Изобретение относится к устройствам числового программного зшравле- ния металлорежущими станками и может быть использовано для управления двухкоординатными системами в различных устро йствах программного управления.
Цепь изобретения - повышение быстродействия интерполятора.
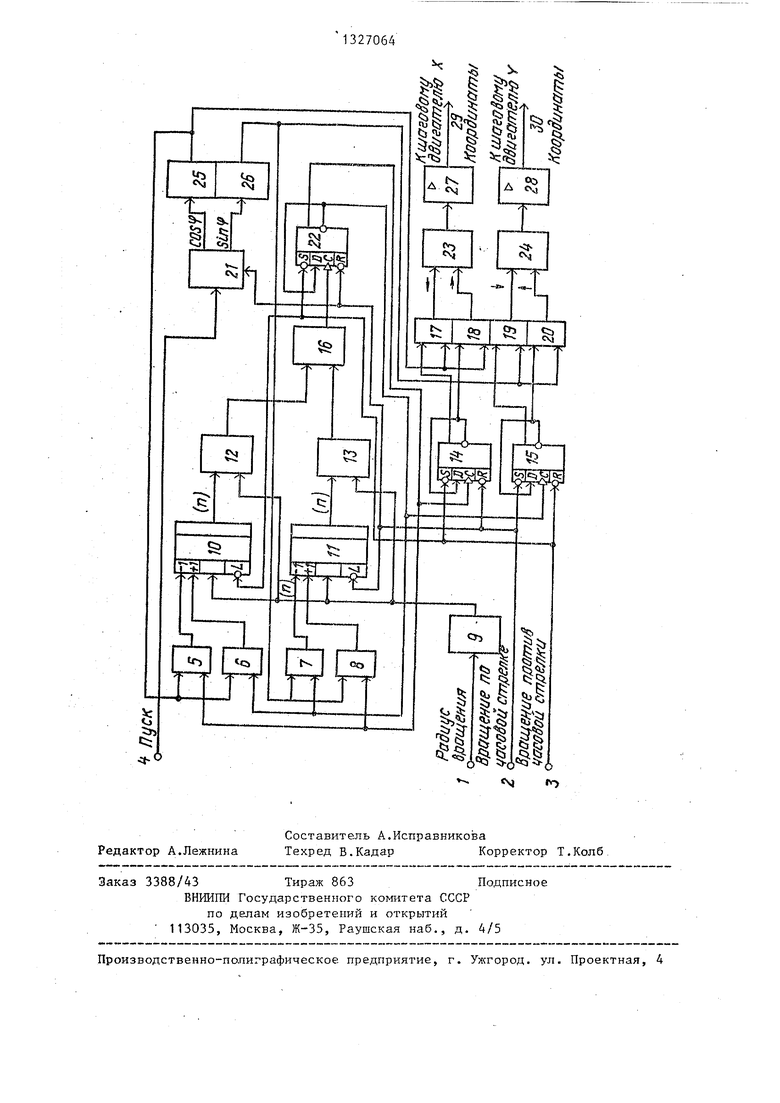
На чертеже показана блок-схема цифрового кругового интерполятора.
Цифровой круговой интерполятор содержит вход 1 задания радиуса вращения, вход 2 задания вращения в прямом направлении, вход 3 задания вращения в обратном направлении, вход 4 запуска интерполятора 4, первый 5, второй б, третий 7 и четвертый 8 элементы И, регистр 9 радиуса вращения, первый 10 и второй 11 реверсивные двоичные счетчики, первый 12 и второй 13 цифровые компараторы, первый 14 и второй 15 D-триггеры, элемент ИЛИ 16, пятый 17, шестой 18, седьмой 19 и восьмой 20 элементы И, цифровой генератор 21 функций синуса и косинуса, третий D-триггер 22, коммутатор 23 фаз шагового двигателя X координаты, коммутатор 24 фаз шагового двигателя Y координаты, первый 25 и второй 26 преобразователи напряжение - частота, усилители 27 и 28 токов фаз шаговых двигателей X н Y координат и выходы 29 и 30 интерполятора.
Цифровой круговой интерполятор работает следующим образом.
Из устройства управления через вход 1 задания радиуса вращения в регистр 9 радиуса вращения вписывается необходимый радиус вращения. Затем в зависимости от необходимого направления вращения значение радиуса вращения (п разрядов) переписывается в первый 10 или во второй 11 реверсивный счетчик из регистра 9 радиус а вр аще ния.
Рассмотрим режим круговой интерполяции по часовой стрелке. Б этом режиме из устройства управления через вход 2 задания вращения в прямом направлении отрицательным импульсом значение радиуса вращения переписывается из регистра 9 радиуса вращения во второй реверсивный счетчик 11 (уровни управляющих сигналов выбраны аналогичными для соответствующих элементов серии К155, например К155 ИЕ7
10
15
20
(элементы 10 и 11), К155ТМ2 (элементы 14, 15 и 22). Во втором реверсивном счетчике J-l представляется знаg чение текущей координаты по оси Y, а в первом реверсивном счетчике 10 хранится значение текущей координаты по оси X. После занесения информации в реверсивные счетчики 10 и-11 в реверсивном счетчике 10 вписано нулевое значение координаты Х, а в реверсивном двоичном счетчике 11 хранится значение радиуса вращения. Одновременно с занесением информации во второй реверсивньй двоичный счетчик 11 сигналом задается вращение в прямом направлении, второй D-триггер 15 устанавливается в единичное состояние, а первый D-триггер 14 и третий D- триггер 22 - в нулевое состояние.
При поступлении из устройства управления через вход 4 запуска интерполятора потенциального сигнала ПУСК цифровой генератор 21 начинает гене25 рировать взаимосвязанные функции косинуса и синуса. При этом изменяющееся по косинусоид ал ьному закону напряжение поступает на первый преобразователь 25 напряжение - частота, а
30 напряжение, изменяющееся по синусоидальному закону - на второй преобразователь 26 напряжение - частота. С выхода йервого преобразователя 25 напряжение - частота частота, про2g порциональная текущему значению входного напряжения, посгупает на входы первого 5, второго 6, пятого 17 и шестого 18 элементов И.. С выхода второго преобразователя 26 напряжение40 частота частота, пропорциональная текущему значению входного напряжения, поступает на входы третьего 7, четвертого 8, седьмого 19 и восьмого 20 элементов И. Так как при вращении в
45 прямом направлении третий D-триггер 22 установлен в нулевое состояние, на его инверсном выходе присутствует логическая единица, которая поступает на вторые входы второго 6 и третьего 7 элементов И. При этом на вторых входах первого 5 и четвертого 8 элементов И присутствует логический ноль.
С выхода второго элемента И 6 импульсы с частотой, пропорциональной текущему напряжению на входе первого преобразователя 25 напряжение - частота, поступают на суммирующий вход первого реверсивного счетчика 10.
50
55
С выхода третьего элемента И 7 импульсы с частотой, пропорщГональной текущему напряжению на входе второго преобразователя 26 напряжение - частота, поступают на вычитающий вход второго реверсивного двоичного счетчика 11. Логическая единица с инверсного выхода первого D-триггера 14
поступает на второй вход шестого эле- IQ зируюпщм входом первого D-триггера
мента И 18, с выхода которого импульсы с такой же частотой, которая поступает на первый реверсивный счетчик 10, поступают на вход коммутатора 23 фаз шагового двигателя X координаты. С выхода последнего фазовые импульсы поступают на усилители 27 токов фаз шагового двигателя X координаты и далее через выход 29 интер14, также включенного в режим счетн го триггера, то первый D-триггер 14 переклгочится в единичное состояние логическая единица появится на его 15 прямом выходе, сое-диненном с вторым вход ом пятого элемента И 17. Это вы зывает изменение направления движе- ния двигателя X координаты (двигатель X координаты будет перемещать
полятора к обмоткам шагового двигате- 20 двухкоординатньй сто.п влево) . Одноля X координаты, который начинает перемещать, например, координатный стол вправо.В это же время логическая единица с прямого выхода второго D-триггера 15.поступает на второй вход седьмого элемента И 19, с выхода которого импульсы с такой же частотой, которая поступает на вход второго реверсивного двоичного счетчика 11, поступают на вход коммутатора 24 фаз шагового двигателя Y координаты. С выхода последнего фазовые импульсы поступают на усилители 28 токов фаз шагового двигателя Y координаты и далее через выход 30 интерполятора к обмоткам шагового двигателя Y координаты, которьш начинает перемещать, например, двухкоординатный стол вниз. Таким образом, закон изменения координат перемещаемой точки осуществляется в соответствии с зависимостями:
X R cos Ч ;
Y R sinV
где-Х и За
Y текущие координаты точки, точку отсчета для данного варианта схемы принято значение угла , равное 90°.
При достижении содержимым первого реверсивного двоичного счетчика 10 значения радиуса вращения, хранимого в регистре 9 радиуса вращения, на выходе первого цифрового компаратора 12 Направление движения двухкоординатпоявляется сигнал логической единицы, который поступает на один из входов элемента ИЛИ 16. На другом входе элемента ИЛИ 16 в этот момент присутного стола по X координате не изменится.
Аналогично двухкоординатный стол будет перемещаться и в оставшихся
струет логический ноль. В результате на. выходе эл,емента 1-ШИ 16 появляется логическая единица. Передним фронтом этого сигнала третий D-триггер 22, включенный в режим счетного триггера, переключается в единичное состояние. Так как прямой выход третьего D триггера 22 соединяется с синхронн14, также включенного в режим счетного триггера, то первый D-триггер 14 переклгочится в единичное состояние и логическая единица появится на его прямом выходе, сое-диненном с вторым вход ом пятого элемента И 17. Это вызывает изменение направления движе- ния двигателя X координаты (двигатель X координаты будет перемещать
5
0
5
временно импульсы появятся на выходах первого 5 и четвертого 8 элементов И. При этом первьпЧ реверсивньш двоичный счетчик 10 будет работать в режиме вычитания, а второй реверсивный двоичньй счетчик 11 - в режиме сложения. Направление движения двух- координатного стола по Y координате не изменится.
При дост11жении содерж1-1мым второго реверсивного дво1гчного счетчика 11 значения радиуса вращения на выходе второго цифрового компаратора 13 появляется сигнал логической единицы, который поступает на один из входов элемента ИЛИ 16. На другом входе этого элемента в этот момент присутствует сигнал логического нуля, поэтому на выходе элемента ИЛИ 16 появляется логическая единица, переключающая третий D-триггер 22 в нулевое состояние. При этом на инверсном выходе третьего D-триггера 22 появляется логическая единица. Передним 5 фронтом этого сигнала второй D-триг- .гер 15 переключается в нулевое состояние. На инверсном выходе этого триггера появляется уровень логической единицы, поступающий на второй вход восьмого элемента И 20. Это вызывает изменение направления вращения двигателя Y координаты. Теперь двигатель Y координаты будет перемещать двухкоординатный стол вверх.
0
0
ного стола по X координате не изменится.
Аналогично двухкоординатный стол будет перемещаться и в оставшихся
двух квадрантах. Остановить работу интерполятора (и тем самым движение двухкоординатного стола) можно в любой момент, убрав сигнал ПУСК, Критерием остановки интерполятора может служить, например, определенное значение координаты точки, снимаемое с выходов реверсивных двоичных счетчиков 10 и 11 и передаваемое в устройство управления,
В режиме круговой интерполяции в обратном направлении устройство работает следующим образом.
В этом режиме из устройства управления через вход 3 задания враще- ния в обратном направлении отрицателным импульсом значение радиуса вращения переписывает ся из регистра 9 радиуса в первый реверсивный двоичный счетчик 10. Во второй реверсивный двоичный счетчик 11 вписываются нули, Одновременно с этим третий D-триггер 22 устанавливается в единичное состояние, первый D- триггер 14 также устанавливается в единичное состояние, а второй D-триггер 15 - в нулевое. Дальнейшая работа интерполятора в этом режиме гична круговой интерполяции по- часовой, стрелке, кроме направле- ния вращения. За точку отсчета для данного варианта схемы принято значение угла , равное 0. Иачальньш угол Ч (О или 90) задается через второй вход, цифрового функционально- го генератора. Изменяя частоту 1диф- рового генератора, можно изменить скорость интерполирования, не изменяя максимальной скорости перемепде- ния привода.
Применение цифрового кругового ин терполятора в системах числового программного управления металлорежущими станками позволяет улучшить качество круговой интерполяции и уве- личить производительность исполнительных органов, а следовательно, повысить качество саьшх изделий, изготавливаемых при помощи этих станков Это достигается благодаря повьшюнию быстродействия, точности и скорости интерполирования.
Формула изобретения
Цифровой круговой интерполятор, содержапщй первый и второй преобразователи напряжение - частота, первый и второй цифровые компараторы, выхо
5 0 0 5 0
5 0
5
ды которых соединены соответственно с первым и вторым входами элемента ИЛИ, отличающийся тем, что, с целью повышения быстродействия, в него введены регистр радиуса вращения, первьй и второй реверсивные двоичные счетчики, с первого по восьмой элементы И, первый, второй и третий D-триггеры, цифровой генератор функций . синуса и косинуса, ком 4утатор фаз шаговых двигателей X и Y координат, усилители токов фаз шаговых двигателей X и Y координат, вход управления второго реверсивного двоичного счетчика соединен с асИнхрон- ньм входом сброса первого О-триггера, с асинхронным входом установки второго D-триггера, с асинхронным входом сброса третьего П-триггера, с первым входом цифрового генератора функций синуса и косинуса, второй вход, которого является входом запуска интерполятора, вход управления первого реверсивного двоичного счетчика соединен с асинхронным ЕГХОДОМ установки первого D-триггера асинхронным входом сброса второго D-триггера, с
асинхронным входом установки третьеi
го D-триггера, выход регистра радиуса
вращения соединен с входами параллельной записи информации первого и второго реверсивных двоичных счетчиков и с первыми входами первого и второго цифровых компараторов, выход генератора функции косинуса цифрового функционального генератора соединен с входом первого преобразователя напряжение - частота, а вькод функции синуса цифрового генератора - с входом второго преобразователя напряжение - частота, выход первого преобразователя напряжение - частота соединен с первьми входами п ервого, второго, пятого и шестого элементов И, выход второго преобразователя напряжение - частота соединен с входами третьего, четвертого, седьмого и восьмого элементов И, прямой выход первого D-триггера соединен с вторым входом пятого элемента И, инверсный выход первого D-триггера соединен с информационным входом этого же триггера и с вторым входом шестого элемента И, прямой выход второго D-триг- ге.ра, соединен с вторым входом седьмого элемента И, инверсный выход второго D-триггера соединен с информационным входом этого же триггера и с
вторым входом восьмого элемента И, прямой выход третьего D-триггера соединен с вторыми входами первого и четвертого элементов И и синхронизирующим входом первого D-триггера, инверсный выход третьего D-триггера соединен с информационным входом этого же триггера, с вторыми входами второго и третьего элементов И и синхронизирующим входом второго D-триг- гера, а синхронизирующий вход третьего D-триггера соединен с выходом элемента ИЛИ, выход первого элемента И соединен с вычитающим входом первого реверсивного двоичного счетчика выход второго элемента И соединен с суммирующим входом первого реверсивного двоичного счетчика, выход третьего элемента И соединен с вычитаю- . щим входом второго реверсивного двойч- ного счетчика,выход четвертого элемента И соединен с суммирующим входом второго реверсивного двоичного счетчика, выход пятого элемента И соединен с входом обратного вращения коммутато- ра фаз шагового двигателя X координаты, выход шестого элемента И соединен с входом прямого вращения коммутатора фаз шагового двигателя X
координаты, выход седьмого элемента И соединен с входом обратного вращения коммутатора фаз шагового двигателя Y координаты, выход восьмого элемента И соединен с входом прямого вращения коммутатора фаз шагового двигателя Y координаты, выходы коммутатора фаз шагового двигателя X координаты соединены с входами усилителей токов фаз шаговых двигателей X координаты, а выходы коммутатора фаз шагового двигателя Y координаты соединены с входами усилителей токов фаз шаговых двигателей Y координаты, выхоД1з1 первого реверсивного двоичного счетчика соединены с вторыми входами первого цифрового компаратора, а выходы второго реверсивного двоичного счетчика соединены с вторыми входами второго цифрового компаратора, асинхронньй вход установки второго D-триггера является входом задания вращения в прямом направлении, асинхронный вход установки первого D-триггера является входом задания вращения в обратном направлении,вход регистра радиуса вращения является входом задания радиуса вращения интерполятора.
Редактор А.Лежнина
Составитель А.Исправникова
Техред В.Кадар Корректор Т.Колб
Заказ 3388/43 Тираж 863Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровой линейный интерполятор | 1986 |
|
SU1317396A1 |
| Цифровой линейный интерполятор | 1989 |
|
SU1709269A1 |
| Устройство стабилизации скорости резания для токарно-винтовых станков с числовым программным управлением | 1983 |
|
SU1180845A1 |
| Цифровой линейный интерполятор | 1989 |
|
SU1675849A1 |
| Многокоординатный цифровой интерполятор | 1984 |
|
SU1200246A1 |
| Система числового программного управления с постоянной скоростью резания для токарно-винторезных станков | 1981 |
|
SU978102A1 |
| Система числового программногоупРАВлЕНия "TPACCA-Кп | 1979 |
|
SU813371A1 |
| Устройство стабилизации скорости резания для токарных станков с ЧПУ | 1983 |
|
SU1136112A1 |
| Круговой интерполятор | 1988 |
|
SU1566321A1 |
| Цифровой линейный интерполятор | 1989 |
|
SU1615744A2 |
Изобретение относится к устройствам числового программного управления металлорежущими станками и может быть использовано для управления двухкоординатными системами в различных системах программного управления. Целью изобретения является повышение быстродействия интерполятора. В интерполятор введены регистр радиуса вращения, два реверсивных двоичных счетчика, восемь элементов И, три D-триггера, цифровой генератор функций синуса и косинуса, коммутатор фаз шаговых двигателей X и Y координат, усилители токов фаз шаговых двигателей X и Y координат. За счет непрерывного взаимно синхронизированного управления преобразователями напряжение - частота цифровым генератором функций синуса и косинуса достигается точное взаимно согласованное перемещение X и Y координат по дуге окружности. 1 ил. G 5S
| Цифровой линейный интерполятор | 1975 |
|
SU551611A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Линейный интерполятор | 1979 |
|
SU993210A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
