1
Изобретение относится к устройствам для вывода информации от цифровых вычислительных машин в графическом виде.
Известны двухкоординатные регистрирующие устройства, содержащие планшет с неподвижными направляющими, на которых установлены две взаимно перпендикулярные подвижные штанги с кареткой и пишущим элементом, и приводы, связанные со штангами посредством тросовой системы.
Однако в таких устройствах каретка, несущая пишущий элемент, выполнена в виде цельной ступицы, жестко связывающей штанги, что усложняет устранение угловой погрешности при их установке и приводит к снижеиию точности регистрации результатов обработки Н11форл1ации, снижению надежности и jpOKa службы устройства.
Для повышения точности регнстраци каретка иредлагаемого устройства выполнена в виде двух ползунов, свободно установленных на штангах и нодвнжно соединенных между собой посредством втулки, являющейся их общей осью вращения.
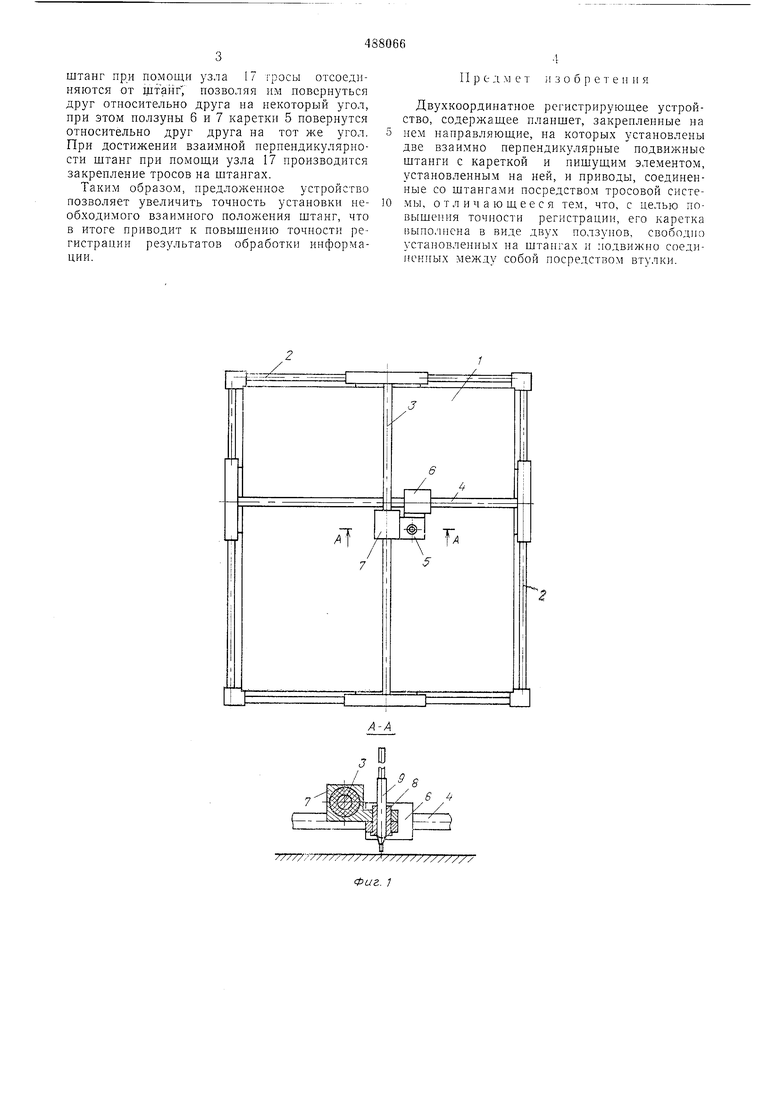
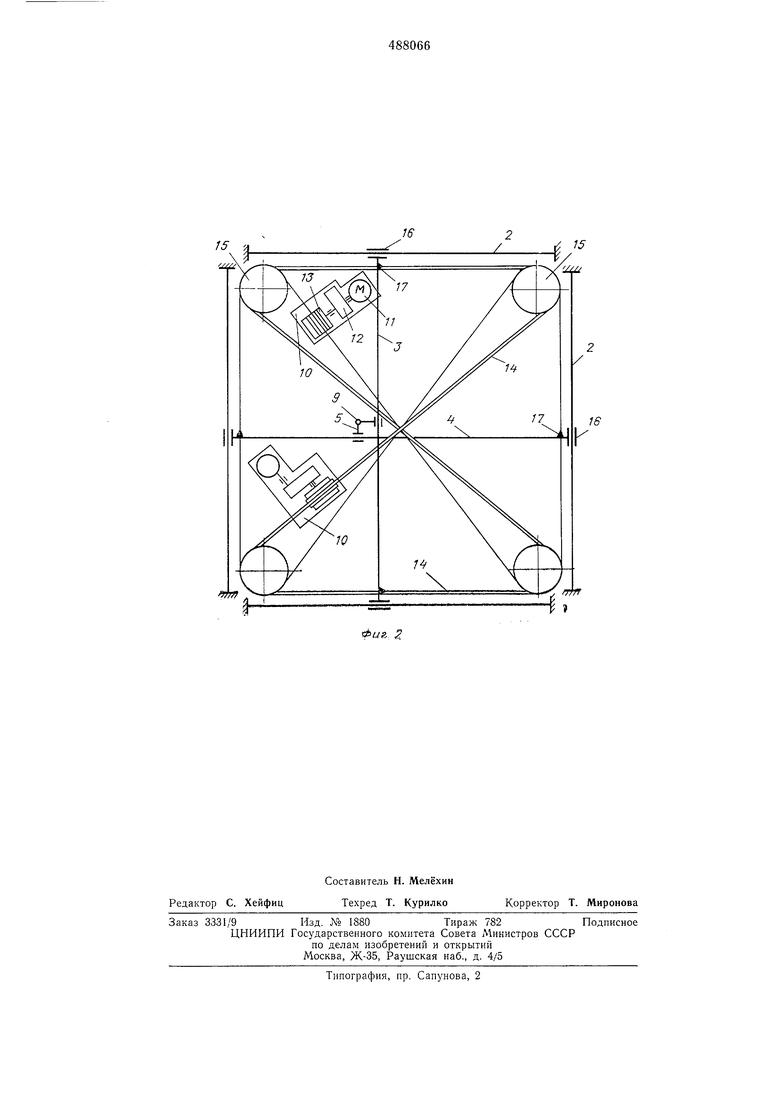
На фиг. 1 показано описываемое устройство в плане и разрез по А-А; на фиг. 2 - его кинематическая схема.
Устройство содержит планшет 1 с бумагой, укрепленной электростатически, неподвижные направляющие 2, на которых установлены
две подвижные штанги 3 и 4, каретку 5, состоящую из двух ползунов 6 и 7, свободно установленных на штангах и подвижно соединенных между собой посредством втулки 8, в которую установлен пишущий элемент 9.
Приводы 10, состоящие из шагового двигателя 11, редуктора 12 и барабана 13, связаны соответственно со штангами 3 и 4 тросовой
системой 14, нредставляющей собой две замкнутые ветви, огибающие ролики 15 и закрепленные на барабанах. Штанги снабжены опорами скольжения 16 и узлами крепления 17, посредством которых тросы крепятся к
штангам.
Устройство работает следующим образом. При поступлении сигнала от схемы управления (не показанной на чертеже) на шаговые двигатели 11 вращательное движение валов этих двигателей через редукторы 12, барабаны 13 и тросовую спетому 14 преобразуется в линейные перемещения штанг 3 и 4 по обеим осям координат, вызывая перемещения каретки 5 с устаиовленным на ней пишущим элементом 9.
Точность установки штанг 3 и 4 относительно друг друга и, следовательно, уменьшение погрешности регистрации достигается при по.мощи узлов крепления 17 и каретки 5. При
установке взаимной перпендикулярности
штанг при помощи узла 1/ тросы отсоединяются от щтанг, позволяя им повернуться друг относительно друга на некоторый угол, при этом ползуны 6 и 7 кареткп 5 повернутся относительно друг друга на тот же угол. При достижении взаимной перпендикулярности штанг при помощи узла 17 производится закрепление тросов на штангах.
Таким образом, предложенное устройство позволяет увеличить точность установки необходимого взаимного положения штанг, что в итоге приводит к повышению точности регистрации результатов обработки информации.
Пред м е т изобретения
Двухкоординатное регистрирующее устройство, содержащее планшет, закрепленные на нем направляющие, на которых установлены две взаимно перпендикулярные подвижные штанги с кареткой и пишущим элементом, установленным на ней, и приводы, соединенные со штангами посредством тросовой систе.мы, отличающееся тем, что, с целью повышения точности регистрации, его каретка ,1нена в виде двух ползунов, свободно установленных на штаигах и подвижно соединенных между собой посредством втулки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Графопостроитель | 1979 |
|
SU877587A1 |
| Графопостроитель" | 1978 |
|
SU779807A1 |
| Координатный механизм графопостроителя | 1983 |
|
SU1083211A1 |
| Двухкоординатный регистрирующийпРибОР | 1979 |
|
SU794377A1 |
| Прибор для построения кривых | 1990 |
|
SU1719250A1 |
| Графопостроитель | 1982 |
|
SU1026014A1 |
| ГИДРОПРИВОДНОЙ СТЕНД | 1997 |
|
RU2133389C1 |
| Привод каретки графопостроителя | 1980 |
|
SU883652A1 |
| Автономный мобильный модуль роботизированного хирургического инструмента | 2019 |
|
RU2715684C1 |
| Графопостроитель | 1987 |
|
SU1475835A1 |
2
/
Г
П
Т.
Л
5
15
/////
fffTf)
фи. Z
