Изобретение относится к системам автоматического управления и может быть использовано при построении прецизионных двухканальных следящих приводов с силовым опорным каналом. Известен двухдвигательный следящий привод с силоЕым опорным каношом содержащий чувствительный элемент, сумматоры, редуктор и двигатель fij Недостаток известного привода - малая точность. Наиболее близким к предлагаемому техническим решением является привод содержащий силовой блок опорного канала, источник опорного сигнала и последовательно соединенные первый сумматор, второй сумматор, силовой блок управляемого привода, дифференциал и редуктор, выход которого соединен с нагрузочным элементом; ко вторым входам второго сумматора и дифференциала подключены соответстве но первый выход источника опорного сигнала и выход силового блока опорного канала, а ко входу первого сумматора подключен выход нагрузочного .элемента. Известные приводы позволяю обеспечить минимальные скорости пере мещения нагрузочного элемента за счет вычитания на механическом дифференциале высоких скоростей силового и опорного каналов, что улучшает условия обдува двигателей и позволяет обеспечивать широкий диапазон регулирования скорости нагрузочного элемента при малых диапазонах изменения скоростей двигателей управляемого и опорного каналов 2j. Недостатками известных приводов являются недоиспользование динамических возможностей опорного канала и отсутствие коррекции привода при изменении параметров элементов управляемого и опорного каналов, что не обеспечивает .требуемой точности и быстродействия привода. Цель изобретения - повышение точности и быстродействия двухдвигательного следящего привода. Поставленная цель достигается тем, что в привод дополнительно вводятся последовательно соединенные- блокреле, интегратор, умножитель и третий сумматор, причем второй выход источника опорного сигнала соединен со вторым входом у «1ножителя, третий выход через третий сумматор - со входом силового блока опорного гсанала,
а выход первого сумматора соединен с первым- входом блока-реле и вторым входом интегратора.
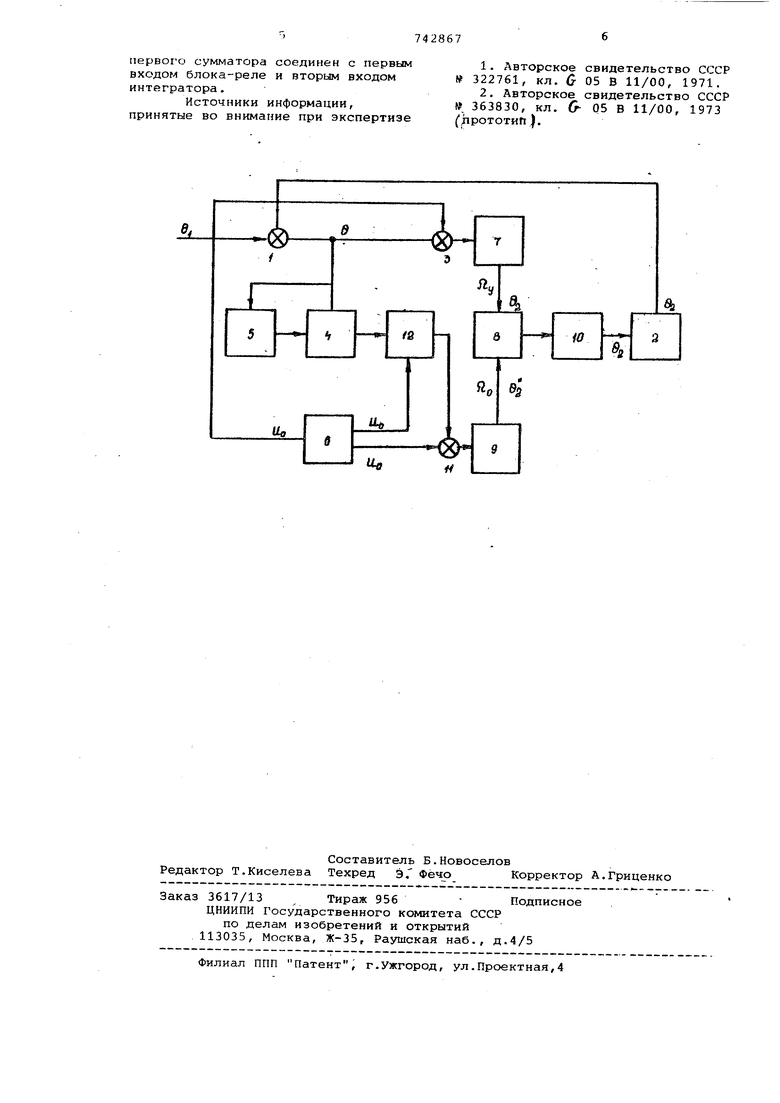
На чертеже представлена блок-схема привода (0/, - соответственно входная величина, выходная величина и ошибка привода; 61,,,с.оответственно углы поворота и скорости исполнительных двигателей си- i тгозых блоков управляемого и опорног© пр1 водов, C/Q - опорный сигнал) .
,; Схема состоит из первого сумматора 1, на один вход которого поступает сигнал Q(t) , а второй вход соединен с рыходом нагрузочного элемента 2, выХод сумматора 1 соединен с первым вхрдом второго сумматора 3, первым входом интегратора 4 и входом блокаpdne 5.
Второй вход сумматора 3 соединен с ;первым выходом источника 6 опорных сцгналов, а выход соединен со входом С1 лового блока 7 управляемого привода , выход которого соединен с первым вНодом дифференциала 8, второй вход которого соединен с выходом силового Ълока 9 опорногопривода,а вйход ,т-,- со входом редуктора 10, выход которого соединен со входом нагрузочного элемента 2. Вход блока 9 соединен с .выходом третьего сумматора 11, первый вход которого соединен со вторым выходом источника б, а второй вход с выходом умножителя 12, первый вход которого соединен с третьим выходом источника 6, а второй - с выходом интегратора 4.Второй вход интегратора 4 соединен с выходом блока-реле 5
Привод работает следующим образом
При отсутствии сигнала , (-t) за счет сигнала 1 с источника б элементы 7 и 9 обеспечивают на соответствующих входах дифференциала В скорости, равные по величине, но противоположные по знаку. Нагрузочный элемент 2 неподвижен.
Велика счет различия параметров элементов и 9 скорости различны даже при f(if)j 0, то появляется в приводе статическая Ошибка привода Д устранения ее интегратор 4 интегрирует eer а в блоке 12 полученная величина перемножается с сигналом UQ , создавая на входе опорного йривода дополнительный сигнал, необходимый для обеспечения необходиMorip увеличения или уменьшения величины, при которой обеспечено . Блок-реле 5 обеспечива ет переключение знака интегрирования ошибки & интегратором 4 в зависимости от знака & .
При наличии 0(t) величина & необходима для управления блоком 7 с целью обеспечения необходимого отклонения -Qfl . Величина резко
уменьшается за счет того, что Q опять же интегрируется интегратором 4, и за счет полученной величины, перемноженной в умножителе 12, создается необходимая добавка на входе блока 9. Необходимая разность , теперь уже обеспечивается обоими приводами, а не одним управляемым, как раньше. За счет этого возрастает и быстродействие привода в целом.
Если передаточные функции элементов 1,7,4,9 и 10 привода равны
Ki(p)l,KKP) (.p) -,)|-%Kwtp)l,
а дифференциал эквй-йалентен сумматору, то
). (0.-бД
e: -6lQl- 6i- 6B- o- ui
,-u,,,
fi- il:LMlilJl
P2+ NP
Из анализа последнего выражения следует, что в предложенном приводе статическая и кинематическая ошибки равны нулю, а влияние разброса К и
5 Кд на точность привода исключено.
Использование предлагаемого решения позволяет повысить точность и быстродействие привода введением сравнительно простых элементов без
Q изменения исходной структуры привода.
Формула изобретения
, Двухдвигательный следящий привод, содержащий силовой блок опорного канала, источник опорного сигнала и последовательно соединенные первый сумматор, второй сумматор, силовой,блок управляемого привода, дигьференциал и редуктор, ВЫХОД которого соединен с
0 нагрузочным элементом, ко вторьп вХоДс1М второго сумматора и дифференциала подключены соответственно первый выход источн.ика опорного сигнала и выход силового блока опорного канае ла, ,а ко входу первого сумматора
подключен выход нагрузочного элемента,отличаю щийс я тем, что, с целью повышения точности и быстродействия привода, он содержит последовательно соединенные блок0 реле, интегратор, умножитель и третий сумматор, второй выход источника опорного сигнсша соединен со вторым входом умножителя, третий выход через третий сумматор -со входом силового блока опорного канала, а выход
первого сумматора соединен с первым входом блока-реле и вторым входом интегратора.
Источники информации, принятые во внимание при экспертизе
1,Авторское свидетельство СССР № 322761, кл. б- 05 В 11/00, 1971.
2,Авторское свидетельство СССР № 363830, кл. О 05 В 11/00, 1973 CjhpoTOTHn).
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухканальный следящий привод | 1975 |
|
SU549781A1 |
| Двухканальный следящий привод | 1974 |
|
SU515083A1 |
| Двухканальный следящий привод | 1975 |
|
SU809050A2 |
| Устройство для формирования управляющего воздействия следящего привода | 1973 |
|
SU516016A1 |
| Следящий привод | 1977 |
|
SU857924A1 |
| Двухканальный следящий привод | 1975 |
|
SU661498A1 |
| Следящий привод | 1974 |
|
SU550630A1 |
| Двухканальная следящая система комбинированного регулирования | 1974 |
|
SU498603A1 |
| Двухдвигательный следящий привод | 1977 |
|
SU650051A1 |
| Двухканальная следящая система | 1973 |
|
SU446027A1 |
