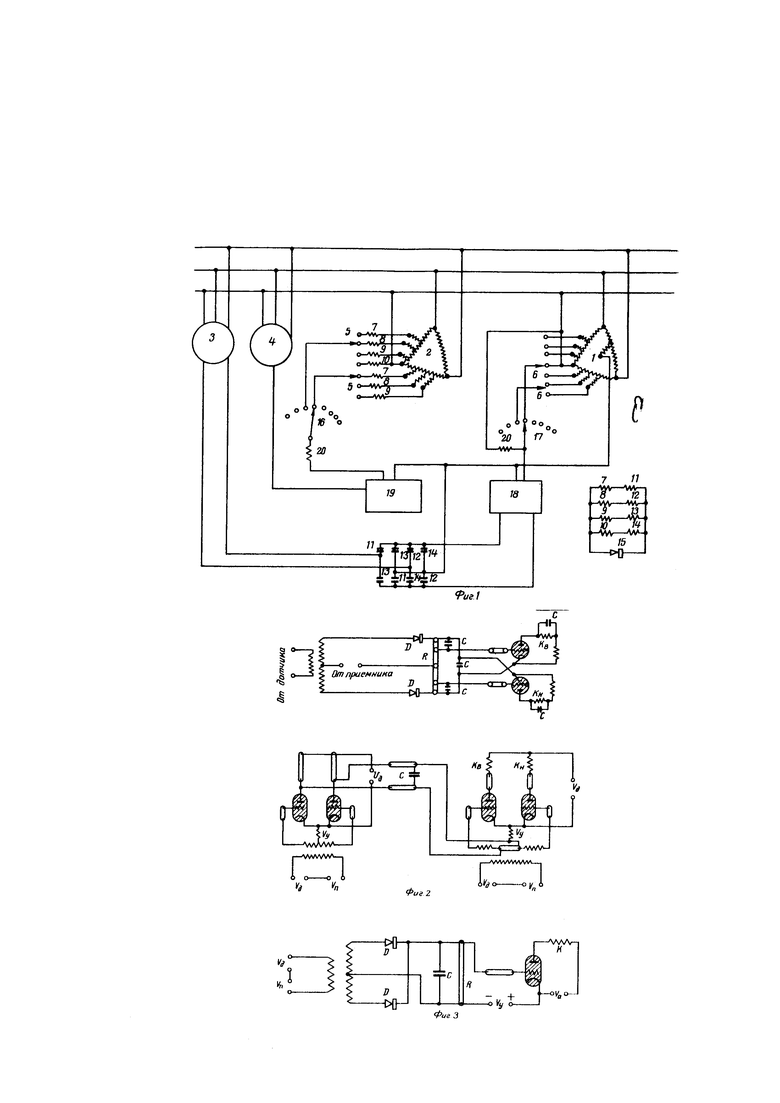
На фиг. 1 изображена общая принципиальная схема программно-следящего устройства; на фиг. 2 - нуль-индикатор в двух вариантах выполнения; на фиг. 3 - нуль-индикатор замедления.
Устройство состоит из: программной части, включающей в себя точный 1 и грубый 2 датчики, представляющие собой трехфазные трансформаторы по схеме зигзаг, дающие на отпайках напряжения, сдвинутые по фазе на определенный угол один относительно другого, равные по величине. Диапазон регулировки датчиков 90°, 120° или 180°. Работа системы описана применительно к работе с отпайками в зоне 90°; следящей части, включающей в себя приемники-фазорегуляторы любого типа, в частности типа т.н. бесконтактных точного 3 и грубого 4 сельсинов, механически связанных с управляемым механизмом; грубого 5 и точного 6 штепселей, служащих для выбора точки остановки; трансформаторов 7-10, реле 11-14 и купрокса 15, поворачивающих на 0°, 90°, 180° или 270° вектор напряжения точного приемника 3, в зависимости от того, на какой грубой ступени выбрана точка остановки. Переключение фазы точной системы необходимо ввиду того, что одной ступени грубой системы соответствует зона 90° точной; грубого 16 и точного 17 счетных коммутаторов, осуществляющих программную работу переключением цепей штепселей 6 и 5; точного 18 и грубого 19 фазовых нульиндикаторов, дающих остановку двигателя при нулевых сдвигах точных и грубых приемников и датчиков, а также дающих предварительное замедление, если это нужно; трансформатора 20 коррекции, дающего в пределах одной ступени грубой системы сдвиг вектора напряжения грубого датчика 2, примерно пропорциональный фазе точного датчика I, что дает примерное совмещение нулей грубой и точной систем, о целью увеличения зоны контроля предварения замедления.
При включении устройства, если имеется сдвиг фае между векторами напряжений грубых датчика 2 и приемника 4, нульиндикатор 19 пускает двигатель устройства в такой направлении (в зависимости от того, в какую сторону имеется сдвиг фазы), чтобы сдвиг фаз стремился к 90° или к нулю.
При этом один из трансформаторов 7-10 с одним из реле 11-14 приключает с нужной фазой точный приемник 3 к нуль-индикатору 18.
При уменьшении сдвига фаз напряжений грубой системы 2 и 4, грубый нуль-индикатор 19 отключается, передавая управление точному нуль-индикатору 18.
Последний при некотором сдвиге фаз (зависящем от скорости двигателя) производит замедление двигателя, а при нулевом сдвиге фаз производит остановку.
Первая ступень грубой системы по пути соответствует полной зоне работы точной системы. Напряжение приемника должно быть выбрано так, чтобы оно не выходило за пределы указанной зоны.
При малом рассогласовании грубой системы (выбираемом в зависимости от пути, нужного для торможения двигателя), оба тиратрона грубой системы не горят. Эта зона погасания обоих тиратронов грубой системы ("вилка" грубой системы) должна быть меньше 360° точной системы по причинам, изложенным выше.
Для большей четкости срабатывания грубой системы применена блокировка, заключающаяся в том, что при включении контакторов обеих систем "вперед" или "назад" закорачивается часть сопротивления цепи смещения сеток грубой системы, что увеличивает ее "вилку". При соответствующей регулировке эта схема обеспечивает отпадание контактора грубой системы в момент согласного включения контактора точной системы.
В основу разработок контроля торможения управляемого двигателя положены следующие соображения: торможение двигателя производится при постоянном тормозящем моменте и постоянном замедлении, т.е. при наиболее интенсивном режиме, допускаемом механизмом; торможение производится динамическое с отключением двигателя от сети.
Если начать торможение при определенной скорости, не доходя известного пути до заданной точки остановки, то обеспечивается выполнение поставленной задачи о помощью аппарата, замеряющего разность пути и отношение квадрата скорости к удвоенному ускорению, что дает возможность задания точки начала замедления и непрерывного его контроля.
В предлагаемом устройстве этот аппарат исполнен следующим образом.
Путь S, пропорциональный углу рассогласования α, связан c напряжением управления  управлениями:
управлениями:

где - напряжение датчика системы.
При угле α в пределах от 0 до 100° можно приближенно считать  , поэтому в этих пределах:
, поэтому в этих пределах:

Таким образом, напряжение является мерилом пути S.
Для получения скорости необходимо продиференцировать путь. Для этого прежде всего выпрямляем двухполупериодным кенотронным выпрямителем После выпрямления, кроме постоянной составляющей напряжения, имеются четные гармоники. Для их отфильтровки применен настроенный фильтр из двух ячеек.
Напряжение, пропорциональное пути, после фильтра подается на диференциатор, состоящий из конденсатора с и сопротивления  . Напряжение, пропорциональное производной пути или скорости, подается на сетку лампы, напряжение смещения которой подобрано так, что рабочая точка находитоя на параболическом участке характеристики лампы.
. Напряжение, пропорциональное производной пути или скорости, подается на сетку лампы, напряжение смещения которой подобрано так, что рабочая точка находитоя на параболическом участке характеристики лампы.
Это обеспечивает получение в анодной цепи лампы тока, пропорционального квадрату напряжения, соответствующего скорости.
Анодный ток дампы проходит через обмотку  подмагничивания дросселя, управляющего "вилкой" точной системы. Эта схема обеспечивает сравнение оставшегося пути и скорости.
подмагничивания дросселя, управляющего "вилкой" точной системы. Эта схема обеспечивает сравнение оставшегося пути и скорости.
При неисправностях в схеме не исключены остановки механизма не в заданном месте, что присуще любому типу аппаратуры.
Неисправности могут возникнуть как в случае, когда датчик и приемник исправны, так и когда датчики или приемник неисправен.
При любом виде неисправности напряжения  и
и  датчика и приемника не будут равны.
датчика и приемника не будут равны.
Это используется для защиты. На сетку лампы защиты подается разность напряжений трансформаторов датчика и приемника.
Режим лампы подбирается так, что реле в ее анодной цепи сбрасывает при неравенстве напряжений.
Вали при этом контакторы КВ и КН в анодных цепях тиратронов отпали, то дается сигнал и производятся нужные защитные операции.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящий привод | 1941 |
|
SU67772A1 |
| Следящий привод | 1941 |
|
SU67550A1 |
| Следящее устройство | 1937 |
|
SU61302A1 |
| Аппарат для автоматического управления нажимным устройством прокатного стана | 1935 |
|
SU77023A1 |
| Следящее устройство | 1937 |
|
SU59433A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ЧИСЛА ОБОРОТОВ ШАХТНОЙ ПОДЪЕМНОЙ МАШИНЫ | 1939 |
|
SU61119A1 |
| Следящее устройство | 1937 |
|
SU56723A1 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ТОРМОЗНЫМ КРЮКОМ И ДВИГАТЕЛЕМ ПРИ ПОСАДКЕ ЛЕТАТЕЛЬНОГО АППАРАТА НА ПАЛУБУ КОРАБЛЯ | 1996 |
|
RU2119440C1 |
| ЭЛЕКТРОННОЕ УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЯМИ ПОСТОЯННОГО ТОКА | 1948 |
|
SU93584A1 |
| Устройство для автоматического регулирования числа оборотов шахтной подъемной машины | 1939 |
|
SU58922A1 |
1. Программно-следящее устройство, работающее на принципе изменения фазы переменного тока в цепи управления и состоящее из датчиков - ступенчатых фазорегуляторов, приемников - плавных фазорегуляторов и фазовых нулевых индикаторов, отличающееся тем, что в качестве указанных ступенчатых фазорегуляторов применены трехфазные трансформаторы с рядом включенных по схеме "зигзаг" ответвленной обмотки, переключатели которых включены в цепи индикаторов.
2. Форма выполнения устройства по п. 1, отличающаяся тем, что в грубом датчике последовательно с ответвлениями обмоток включены реле для выбора фазы работы точной системы, причем цепи грубого и точного датчиков индуктивно связаны при помощи трансформатора коррекции, совмещающего у датчиков точки нулевого сдвига фаз.
3. Форма выполнения устройства по пл. 1 и 2, отличающаяся тем, что в фазовых нулевых индикаторах цепь сетки тиратронов или катодных ламп приключена к схеме, дающей напряжение, равное разности между выпрямленной суммой напряжений приемника и датчика и выпрямленной суммой напряжения приемника и повернутого на 180° напряжения датчика.
4. Форма выполнения устройства по пп. 1 и 2, отличающаяся тем, что в фазовых нулевых индикаторах цепь сетки тиратронов к схеме, дающей напряжение, равное геометрической разности разных по абсолютной величине напряжений датчика и приемника.
5. Применение в устройстве по пп. 1-4 индикатора замедления выполненного в виде тиратрона или лампы, на сетку которой подано напряжение, пропорциональное производной от выпрямленной геометрической разности напряжений датчика и приемника.
