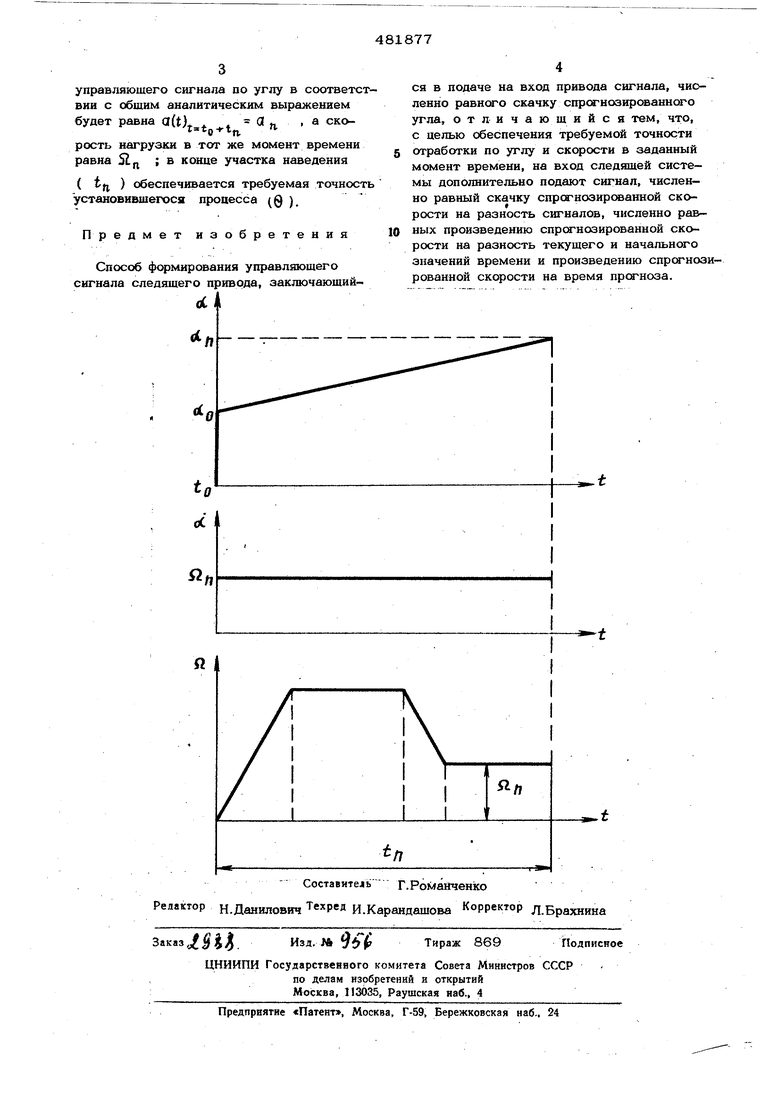
управляющего сигнала по углу в соответствии с общим аналитическим выражением
будет равна a(tL . 3 ,, , а скоItg-fi лрость нагрузки в тот же момент времени равна SLf ; в конце участка наведения
( tfj ) обеспечивается требуемая точность установившегося процесса (0 ).
Предмет изобретения
Способ фсфмирования управляющего сигнала следящего привода, заключающийflC
ся в подаче на вход привода сигнала, численно равного скачку спрогнозированного угла, отличающийся тем, что, с целью обеспечения требуемой точности
отработки по углу и скорости в заданный момент времени, на вход следящей системы дополнительно подают сигнал, численно равный скачку спрогнозир жанной скорости на разность сигналов, численно рав-
ных произведению спрсинозированной скорости на разность текущего и начального значений времени и произведению спрогнозированной скорости на время .
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство формирования управляющего сигнала следящего привода | 1984 |
|
SU1348768A1 |
| Устройство для управления следящим приводом | 1973 |
|
SU648942A1 |
| Способ управления дифференциальной следящей системой | 1973 |
|
SU546848A1 |
| Двухканальный следящий привод | 1975 |
|
SU661498A1 |
| Устройство для формирования управляющего воздействия следящего привода | 1973 |
|
SU516016A1 |
| Следящий привод | 1974 |
|
SU550630A1 |
| Дискретный электропривод | 1977 |
|
SU809055A1 |
| Двухдвигательный следящий привод | 1975 |
|
SU742867A1 |
| Силовой электрогидравлический следящий привод | 1975 |
|
SU589590A1 |
| Двухканальный частотно-регулируемый электропривод | 1974 |
|
SU541141A1 |
to
оС I
