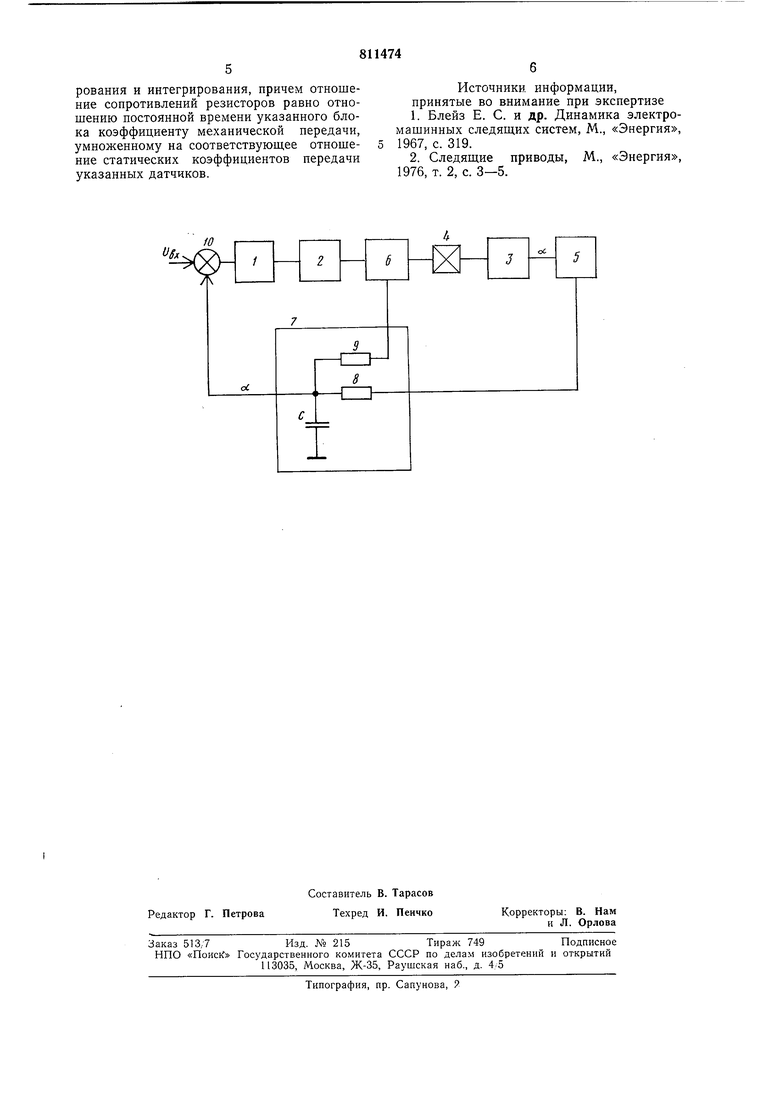
Электропривод содержит преобразователь 1, исполнительный двигатель 2, связанный с объектом 3 регулирования через редуктор 4, датчик 5 положения, установленный на валу объекта регулирования, и датчик 6 скорости, сцепленный непосредственно с валом двигателя 2. В цепь главной обратной связи введен блок 7 суммирования и интегрирования, выполненный в виде апериодического звена, с двумя входными резисторами 8 и 9. Резистор 8 соединен с выходом датчика 5, а резистор 9 - с выходом датчика 6. Выход блока 7 связан с одним из входов схемы 10 сравнения, на второй вход которой подается входное напряжение /ВХВ качестве датчика 5 может быть использован потенциометр, а в качестве датчика 6-тахогенератор постоянного тока. Возможно также выполнение блока 7 суммирования и интегрирования на базе операционного усилителя. Устройство работает следующим образом. Выходное напряжение датчика 5 пропорционально угловому положению а объекта регулирования .a,(1) где ka - статический коэффициент передачи датчика 5. При заземленном резисторе R т. е. отсутствии сигнала с датчика 6, напряжение на выходе блока 7 составляет и и, . +рТ где Г G Ri + Ri - постоянная времени блока 7. Напряжение на выходе датчика 6 пропорционально скорости вращения исполнительного двигагеля или скорости вращения объекта регулирования ра, приведенной через коэффициент механической передачи i Ut .,(2) где km - статический коэффициент передачи датчика скорости. При заземленном резисторе Ri, т. е. при , на выходе блока 7 имеет место напряжениеRI1 U7 U, RI + RZ i+pT При совместном действии обоих датчиков J, U7 + Ur (Ri + Ri) (1 + РТ) X(f/ + )Подставляя в полученное выражение соотношения (1) и (2), после преобразования получим k RI - р -- -р- t А +рТ При условии А соотношение (3) преобразуется к виду 7 . Таким образом, выходное напряжение блока 7 представляет собой пропорциональную функцию угла поворота объекта регулирования а, и привод оказывается замкнутым по углу. Введение в цепь главной обратной связи инерционного звена при соответствующем выборе величины постоянной времени Г фильтра позволяет подавить автоколебания, вызванные упругими деформациями механической передачи. В свою очередь запаздывание, вносимое фильтром в отработку изменения углового положения объекта регулирования при выполнении условия (4), полностью компенсируется за счет введения дополнительного форсирующего сигнала, пропорционального скорости. В результате влияние погрешностей механической передачи полностью исключается без ухудшения динамических свойств привода. Формула изобретения 1.Электропривод, содержащий исполнительный электродвигатель, преобразователь, подключенный к исполнительному электродвигателю, датчик скорости, связанный через механическую передачу с валом объекта регулирования, датчик положения объекта регулирования с выходом на постоянном токе, связанный через цепь главной обратной связи с первым входом блока сравнения, второй вход которого подключен к блоку задания, а выход-кпреобразователю, отличающийся тем, что, с целью повышения быстродействия и помехозащищенности, снабжен блоком суммирования и интегрирования, включенным в цепь главной обратной связи, причем один вход блока соединен с выходом датчика положения объекта регулирования, другой его вход - с выходом датчика скорости, а выход - с блоком сравнения. 2.Электропривод по п. 1, отличающийся тем, что блок суммирования и интегрирования выполнен в виде соединенных между собой резисторов и конденсатора, общая точка соединения которых образует выход указанного блока, а свободные концы резисторов образуют вход блока суммирования и интегрирования, причем отношение сопротивлений резисторов равно отношению постоянной времени указанного блока коэффициенту механической передачи, умноженному на соответствующее отношение статических коэффициентов передачи указанных датчиков.
Источники информации, принятые во внимание при экспертизе
1.Блейз Е. С. и др. Динамика электромашинных следящих систем, М., «Энергия, 1967, с. 319.
2.Следящие приводы, М., «Энергия, 1976, т. 2, с. 3-5.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ С ВЯЗКОУПРУГОЙ КИНЕМАТИЧЕСКОЙ СВЯЗЬЮ | 2010 |
|
RU2446552C2 |
| Способ регулирования сварочной дуги и устройство для его осуществления | 1985 |
|
SU1328103A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
| Электропривод постоянного тока шахтной подъемной установки | 1985 |
|
SU1301757A2 |
| Способ частотно-токового управления асинхронной машиной | 1973 |
|
SU680130A2 |
| Регулируемый электропривод | 1980 |
|
SU957397A1 |
| Электропривод постоянного тока с упругой связью между электродвигателем и механизмом | 1986 |
|
SU1418878A1 |
| Следящий электропривод | 1980 |
|
SU974333A1 |
| Следящий электропривод | 1983 |
|
SU1131009A2 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ | 2010 |
|
RU2428735C1 |
10
