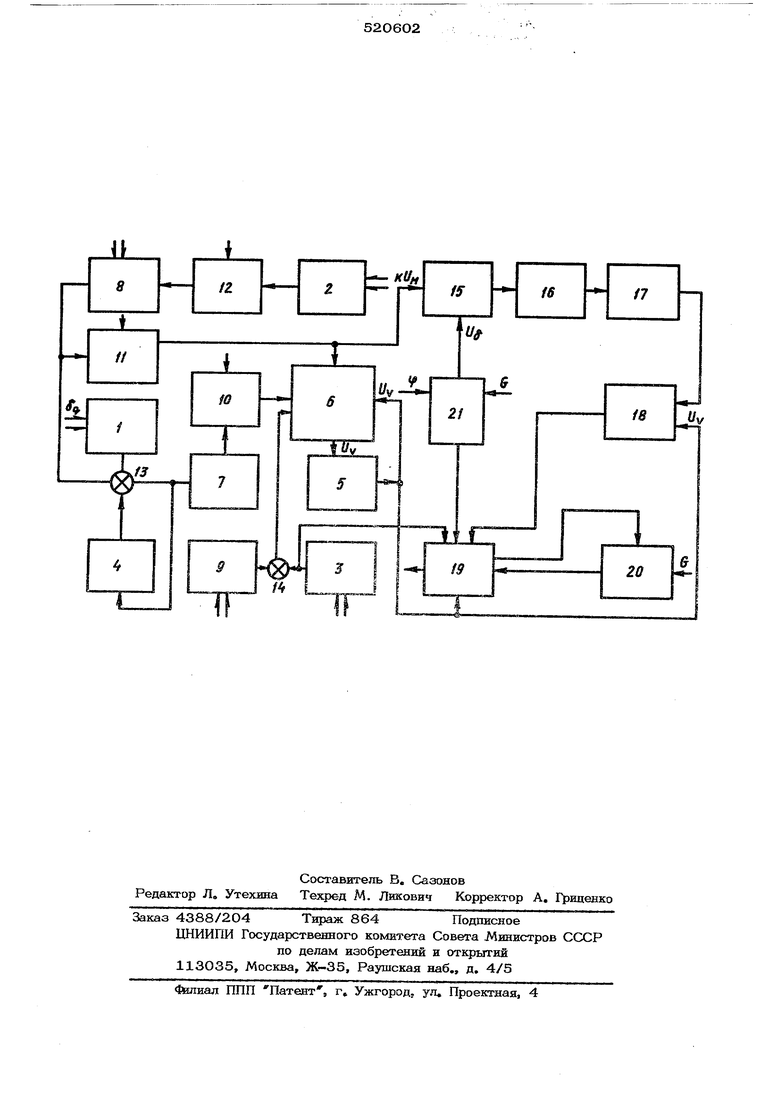
точность моделирования существевио снвжается, Целью изобретении является noBbimeiiHe точности моделирования Эта цель достигается тем, что предло женное устройство содержит дополнительны блок сравненияа первый вход которого со& динен с выходом функционального преобразователя характеристик тормоза, блок мо делирования характеристик юза, вход кото™ рого соединен с выходом дополнительного блока сравнения, а выход - с его вторым входом, блок моделирования характеристик дороги, первый выход которого подключен к третьему входу дополнительного блока сравнения, и последовательно соединенные блок деления, блок ограничения и масштабирования, функциональный преобразователь характеристик буксования и блок умножения, другой вход которого подключен к четвертому входу дополнительного блока сравнения, пятый вход которотэ соещгнен с выходом блока умножения Выход блока моделирования характеристик дороги подключе к перво , входу блока деления, вторым входом соединенного с третьим входом ооновного блока сравнения и выходом второго блока моделирования характеристик коробки передач, а четвертый вход основного блока сравнения и выход интегратора подключены к четвертому входу дополнительного блока сравнения. На чертеже изображейо предлагаемое устройство. Устройство содержит функциональный гфеобразователь характеристик двигателя 1 функциональный преобразователь характерно тик сцепления 2, функциональный преобра ° зователь характеристик тормоза 3, блок дифференцирования 4, интегратор 5, основной блок сравнения 6, ограничитель 7 первый 8 и второй 9 блоки моделиро вания внешней нагрузки, первый 1О, второй 11 в третий 12 блоки моделирования характеристик, первый 13 и второ 14 сумматоры, блок деления 15, блок огр ничения и масштабирования 16, функционал ный преобразователь характ истяк буксования 17, блок умножения 18, доно,лнктеяь ный блок сравнения 19s блок моделировани характеристик юза 20 и бяок моделироБаки характеристик дороги 21 Блок деления 3-5, блок ограничения и масштабирования i6s функциональный прео р азователь х-эрактеристик буксования 17 и блок умножения 18 соединены последовате но. Первый вход блока сраанения 19 соединен с выходом преобразователя характерн тик тормоза 3, Вход блока моделирования характеристик юза 20 соединен с выходом лока сравненая 19, а выход - с его втс ым входом Первый выход блока моделям ования характеристик дороги 21 подклв ек ж третьему входу блока сравнения 19, четвертому входу которого подсоединен ДИН из входов бло1ш умножения 18, своим ыходом подключешаого к пятому входу сравнения 19в В|дход блока моделирова ния xapas epjsicTaK дороги 21 подключен к первому входу блока деления 15, вторым входом соедгшояного с третьим входом блока сравнения 6 и выходом второго блока моделирования характеристик коробки пер&дач 11, а чет.вертый вход блока сравнения 6 и выход интегратора 5 подключены к четвертому входу блока cpaBHeiiHH 19, Устройство работает следующим образом, Блоки в coBOKjTiHocTH моделируют окружную скорость вращения ведущих колес автомобиля UY в соотваа-ствии с описанием по am-, ев, № 486333, BJJOX моделирования характеристик доро ги 21 имеет ,цва выхода, на которых формируются напряжения Ug- и Uy, пропорциональные дорожному коэффициенту сцепления и весу автомобиля G Ug K.g- -6-;U Kj -4-Gi SiOT блок может быть реализован, например, в виде сдвоенного ступенчатого делителя напря5кения, Имитация буксования осуществляется следующим образом. Напряжение U поступает на блок деления 15 в качестве делимого. На этот же блок в 1шчестве делителя посту пает напряжение К и jy с выхода второго блока моделирования характеристих коробки передач 11s Сигнал иэопорциональный велзак -- .cf.G чине f йгтеанмчнвается и масштаби « WlW рует-ся в боке 16е Степень буксования за- зксггг О1 соотношения величин и КИц, , будет тем вышов чем больше величина KU,,j и меньше Itg-f-Gs прячем зта завис мость непннеВзаНс Поэтому, сигнал с вькхо да блока масштабирования и огр.ани далня 16 иодае-тся на вход функдиана,тгьЕ:ого креобр -зователЕ характеристик .соЕалйя 17в Функ- :аиойа,1шнаЕ зайисньлость выходного напряже- йия (Л- входаого соответствует и.звестЕЫм хэракгеристижам иродесса буксоьанияв Пре- обр-азователь 17 может реализован например, в виде нелянейной следящей сис« теыыа -Канрзгженнэ с выхода преобразователя 17, диапазон которого от нуля до единицы, подаетк.я на блоз; угушожения 18 на друи ой В7ьОд которого подае1м:;я яапряжение npt лорщшяальное окружной скорости вращения Bs.ajiuHji хожгса В рез}льтате напряжение ILg яа выходе блсжа углноження 18 cooTseixriw вует действжге гь-иой сжоростря npsMOJTSHe&- норо двт-Бкения автомобили с учетом буксср ванан Это налр,Ежелие при отс;утс1Вйж юза через второй блок сравнения подается на имитаторы физич еских факторов движения автомобиля. Имитация юза осуществляется следующим образом. Напряжение и ц, с блока моделирова ния характеристик дороги 21 поступает на вход второго блока сравнения 19, На дру1ч вход этого же блока 19 подается напряжение UY с выхода функционального преобразователя характеристик тормоза 3, цропорпиональное величине силы торможения на колесах Р . Если выполняется условиеPj. К f& т. е, U,.U то вогвикает юз. При атом имитаторы физических факторов движения с помощыо второго блока сравнения 19 отключаются от выхода блока умнож шя18 и подключаются к выходу блока моделирования юза 2О, который представляет собой инерционное звено с постоянной времени, соответствующей инерционным свойствам автомобиля, В качестве начального условия на это инерционное звено через блок сра&нения 19 подается напряжение tl . При возникновении юза напряжение U с вход блока 2О снимается, а на имитаторы физических факторов движения поступает умеш шаюшеесЕ по экспоненте напргжение с выхода блока 2О независимо от величины напряжения на выходе блока 18, Предлагаемое устройство и обеспечивает процесс обучения водителя в сложных условиях, в том числе и таких, которые по соображениям безопасности недопустимы при непосредственном обучении на автомо биле. Кроме того, область применения устр ства расяшрена. Формула изобретения Устройство для моделирования прямолв нейного движения автомобиля в тренажере по авт, ев, № 486333, отличающееся тем, что, с целью увеличения точности моделирования, оно содержит дополнительный блок сравнения, первый вход которого соединен с выходом функционального преобразователя характеристик тормоза, блок моделирования характеристик юза, вход которого соединен с выходом дополнительного блока сравнения, а выход - с его вторым входом, блок моделирования характеристик дороги, первый выход которого подключен к третьему входу дополнительного блока сравнения, и последовательно соединенные блок деления, блок ограничения и масштабирования, функциональный преобразователь характеристик буксования и блок умножения, другой вход которого подключен к четвертому входу дополнительного блока сравнения, пятый вход которого соединен с выходом блока умножения; выход блока моделщ ования характеристик дороги подключен к первому входу блока деления, вторым входом соединенного с третьим входом основного блока сравнения и выходом второго блока моделирования характеристик коробки передач, а четвертый вход основного блока сравнения и выход интегратора подключены к четвертому входу дополнител1 ного блока сравнения. Источники информации, принятые во BHJE мание при экспертизе: 1, Авторское свидетельство СССР № 486333, М, Кл, G 06 ff 7/70, 1973 г.
ii
.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования прямолинейного движения автомобиля в тренажере | 1973 |
|
SU486333A1 |
| Кинотренажер водителя гусеничной машины | 1987 |
|
SU1531707A1 |
| Устройство для моделирования динамики движения гусеничной машины | 1982 |
|
SU1083207A2 |
| Устройство для моделирования динамики движения гусеничной машины | 1980 |
|
SU940186A2 |
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ОТ БОКСОВАНИЯ И ЮЗА КОЛЕСНЫХ ПАР ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 1991 |
|
RU2025310C1 |
| Устройство для моделирования механической передачи | 1979 |
|
SU881777A1 |
| Устройство для моделирования динамики движения гусеничной машины | 1981 |
|
SU1003115A1 |
| Стенд для испытания системы управления торможением колес транспортного средства | 1983 |
|
SU1152837A1 |
| Стенд для исследования динамики транспортных машин | 1984 |
|
SU1219934A1 |
| Устройство для защиты от юза колесных пар электроподвижного состава | 1986 |
|
SU1384433A1 |