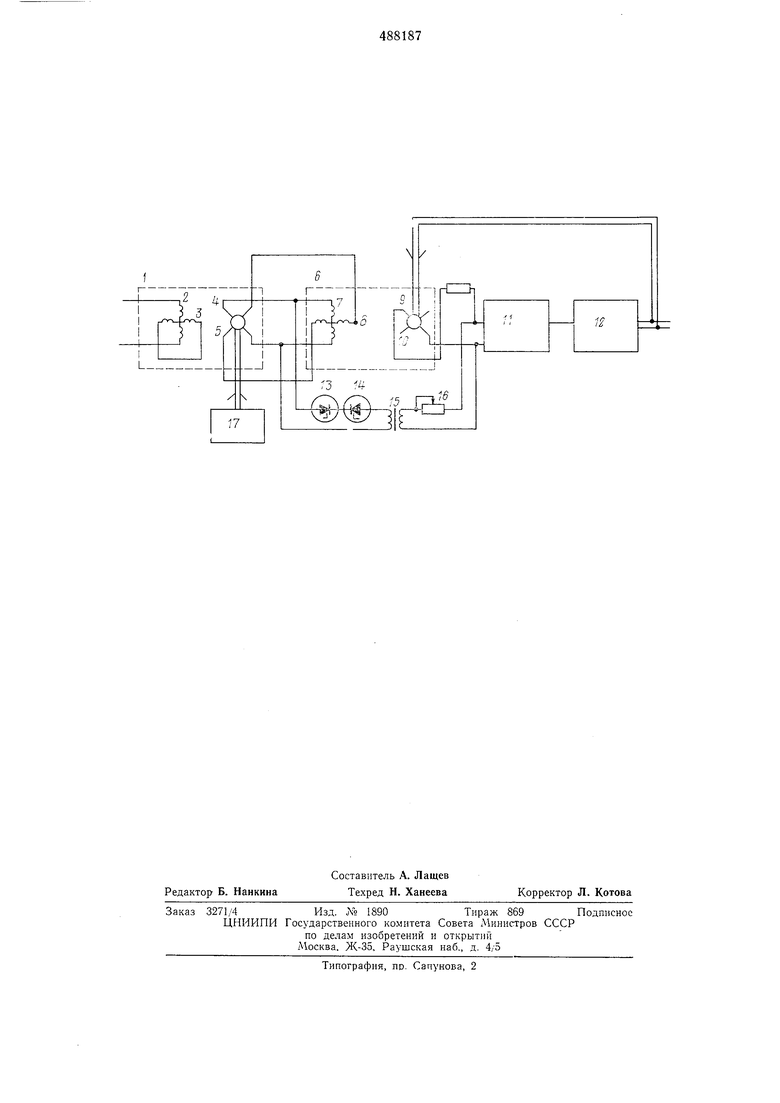
Она содерл ит задающий вращающийся трансформатор ВТ 1 с синусной 2 и косинусной 3 обмотками статора и синусной 4 и косинусной 5 обмотками ротора, отрабатывающий вращающийся трансформатор 6 с синусной 7 и косинусиой 8 обмотками статора и синусной 9 и косинусной 10 обмотками ротора, усилитель И переменного тока, исполнительный двигатель 12, стабилитроны 13 и 14, разделительный трансформатор 15 и переменный резистор 16; 17 - задающий механизм.
Задающий ВТ 1 связан по трансформаторной схеме с отрабатывающим iST 6, который механически соединен с выходным валом. Синусная обмотка 9 отрабатывающего ВТ б соединена со входом усилителя 11 неременного тока, выход которого связан со входом исполпительиого двигателя 12, косинусная обмотка 5 ротора задающего ВТ 1 через встречно-последовательно включенные стабилитроны 13, 14 донолнительно соединена с нервичной обмоткой разделительного трансформатора 15, вторичная обмотка которого через неременный резистор 16 связана также со входом усилителя 11.
Следящая система работает следуюнигм образом.
До тех пор, нока угол поворота задающей оси не превышает предельной величины, напряжение на синусной обмотке 4 ротора задающего ВТ 1 пе превышает папряжеппя пробоя стабилитронов 13, 14. Поэтому нервичпая обмотка разделительного трансформатора 15 оказывается обесточенной, и вся цепь, состоящая из стабилитронов 13, 14, разделительного трансформатора 15, переменного резистора 16, пе оказывает никакого влияния иа работу системы, которая работает в обычпом режпме синхроиной связи.
Как только угол поворота задающей оси достигает предельной величины, напряжение синусной обмотки 4 ротора задающего ВТ 1 становится равным величине напряжения пробоя стабилитропов 13, 14, и на первичную обмотку раз.з,елительного трансформатора 15 поступает напряжение, равное разностн между величиной напряжения па синусной обмотке 4 ВТ 1 и величиной напряжения стабилизации стабилитронов 13, 14. Это нанряжение со вторичной обмотки разделительного трансформатора 15 через неременный резистор 16 прикладывается ко входу усилителя 11 пере0 мепиого тока, компепсируя папряжеиие, снимаемое с синуспой обмотки 9 ротора отрабатывающего ВТ 6, в результате чего па выходе усилителя 11 напряжение будет отсутствовать и исполнительный двигатель 12 окажет.5 ся неподвижным, т. е. будет обеспечепо ограниченне угла поворота выходного вала следящей системы.
Формула изобретения
Следящая система с ограничением угла поворота выходного вала, содержащая задающий и отрабатывающий вращающиеся трансформаторы, обмотки которых соединены по
5 трансформаторной схеме, соединенные последовательно усилитель переменного тока и исполнительный двигатель, вал которого связан с ротором отрабатывающего вращающегося трансформатора, выходная обмотка которого подключена ко входу усилителя переменпого тока, отличающаяся тем, что, с целью уирощепия копструкции, увеличения надежности и точности ограничения, она содержит два стабилитрона, разделительный
5 трансформатор и переменный резистор, через который вторичная обмотка разделительного трансформатора соединена со входом усилителя переменного тока, а первичиая обмотка разделительного трансформатора через
встречно-последовательно включенные стабилитроны подключена параллельно синусной обмотке ротора задающего вращающегося трансформатора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система для отработки арктангенсной функции | 1973 |
|
SU488223A1 |
| Счетно-решающее устройство для преобразования прямоугольных координат вектора в сферические | 1973 |
|
SU475627A1 |
| Следящая система | 1982 |
|
SU1118961A1 |
| СЛЕДЯЩАЯ СИСТЕМА | 1993 |
|
RU2087026C1 |
| Следящая система | 1977 |
|
SU696407A1 |
| Следящий привод | 1978 |
|
SU697965A1 |
| СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ОТРАБОТКИ ВЕКТОРНОЙФУНКЦИИ | 1970 |
|
SU277905A1 |
| Фазовая следящая система | 1975 |
|
SU543973A1 |
| Устройство для формирования сектора запрета | 1981 |
|
SU964577A1 |
| СЛЕДЯЩАЯ СИСТЕМА | 1972 |
|
SU326546A1 |