1
Известна дифференциальная система, содержащая следящий и опорный каналы, соединенные с выходом системы через сумматор.
В такой системе постоянное значение выходного сигнала обеспечивается при ненулевой, так называемой опорной скорости движения на выходах опорного и следящего каналов, задаваемой источником опорных сигиалов, а изменение состояния на выходе системы производится за счет изменения величин скорости движения, создаваемой следящим каналом
1.
Известен также способ управления дифференциальной следящей системой, заключающийся в формировании управляющего воздействия, проиорционального алгебраической сумме управляющих сигналов следящего и опорного каналов; при этом осуществляется стуиенчатое изменение величины скорости движения на выходе опорного канала ири необходимости увеличения скорости движения на выходе системы сверх максимальной разности скоростей движения каналов при исходной опорной скорости 2.
Такая необходимость возникает, в частности, при выполиении следящей системой наведения объекта регулирования в заданную точку за заданное время с обеспечением в ней заданной скорости дальнейшего движения.
Недостатком указанного способа является
невысокая точность системы в моменты переклЕОчения скоростей.
С целью повыщения точности управления дифференциальной следящей системой одновременно с управляющим воздействием формируют доиолнительный сигнал, ироиорциональный половине текущего значения ускорения движеиия объекта системы и суммируют его с уиравляющим сигналом опорного каиала.
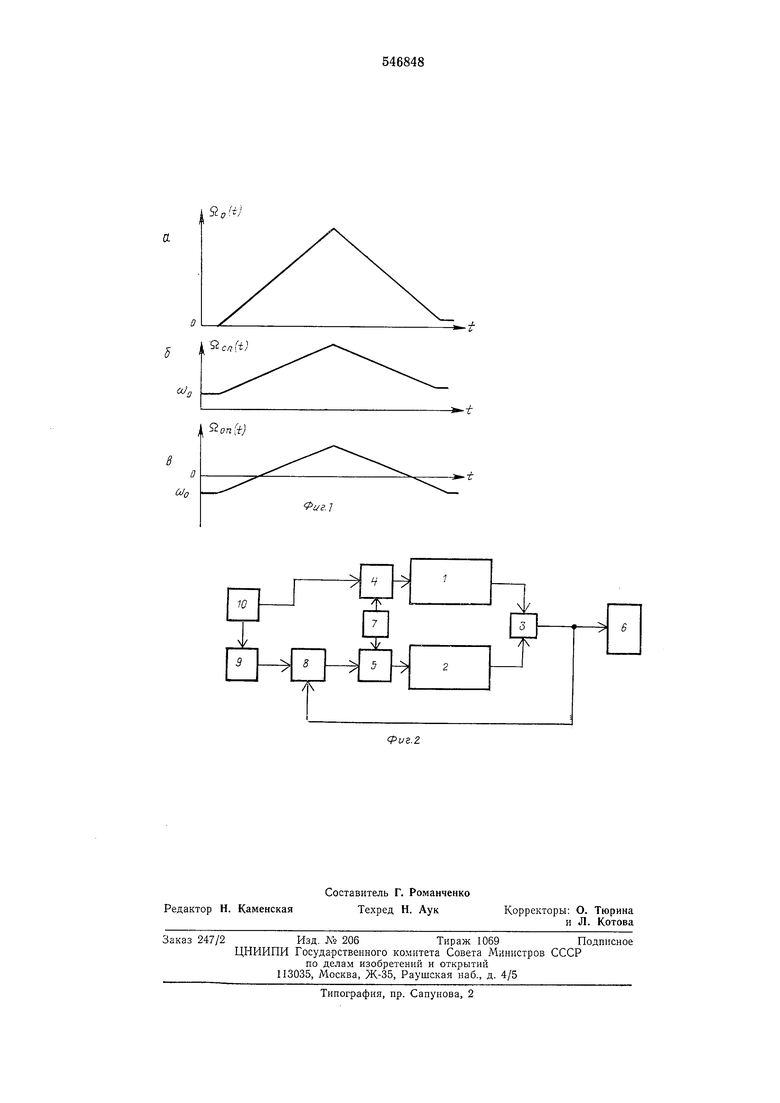
На фиг. 1 представлены временные диаграммы измеиення скоростей дифференциальной следящей системы, опорного и следящего каналов; на фиг. 2 - структурная схема дифференциальной следящей системы, реализующей данный способ.
На фиг. 1 приняты следующие обозначения: fio(0 -скорость движения на выходе следящей системы;
Qca(0-скорость движения на выходе следящего канала;
йоп(0-скорость движения на выходе опорного канала;
соо - величина опорной скоростп, т. е. скорости на выходах каиалов в исходном состоянии.
В исходном состоянии на выходах следящего и опорного каиалов сформирована и поддерживается постоянной скорость движения, равная «о; при этом в результате суммирования скорость движения на выходе дифференциальной следящей системы равна нулю.
При необходимости вынолнения наведения объекта регулирования на входе следящей системы формируется необходимое управляющее воздействие, скорость изменения которого, например, может иметь вид, показанный на фиг. 1,а. По предлагаемому способу одновременно с тем, как следящий канал, на вход которого поступает это воздействие, отрабатывает его, на входе опорного канала формируют дополнительный сигнал, пропорциональный половине текущего значения ускорения движения. При этом скорость движения на выходе онорного канала изменяется так, как это иоказано на фиг. 1,в, и в результате этого снижается величина скорости движения на выходе следящего канала, отрабатывающего вторую половину текущего значения ускорения движения.
При этом в том случае, когда знак требуемой скорости движения при выполнении наведения объекта не совнадает со знаком опорной скорости на выходе опорного канала его скорость может изменить свой знак, принимая к моменту окончания наведен-ия исходное значение соо; если же знаки этих скоростей совпадают, то происходит изменение направления скорости движения, создаваемой следящим каналом.
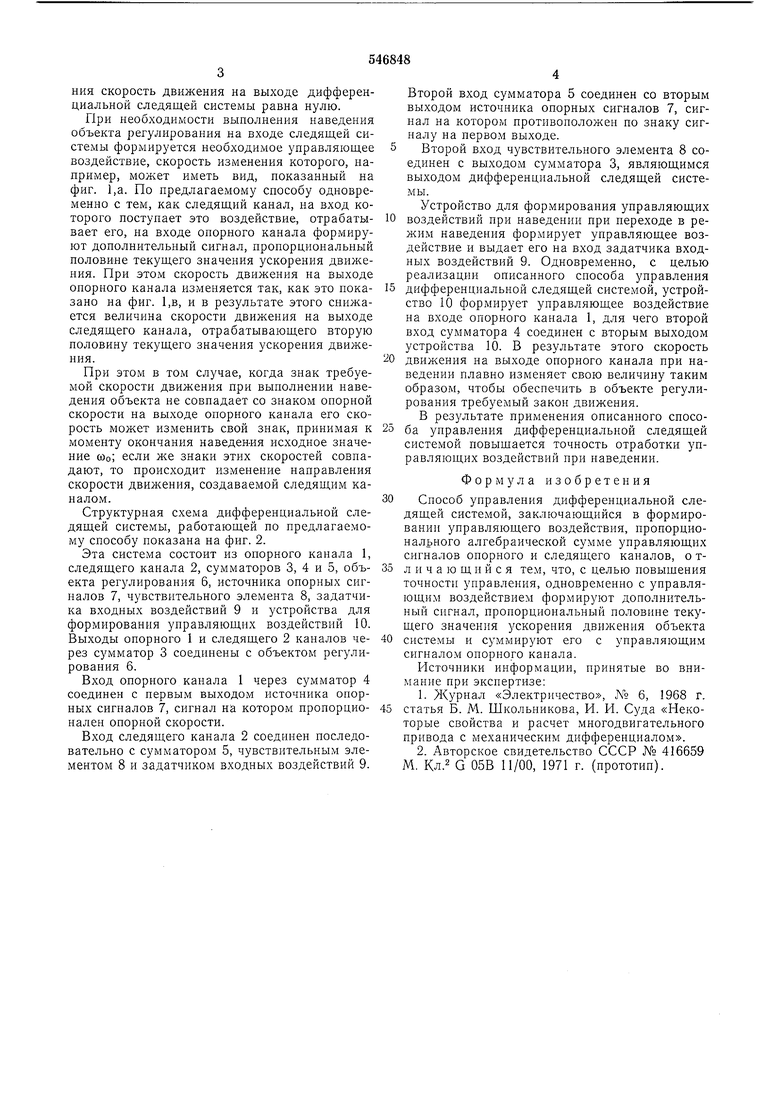
Структурная схема дифференциальной следящей системы, работающей по предлагаемому способу показана на фиг. 2.
Эта система состоит из опорного канала 1, следящего канала 2, сумматоров 3, 4 и 5, объекта регулирования 6, источника опорных сигналов 7, чувствительного элемента 8, задатчика входных воздействий 9 и устройства для формирования управляющих воздействий 10. Выходы опорного 1 и следящего 2 каналов через сумматор 3 соединены с объектом регулирования 6.
Вход опорного канала 1 через сумматор 4 соединен с первым выходом источника опорных сигналов 7, сигнал на котором пропорциопален опорной скорости.
Вход следящего канала 2 соединен последовательно с сумматором 5, чувствительным элементом 8 и задатчиком входных воздействий 9.
Второй вход сумматора 5 соединен со вторым выходом источника опорных сигналов 7, сигнал на котором противоположен по знаку сигналу на первом выходе.
Второй вход чувствительного элемента 8 соединен с выходом сумматора 3, являющимся выходом дифференциальной следящей системы.
Устройство для формирования управляющих воздействий при наведении при переходе в режим наведения формирует управляющее воздействие и выдает его на вход задатчика входных воздействий 9. Одновременно, с целью реализации описанного способа управления дифференциальной следящей системой, устройство 10 формирует управляющее воздействие на входе опорного канала 1, для чего второй вход сумматора 4 соединен с вторым выходом устройства 10. В результате этого скорость движения на выходе опорного канала при наведении плавно изменяет свою величину таким образом, чтобы обеспечить в объекте регулирования требуемый закон движения.
В результате применения описанного способа управления дифференциальной следящей системой повыщается точность отработки управляющих воздействий при наведении.
Формула изобретения
Способ управления дифференциальной следящей системой, заключающийся в формировании управляющего воздействия, пропорционального алгебраической сумме управляющих сигналов опорного и следящего каналов, о тл и ч а ю щ и и с я тем, что, с целью повыщения точности управления, одновременно с управляющим воздействием формируют дополнительный сигнал, пропорциональный половине текущего значения ускорения движения объекта системы и суммируют его с управляющим сигналом опорного канала.
Источники информации, принятые во внимание при экспертизе:
1.Журнал «Электричество, № 6, 1968 г. статья Б. М. Школьникова, И. И. Суда «Некоторые свойства и расчет многодвигательного привода с механическим дифференциалом.
2.Авторское свидетельство СССР № 416659 М. Кл.2 G 05В 11/00, 1971 г. (прототип).
t
йслЦ)
Ojn
1 oпffJ
Uo
fue.l
±
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для формирования управляющего воздействия следящего привода | 1973 |
|
SU516016A1 |
| Дфухканальная следящая система | 1980 |
|
SU954923A2 |
| Устройство для управления следящим приводом | 1973 |
|
SU648942A1 |
| Двухканальная следящая система | 1974 |
|
SU487375A1 |
| СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2388010C1 |
| Следящий привод | 1974 |
|
SU550630A1 |
| Двухканальный следящий привод | 1975 |
|
SU661498A1 |
| Дифференциальная следящая система | 1975 |
|
SU732801A1 |
| Устройство для управления наведением телескопа | 1974 |
|
SU560213A1 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ МОМЕНТОМ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2459345C2 |