1
Предлагаемая цифровая следящая система относится к области автоматики и может найти широкое применение нри построении систем автоматического регулирования.
Известна цифровая следящая система, содержащая соединенные последовательно первый преобразователь «угол-код, первое устройство сравнения кодов, преобразователь «код-напряжение, усилитель, двигатель, редуктор, и второй преобразователь «угол-код.
Такая система не позволяет обеспечить необходимой динамической точности, так как наличие редуктора с присущими ему нелинейными характеристиками, находящегося в замкнутом контуре системы, вызывает колебательные процессы, существенно понижающие ее динамическую точность.
С целью повышения динамической точности предложенная система содержит второе устройство сравнения кодов, входы которого соединены с преобразователями «угол-код, включенные последовательно генератор импульсов и ключ, цифровой дифференциатор, связанный с выходом первого преобразователя «угол-код, и импульсный датчик положения, установлепный на валу двигателя. Система содержит также реверсивный счетчик, ггервый вход которого соединен с цифровым дифференциатором, второй - с выходом импульсного датчика положения, третий - через
ключ с выходом второго устройства сравнения кодов, а выход подключен ко входу первого устройства сравнения кодов.
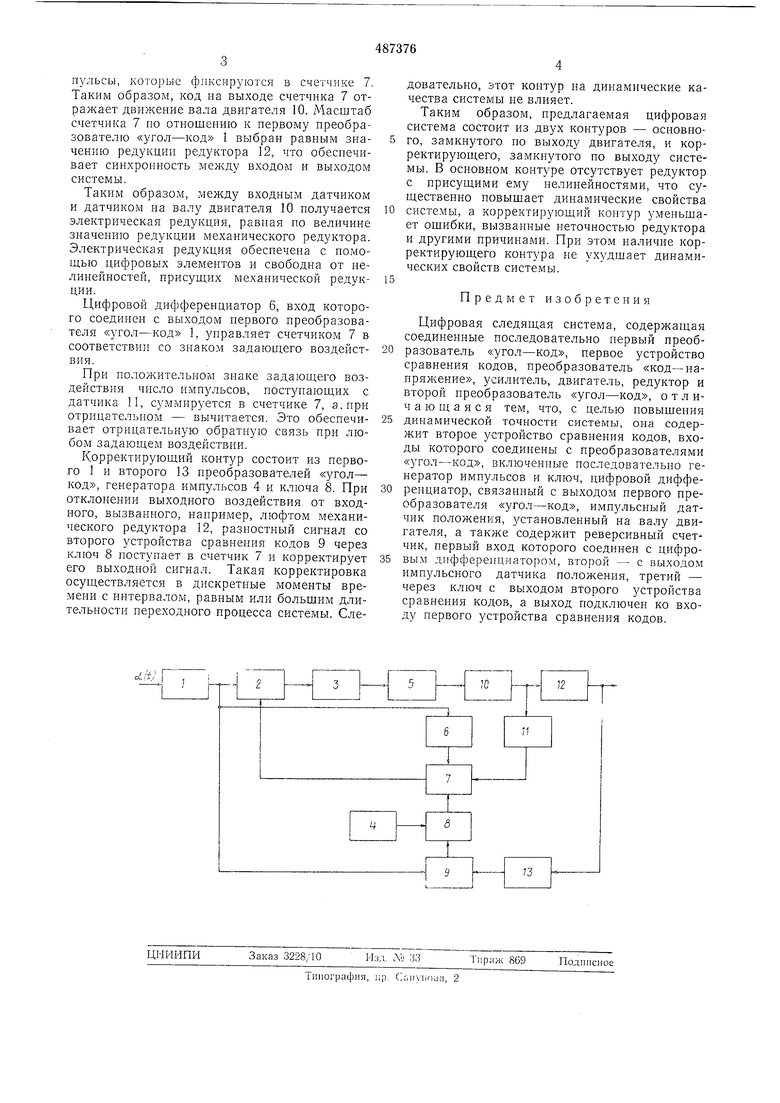
На чертеже представлена блок-схема устройства.
Оно содержит первый преобразователь «угол-код 1, первое устройство сравнения кодов 2, преобразователь «код-напряжение 3, генератор импульсов 4, усилитель 5, цифровой дифференциатор 6, реверсивный счетчик 7, ключ 8, второе устройство сравнения кодов 9, двигатель 10, импульсный датчик положения 11, редуктор 12 и второй преобразователь «угол-код 13.
Цифровая следящая система работает следующим образом.
На вход системы поступает задающее воздействие сх(/). В первом устройстве сравнения кодов 2 сравнивается задающий закон,
поступающий в виде кода с первого преобразователя «угол-код 1, и закон на валу двигателя 10, поступающий в виде кода с счетчика 7. Закон движения вала двигателя 10 формируется с помощью импульсного датчика положения 11 (например, индукционного датчика с магнитными вставками), расположенного на валу двигателя 10.
При прохождении магнитных вставок, расположенных на валу двигателя 10, через неподвижную часть датчика формируются им
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровая следящая система | 1976 |
|
SU646304A1 |
| Следящая система | 1985 |
|
SU1290251A1 |
| Вентильный электропривод | 1989 |
|
SU1704240A1 |
| Преобразователь код-угол | 1984 |
|
SU1216826A1 |
| Устройство для преобразования угла поворота вала в код | 1974 |
|
SU610148A1 |
| Цифровой следящий электропривод | 1979 |
|
SU800960A1 |
| Система программного управления | 1979 |
|
SU817669A1 |
| ЦИФРОВОЙ ЭЛЕКТРОПРИВОД | 2009 |
|
RU2404449C1 |
| Устройство записи-воспроизведениягЕОфизичЕСКОй иНфОРМАции | 1979 |
|
SU805237A1 |
| Число-импульсный следящий электропривод | 1983 |
|
SU1124256A1 |
