1
Изобретение относится к области вычислительной техники, связанрюй с числовым программным управлением, и может быть использовано для расчета траекторий, описываемых уравнением нервого и второго порядка.
Известные интерполяторы, в которых расчет линейных, круговых и нараболических Т))аекторий осуществляется с использованием оценочной функции, содержат сумматор оценочной функции, к соответствующим входам которого нодключены нервая и вторая группы схем «И, и схему управления, с которой связаны входы прямого и обратного кодов первой и второй грунн схем «И,
Известные устройства не позволяют рассчитывать эллиптические, гиперболические и произвольные траектории, описываемые общим уравнением второго норядка, в том числе повернутые и смещенные относительно осей координат. Известные устройства не позволяют также )ассчитывать траектории наиболее точно.
Целью изобретения является устранение этих недостатков и одновре.менно с этим исключение предварительных расчетов дополнительных даппых (начальных установок), вводимых в интерполятор перед началом расчета траектории.
Предлагае.мый интерполятор содержит два сумматора, два реверсивных счетчика на2
чально установки и четыре группы схем «И, пр1;чем выходы первого и второго сумматоров связаны с первой и второй группами схем «И соответственно, ко входу первого сумматора нодключены третья и четвертая группы схем «И, а ко входу второго сумматора - пятая и шестая группы схем «И, входы прямого и обjiaTJioro кодов каждой группы схем «И соединены с соответствующими выходами схемы управления, к которым также подключены выходы двух реверсивных счетчиков начальной установки, выход знаковых разрядов первого и второго сумматоров связаны со схемой управления, соответствующие выходы которой соединены с входамн младщих разрядов каждого сумматора.
Это позволяет расщнрить область применения и новысить точность работы интернолятора.
Интерполятор ностроен на принципе вычнслепия оценочной функции в системе коорди1;ат, смещенной относительно основной системы координат (системы координат воспроизведения траектории кривой) па полов1шу шага квантования, что позволяет новысить точность расчета траекторий, а также упростить выражение оценочной функции и расщирить его на весь класс кривых второго норядка, в том числе смещенных и повернутых отпосителЛЧ) осей координат
:,
Точ;10СГЬ 1)Г,С11рП ЗЗС..:Я ; 7:Т1-4л, ilii.Cn:; велп-иноь :1српспд К ,ля,р;1, ciiyiiC::;: ;--- из iaкcи:v aль Ю удглс1;1;ой узлсиой о-кт: тюс1;ропзвэл,ящсй Kpin-ion к но-ллхлкли; л-мсГ; хр/SOU Г(х. ;/)---0, i ирслл :;u -I. L; Чрлол г;/лЛ.с / iii л I л.13 а и ILi Б СЛ 1 и jj,
Обозначим цифрами 1, 2, 3, .,., ,/; гсчки координат ;к)С11ролзводя1дей 1д)ивой но оси X, а цифрами i, 2. 3 п - ио o,:ii ) и зыполИИМ 10Л,СТа;10ВК
-V /;/4-0,Ь:;, г /; + П,п .
li :Ги:, vpanneiuie uociijioaaiio Д1:.Д)Л клллол Лл: -J- л:у + Ср + T- /+ После преобразований выражедие для огпзс деления значения оценочной функции в тсч ках, сме1цснных на поло}1ииу шагч к 5агго};апия 1:0 обсил ко();;д;п;ата у п:)И Пма2 ;5;1лл
ч.--5 : , . . D : л : + г : , -;-/ИЧ.5- /
; К.У + --. i
У--0
X (Л + Й + С) -0,2o(O+) + 0,of U,5o, (1)
где 0,5 6--оценочная фун1аи-1я, а носгояннак составляющая этого выражения дредставляст значение оценочной функцни и точке ,, У 0,5/1.
Выражение () елужн основой для лостроеиня структурной схемы иитер1 оля();).:1, которая нредставлена на чертеже.
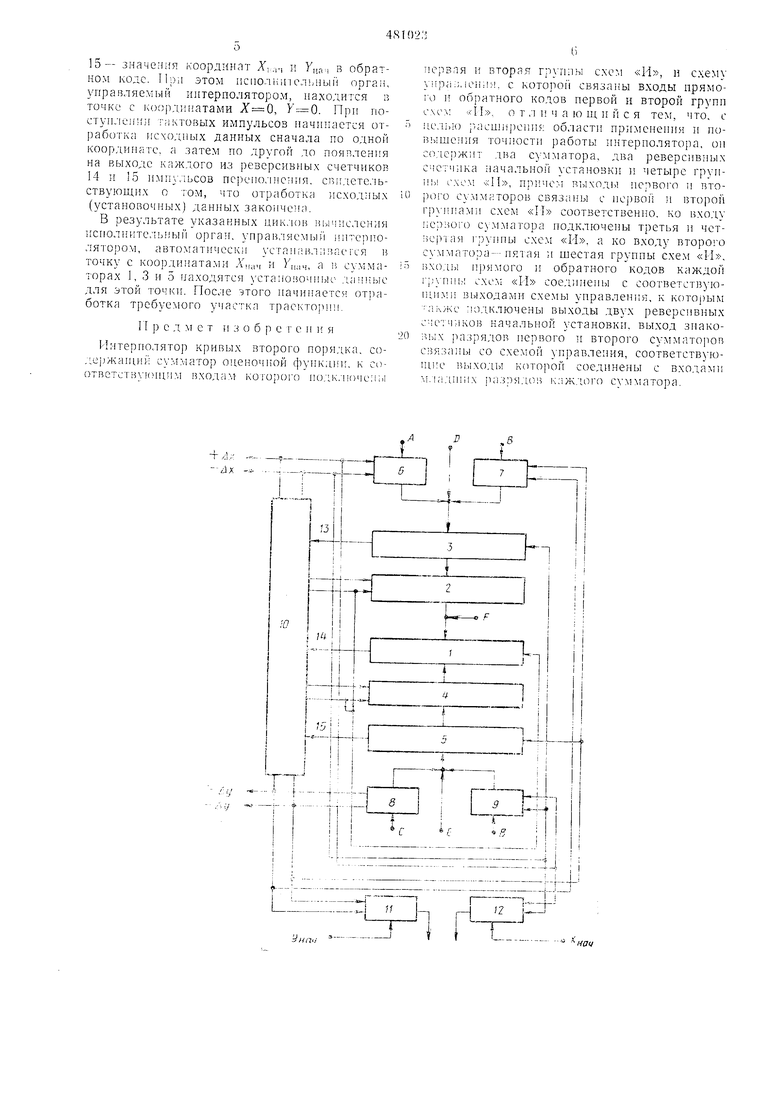
Интериолятор содержит сумматор 1 оценочной функции, со входами разрядов KOTOpoio соединены шины коэффициента г. :ерез грукпы схем «Н 2 ирямого и обраттюги ко;:,а выходы разрядов сумматора 3, через ipyi;r:b; схем «И 4 нрямого ц обратног;; код;: выходы разрядов су.мматора 5.
Сумматор I служит для jiac4CTa значения оцеиочиой функции 0,55; группы схем «М 2 и 4 служат для передачи еодержимого сумматоров 3 и 5 в сумматор 1 в прямом н обратном кодах. Сумматор 3 служит для расчета iu следието члена ряда но коорд ;нате Л, ;. с. в чем находится значенне
Л.г + 0,5|/) + 5(0,5+ /):;
C.y-hO,5 + (0,5-h/)i.
Со входами разрядов суммато)а 3 С:)еднчоны Ц1ииы коэффицнента /А через уру:,):. схем «И б Ц1, а об;;агчо10 кодо15 JIMIны коэффициента /1, через 1руины схем , прямого к обратного колов - - Ko ipibxциента В. Со входами разрядов сум:-л; ор. Г: соединены шииы коэффициента Б, чер-е; ipvnпы ехем «И 8 прямого н обратного коло:;
4
гч:л-.: ко-,-|:ф1м.чечта С. через рупчы схем :Ь 1 г;:)ямого и {.бо;;: чо; о код .;;; шнчы ко ффчп. 3.
С.,; «;:.;; ( 9 Служат л.ля иеред,ьчд лс зфijjHUiieH-KH; /ргзнеч л кр1л;он ч :,рял;ил1 и olpaiHO. Ч;- :;{ ; СУМлДЧОрВ 3 И 5.
Выхо;:,ы -jiiaKOB; ::; jJaзpядoв суммато ;ов iO---12 с;)ц- чненв1 С(; вход,амн схемы унрав.-;ечия 13 ч чре нее- с унравля10И1 н в; олпмн гругп: с.-:ем «И 2, .1, G- 9 нрямого ч обратн(сх: одо;; х со : ходамн младнл х .)а:ф;;л.;); су:маторО1:. обеснечнвая вынолнечие онеранч:; ч лрах i-, до 1;1Л11Ител;ч. чолс
ИЧ ;ы у;р;Х5ЛСЧЧЯ ЧС11ОЛЧЛ1 СЛЬНЫМ v)pi44iO,:
л.амн реверсивного счетчика 14, а по кооод чате Y со счетнвши входами реверсн:5но1о счетччка 15 со входами зтих счстчнков сосдичен 11ачалвн1з1х коорд,;:на г .V,,,.; ч Ь.,;,). В) jieBepciUiiiBix ечетч15кг:в c;iei41:0x1,: cv) чход,амл схемв унравде 1ня 11снол 1Чдаиплх.
Мчс с):о:1Я: (j) p;:6o:;ci 1с1ед чо1:1,|: обра ч; :vi.
15 ча-ч1л,4,|й расчета Т аектор1ч:
: p4Boi: :: с;, ,..; ч rojic - () :|/1Хилч i.cr :-;;:ач с н 1U
/Щ,,, Н-0,5|/)т-5(н:,ч-0,5). с ,:rrropc 5
С- )„,,+ п,(А„,,-0,5)|.
1 :1ачен:1е o:ie4G4: ofi UJVH;4i:i4
и на,
lijjH ноявлснни тактового гшнульса :ia входе схемь ч1равле:1ия ч завиеимости от значений MiasiOB )оГ) :, 3 н 5 вв1рабатв1вается 44Hii нз сн :1ало1 но .i управления иснo,тl:iгreльнь:: : ор:ат:ом ±Лх, ±Лу и :1ачи а:с:т )4чят1 ся операцпи сложения н вычнтачня :i суммалорах 3 ч 5. С задержкой в:)ел:к, геобходи: 10с для вв1нолнен :я операций в сух:мато)ах 3 и 5, начинает выполняться очерания ело:н еция нли вычитания в суммато|)е 1, :1осле чв1нолче::ия которой на входв схеллч ч равле:1 1я 13 поетупагот задержанные сЧ1чаль: с :5:; холов : наковых разрядов су:.маioi)o:i 3 с 5 1 с :;в1хода знакового разряда io:;/; ;. I hi нозыл значениям ьнак.ОБЫх ,,4 --/JHx c ixiaxopOB ;}Ы|)абатывается ;;,л-л; i3 сч:-ча iOB :н; цлппп чиравдения исполггтель. :.,. jjJiaHO : rr.x, з:;Ду. С ноявлечич; слсд ч;;п;,нх i актовых и:11иульсов :тикл x:i;(ri4ji Hi; ср;:;.)л ггора повторяется до тех пор, чс .х: отработан нснолн1ггелы1В1м оо:iio:c .иый .часток :)аекгории.
HCi-icxDXTiMOCTi; )ас-:ета исходных (-ста:-:овоч:1В1х I частых на самол интерполяторе в су: :мато1) :5водят данные 0,25 (+D)+
I 0,i 25(л-1-Д-гС)+0,5.Г, в сумматоры 3 и 5- : а-11Д не 0,25В. i рсвереивнвс счетчики 14 и
| название | год | авторы | номер документа |
|---|---|---|---|
| Трехкоординатный линейный интерполятор | 1982 |
|
SU1037214A1 |
| Интерполятор | 1978 |
|
SU798729A1 |
| Круговой интерполятор | 1989 |
|
SU1665343A1 |
| Интерполятор | 1987 |
|
SU1413602A1 |
| Интерполятор | 1988 |
|
SU1541557A1 |
| Устройство для формирования шаговых траекторий | 1979 |
|
SU930262A1 |
| Линейный интерполятор | 1989 |
|
SU1674064A1 |
| Многокоординатный цифровой линейный интерполятор | 1987 |
|
SU1522154A1 |
| Цифровой линейный интерполятор | 1991 |
|
SU1807450A1 |
| Линейно-круговой интерполятор | 1985 |
|
SU1259218A1 |
